
一种针对海上风电直流输电系统的无源鲁棒稳定控制方法.pdf

努力****爱静

1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种针对海上风电直流输电系统的无源鲁棒稳定控制方法.pdf
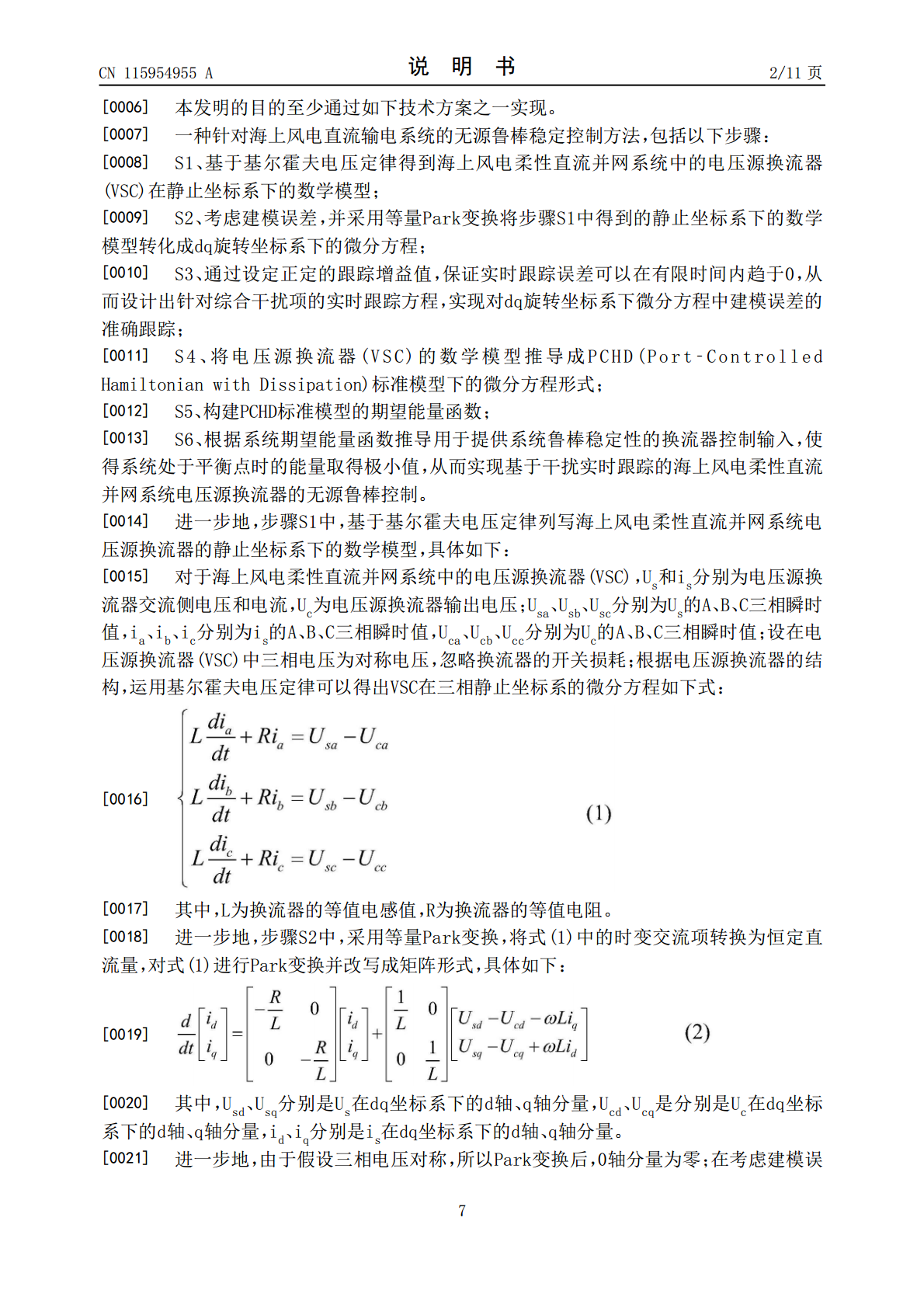
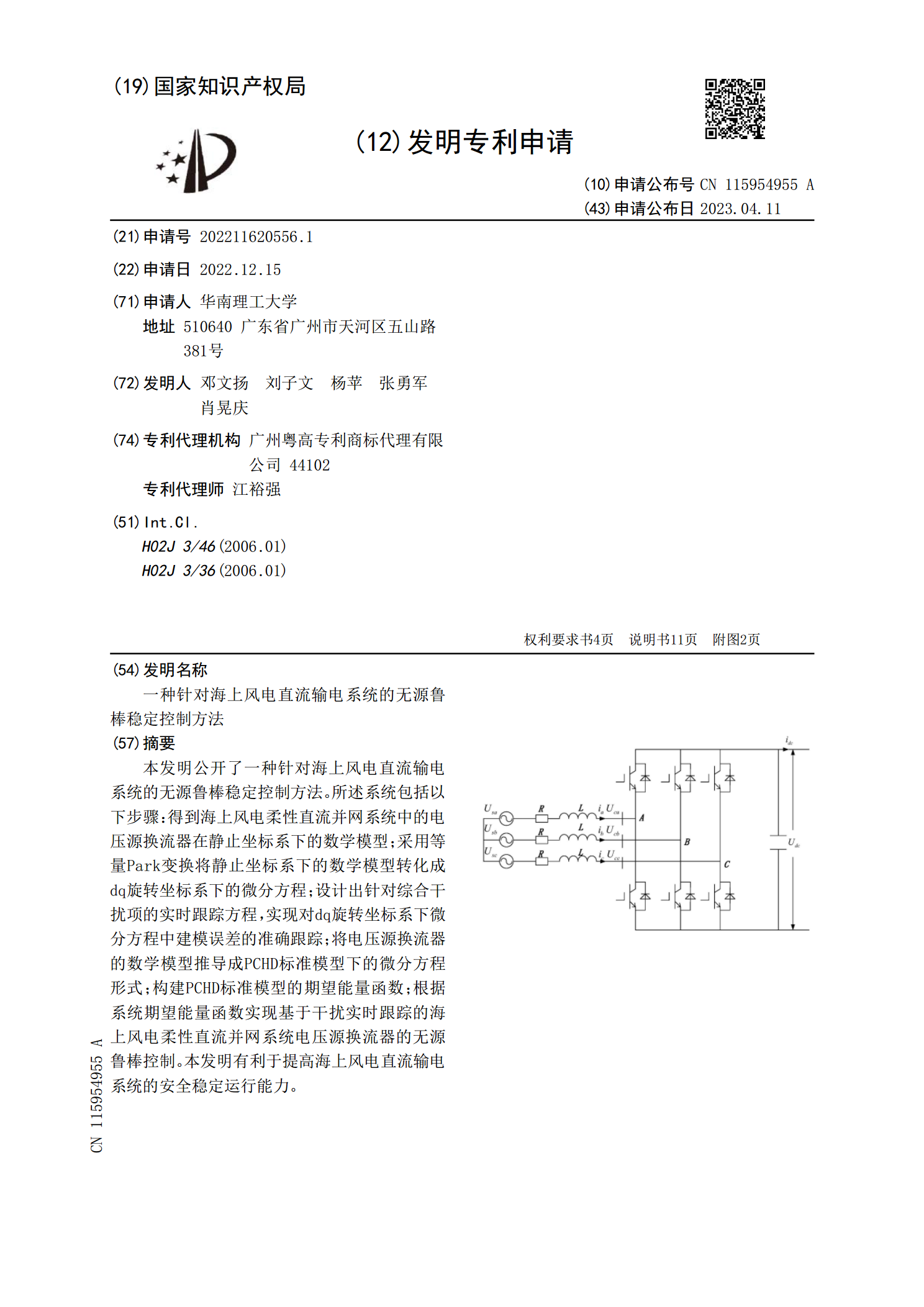
本发明公开了一种针对海上风电直流输电系统的无源鲁棒稳定控制方法。所述系统包括以下步骤:得到海上风电柔性直流并网系统中的电压源换流器在静止坐标系下的数学模型;采用等量Park变换将静止坐标系下的数学模型转化成dq旋转坐标系下的微分方程;设计出针对综合干扰项的实时跟踪方程,实现对dq旋转坐标系下微分方程中建模误差的准确跟踪;将电压源换流器的数学模型推导成PCHD标准模型下的微分方程形式;构建PCHD标准模型的期望能量函数;根据系统期望能量函数实现基于干扰实时跟踪的海上风电柔性直流并网系统电压源换流器的无源鲁棒
一种海上风电双极直流输电系统、控制方法及存储介质.pdf
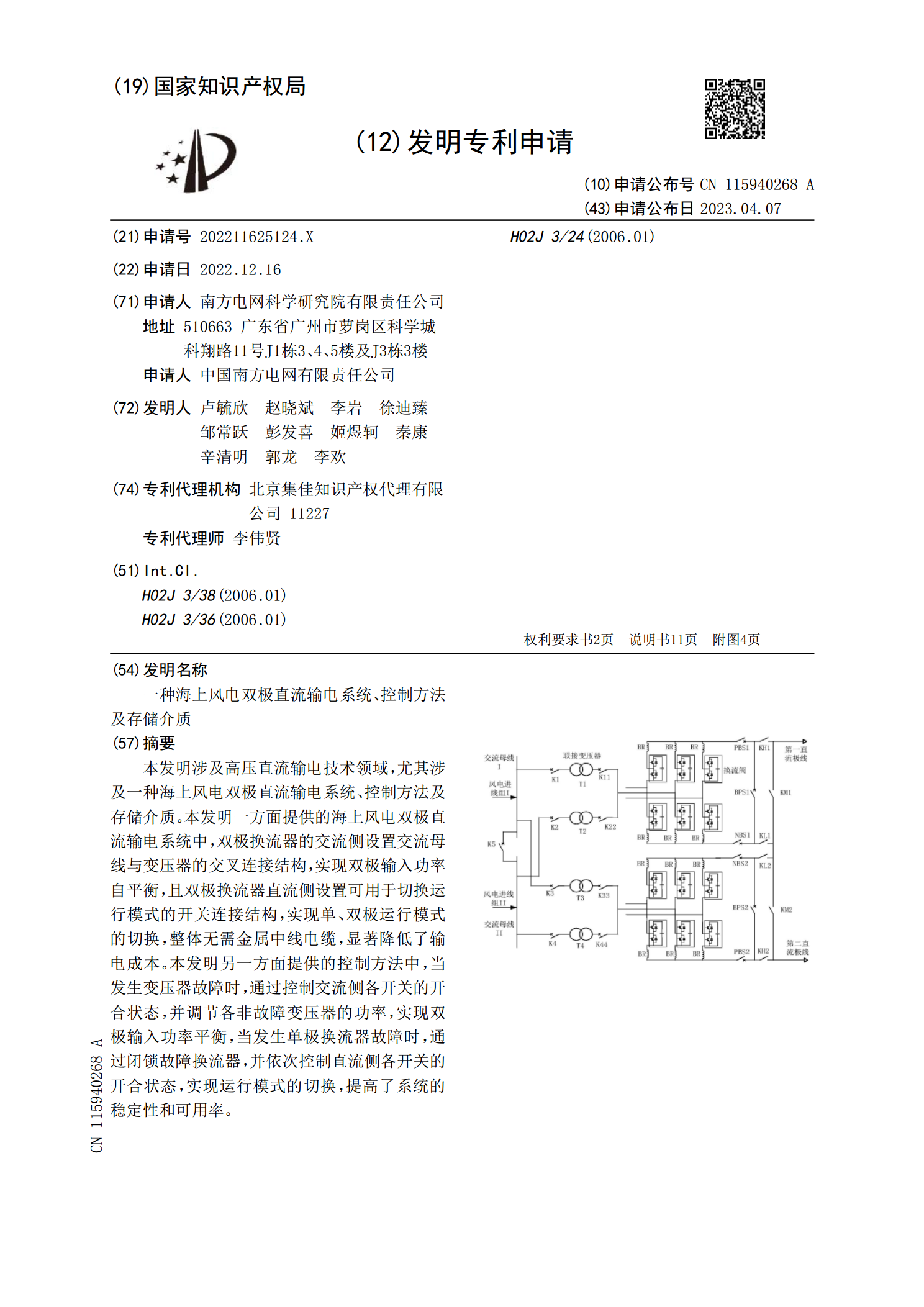
本发明涉及高压直流输电技术领域,尤其涉及一种海上风电双极直流输电系统、控制方法及存储介质。本发明一方面提供的海上风电双极直流输电系统中,双极换流器的交流侧设置交流母线与变压器的交叉连接结构,实现双极输入功率自平衡,且双极换流器直流侧设置可用于切换运行模式的开关连接结构,实现单、双极运行模式的切换,整体无需金属中线电缆,显著降低了输电成本。本发明另一方面提供的控制方法中,当发生变压器故障时,通过控制交流侧各开关的开合状态,并调节各非故障变压器的功率,实现双极输入功率平衡,当发生单极换流器故障时,通过闭锁故障
一种提高多端柔性直流输电控制系统鲁棒性的方法.pdf
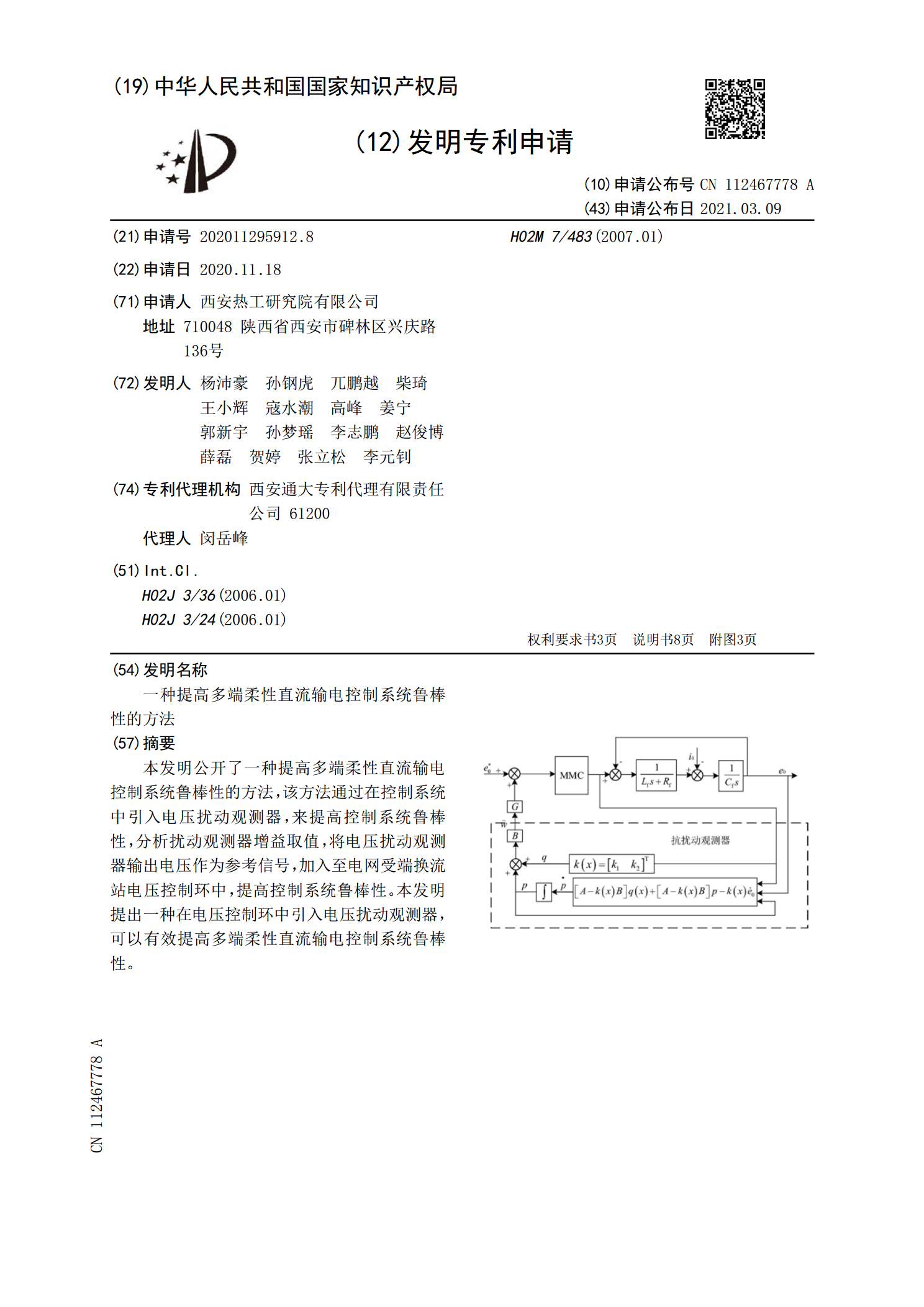
本发明公开了一种提高多端柔性直流输电控制系统鲁棒性的方法,该方法通过在控制系统中引入电压扰动观测器,来提高控制系统鲁棒性,分析扰动观测器增益取值,将电压扰动观测器输出电压作为参考信号,加入至电网受端换流站电压控制环中,提高控制系统鲁棒性。本发明提出一种在电压控制环中引入电压扰动观测器,可以有效提高多端柔性直流输电控制系统鲁棒性。
一种海上风电多电压等级直流汇集和交流输电系统及其方法.pdf
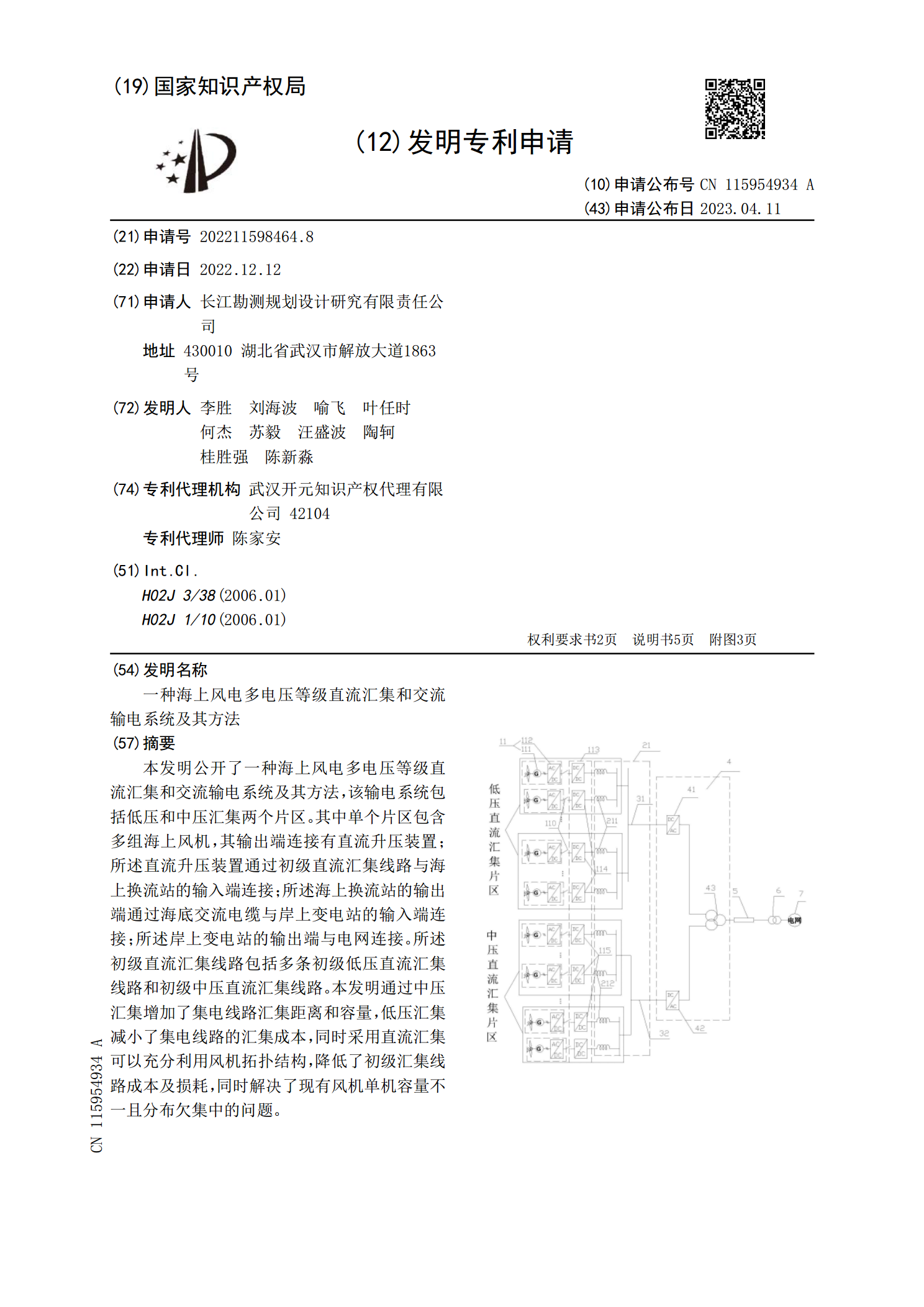
本发明公开了一种海上风电多电压等级直流汇集和交流输电系统及其方法,该输电系统包括低压和中压汇集两个片区。其中单个片区包含多组海上风机,其输出端连接有直流升压装置;所述直流升压装置通过初级直流汇集线路与海上换流站的输入端连接;所述海上换流站的输出端通过海底交流电缆与岸上变电站的输入端连接;所述岸上变电站的输出端与电网连接。所述初级直流汇集线路包括多条初级低压直流汇集线路和初级中压直流汇集线路。本发明通过中压汇集增加了集电线路汇集距离和容量,低压汇集减小了集电线路的汇集成本,同时采用直流汇集可以充分利用风机拓

海上风电柔性直流输电变流器研究.pdf
WindPower第24卷第2期电网与清洁能源Vo1.24No.22008年8月PowerSystemandCleanEnergyAug.2008文章编号:1674—0009(2008)02—0033—05中图分类号:TP11文献标志码:A海上风电柔性直流输电变流器研究王志新,李响,刘文晋(上海交通大学电气工程系,上海200240)ResearchonConverterofOffshoreWindEnergyFlexibleDirectCurrentTransmissionWANGZhi—xin,LIXi