
一种耦合驱动仿生扑翼飞行器.pdf

书生****35


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种耦合驱动仿生扑翼飞行器.pdf
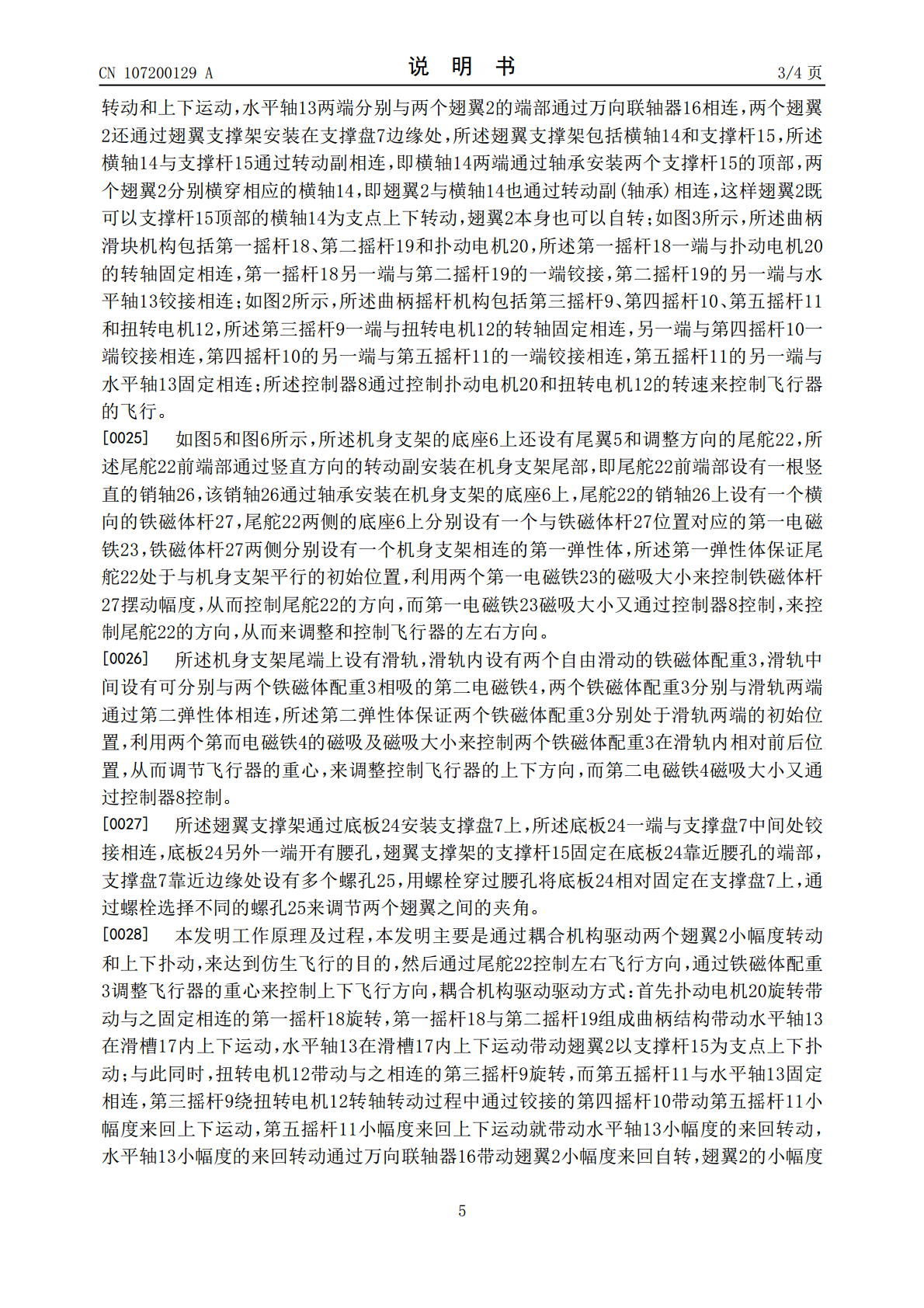
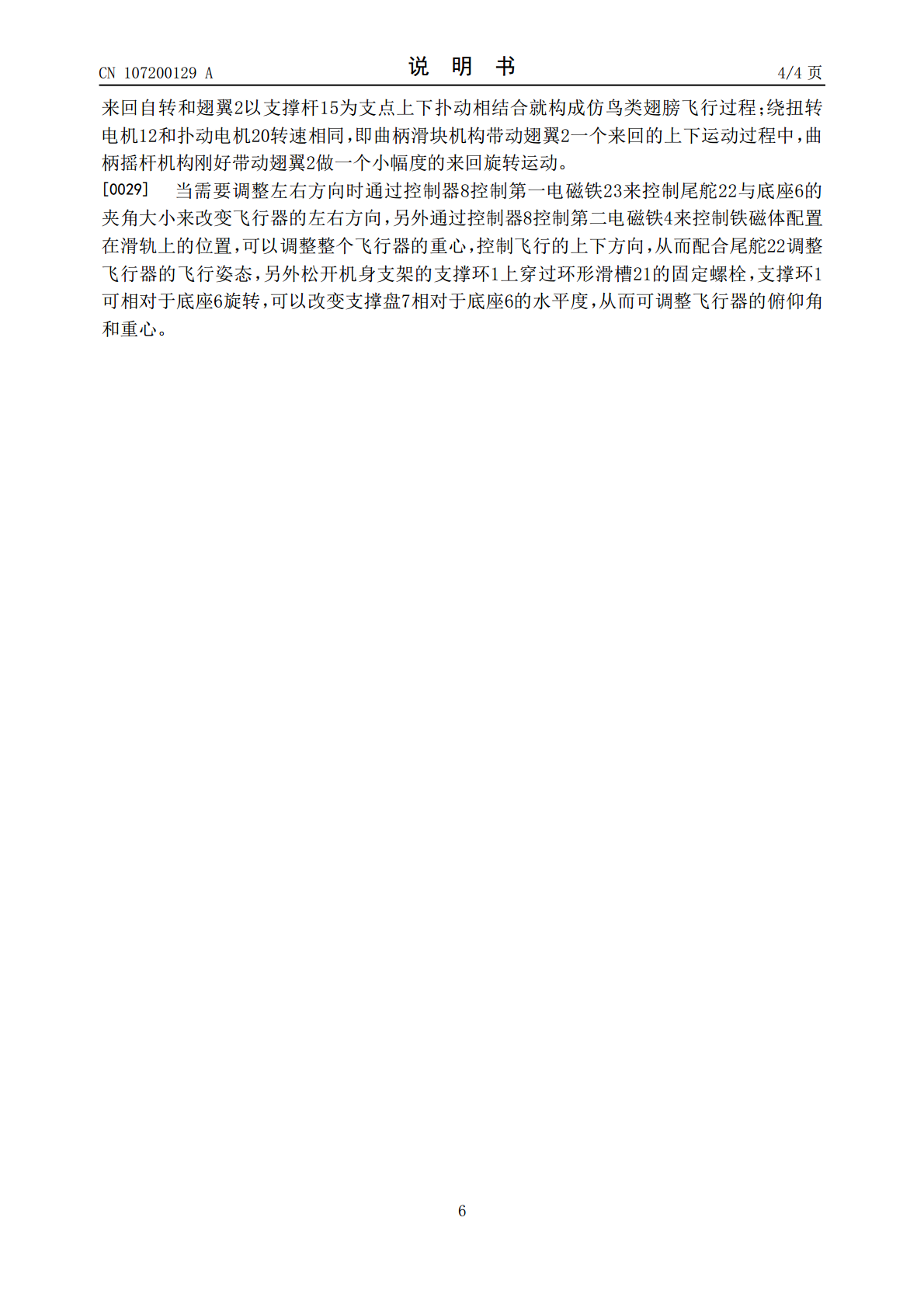
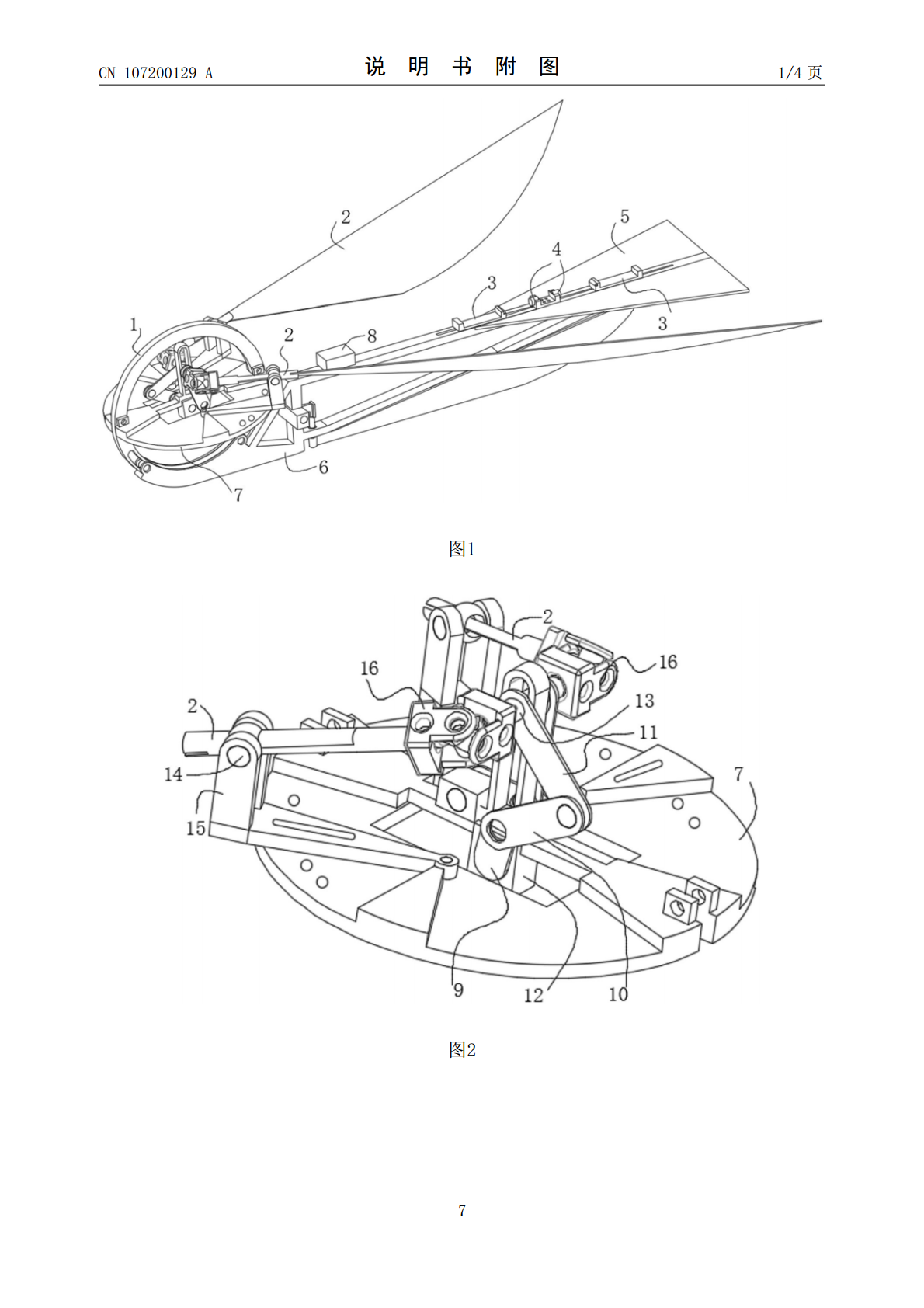
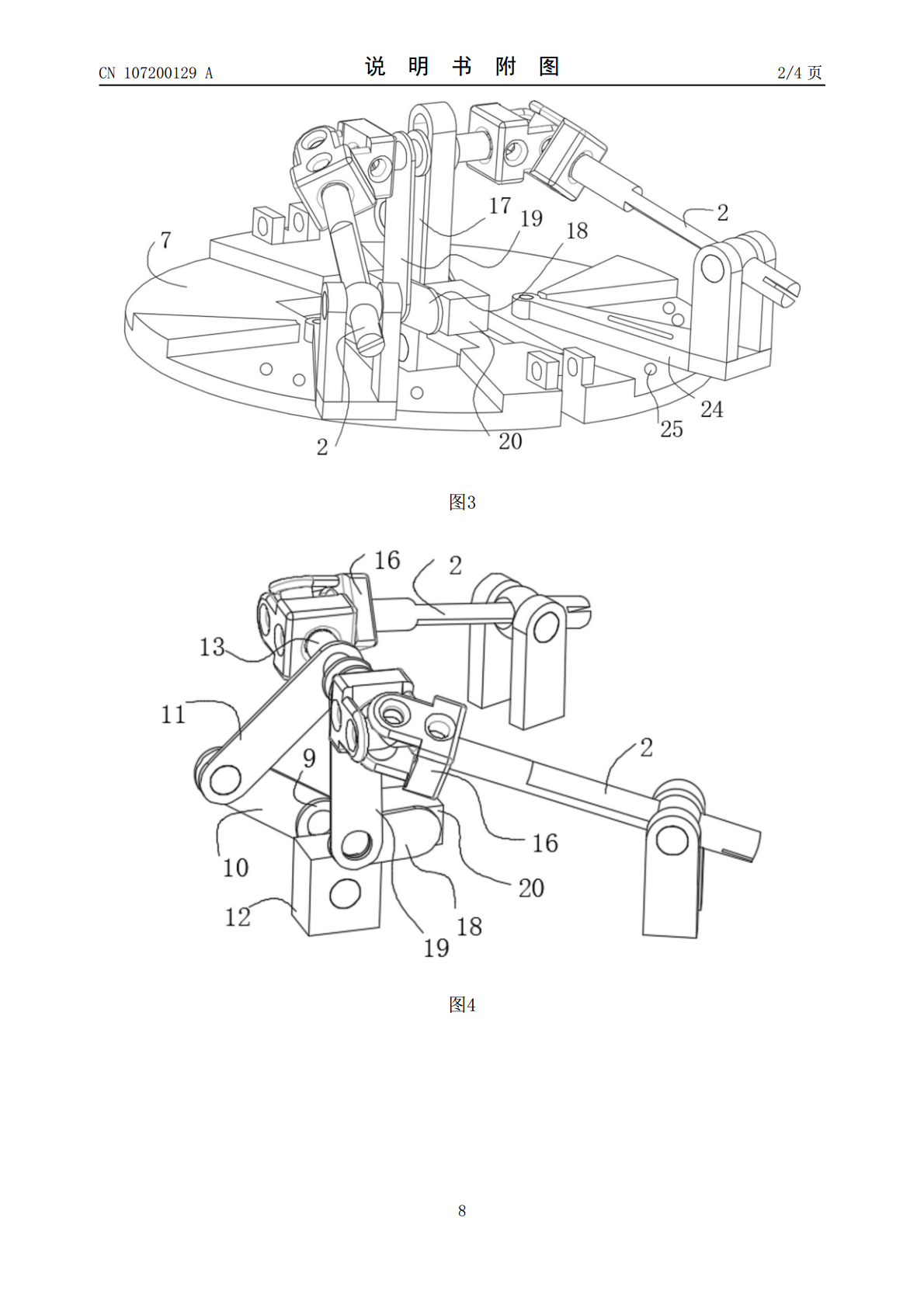
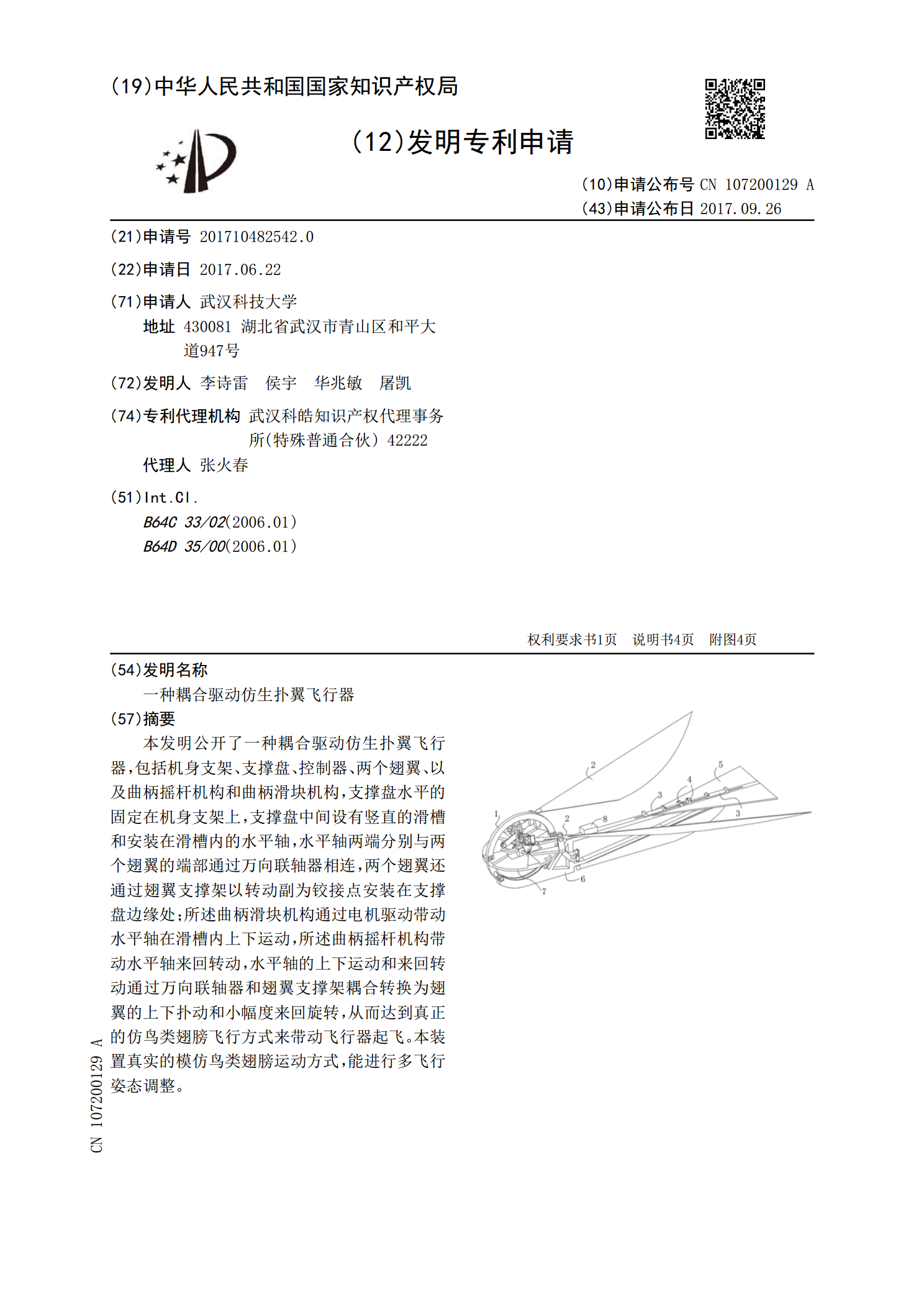
本发明公开了一种耦合驱动仿生扑翼飞行器,包括机身支架、支撑盘、控制器、两个翅翼、以及曲柄摇杆机构和曲柄滑块机构,支撑盘水平的固定在机身支架上,支撑盘中间设有竖直的滑槽和安装在滑槽内的水平轴,水平轴两端分别与两个翅翼的端部通过万向联轴器相连,两个翅翼还通过翅翼支撑架以转动副为铰接点安装在支撑盘边缘处;所述曲柄滑块机构通过电机驱动带动水平轴在滑槽内上下运动,所述曲柄摇杆机构带动水平轴来回转动,水平轴的上下运动和来回转动通过万向联轴器和翅翼支撑架耦合转换为翅翼的上下扑动和小幅度来回旋转,从而达到真正的仿鸟类翅膀
一种舵机驱动的扑翼飞行器及扑翼飞行器驱动方法.pdf
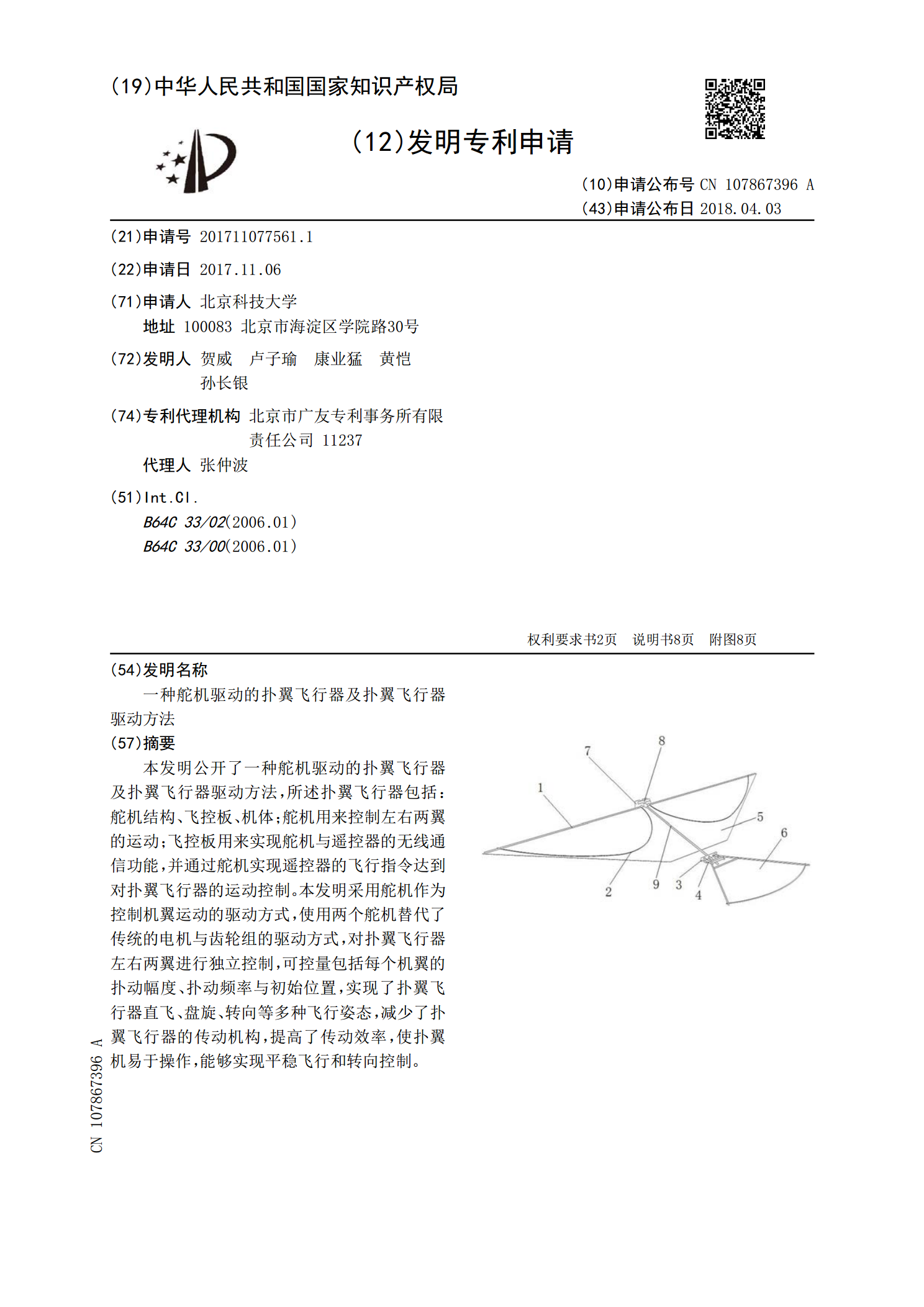
本发明公开了一种舵机驱动的扑翼飞行器及扑翼飞行器驱动方法,所述扑翼飞行器包括:舵机结构、飞控板、机体;舵机用来控制左右两翼的运动;飞控板用来实现舵机与遥控器的无线通信功能,并通过舵机实现遥控器的飞行指令达到对扑翼飞行器的运动控制。本发明采用舵机作为控制机翼运动的驱动方式,使用两个舵机替代了传统的电机与齿轮组的驱动方式,对扑翼飞行器左右两翼进行独立控制,可控量包括每个机翼的扑动幅度、扑动频率与初始位置,实现了扑翼飞行器直飞、盘旋、转向等多种飞行姿态,减少了扑翼飞行器的传动机构,提高了传动效率,使扑翼机易于操
一种扑动-折叠-主动扭转混合驱动的仿生扑翼飞行器.pdf
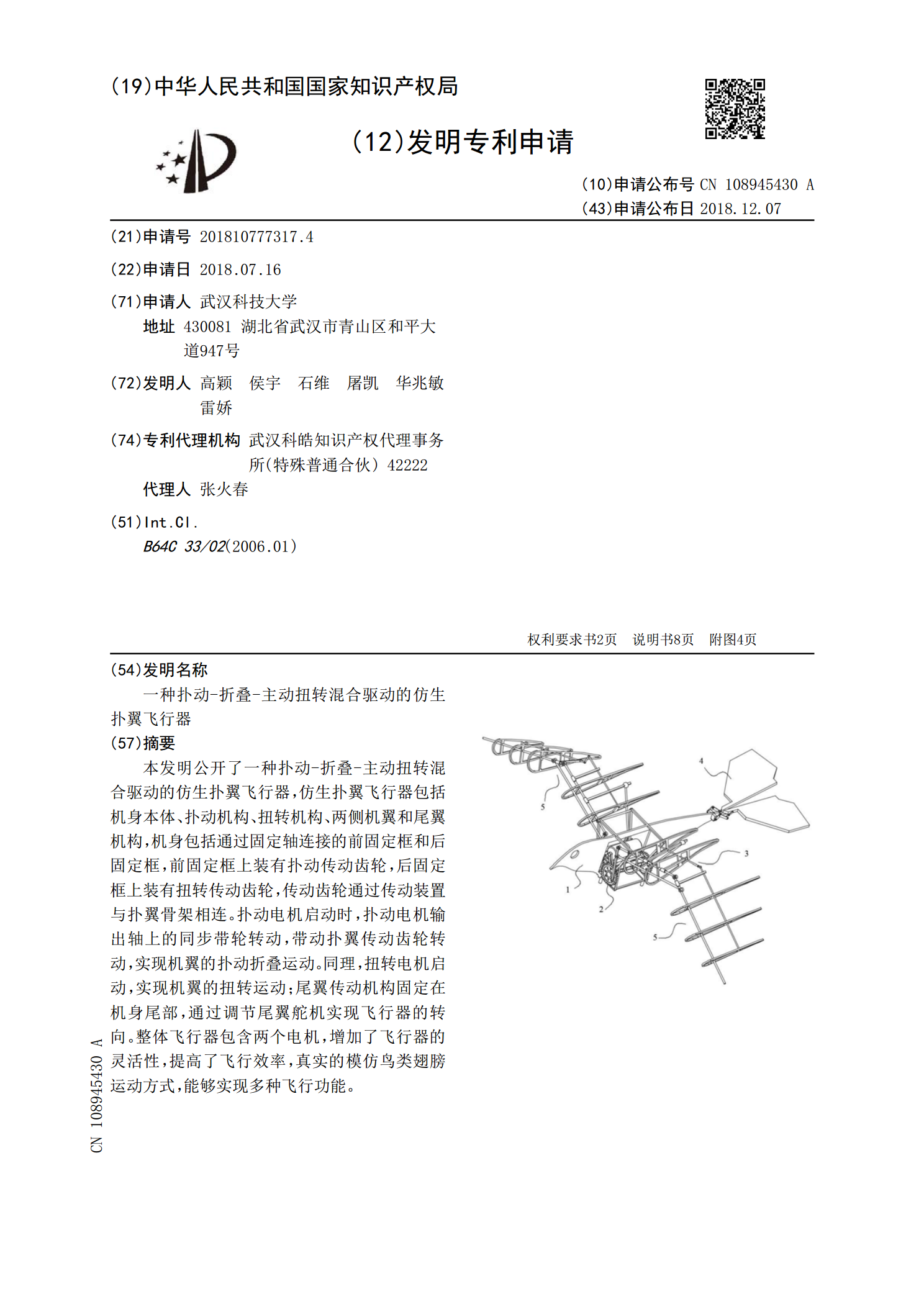
本发明公开了一种扑动‑折叠‑主动扭转混合驱动的仿生扑翼飞行器,仿生扑翼飞行器包括机身本体、扑动机构、扭转机构、两侧机翼和尾翼机构,机身包括通过固定轴连接的前固定框和后固定框,前固定框上装有扑动传动齿轮,后固定框上装有扭转传动齿轮,传动齿轮通过传动装置与扑翼骨架相连。扑动电机启动时,扑动电机输出轴上的同步带轮转动,带动扑翼传动齿轮转动,实现机翼的扑动折叠运动。同理,扭转电机启动,实现机翼的扭转运动;尾翼传动机构固定在机身尾部,通过调节尾翼舵机实现飞行器的转向。整体飞行器包含两个电机,增加了飞行器的灵活性,提
一种仿生扑翼飞行器.pdf
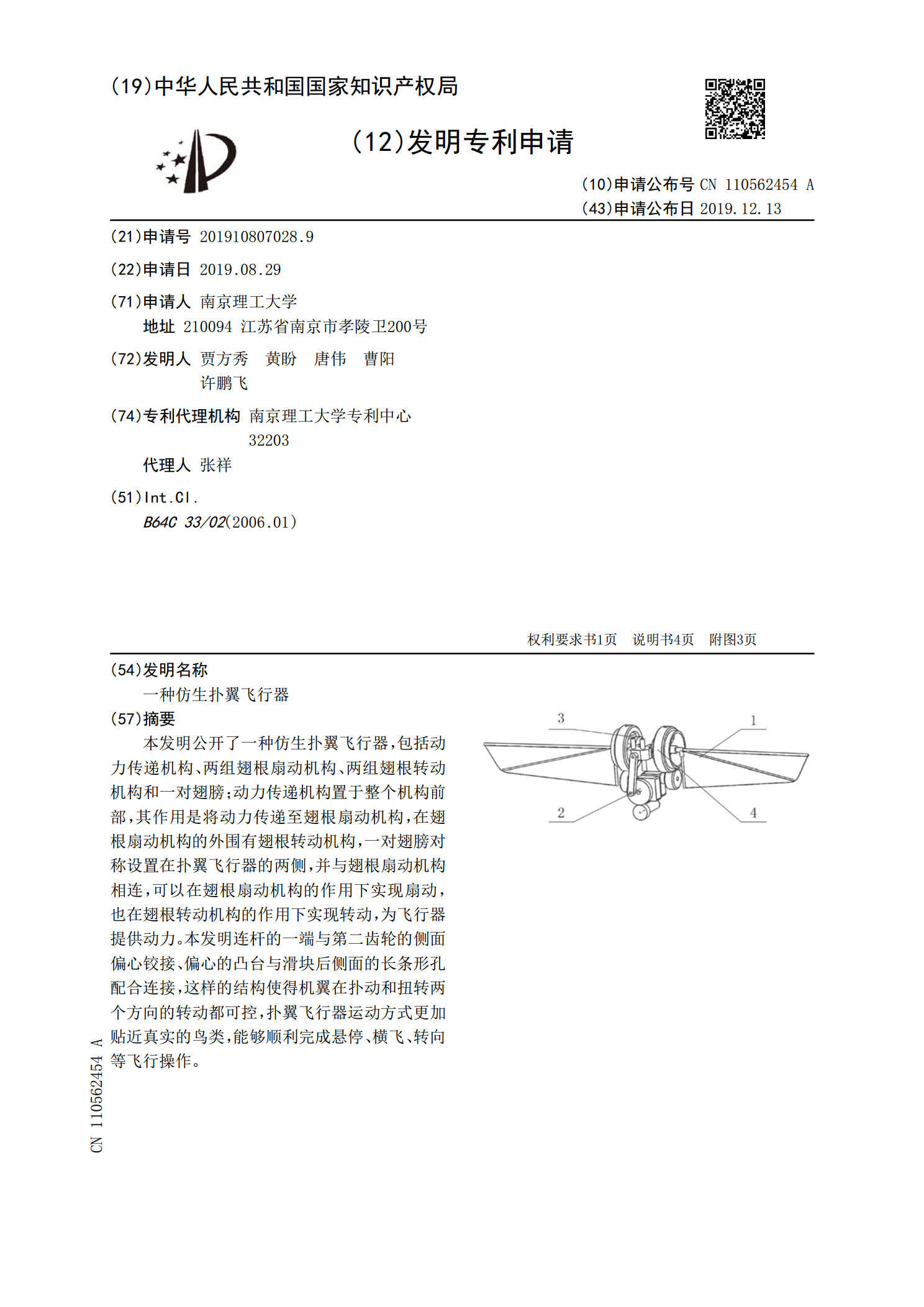
本发明公开了一种仿生扑翼飞行器,包括动力传递机构、两组翅根扇动机构、两组翅根转动机构和一对翅膀;动力传递机构置于整个机构前部,其作用是将动力传递至翅根扇动机构,在翅根扇动机构的外围有翅根转动机构,一对翅膀对称设置在扑翼飞行器的两侧,并与翅根扇动机构相连,可以在翅根扇动机构的作用下实现扇动,也在翅根转动机构的作用下实现转动,为飞行器提供动力。本发明连杆的一端与第二齿轮的侧面偏心铰接、偏心的凸台与滑块后侧面的长条形孔配合连接,这样的结构使得机翼在扑动和扭转两个方向的转动都可控,扑翼飞行器运动方式更加贴近真实的
仿生扑翼飞行器.pdf
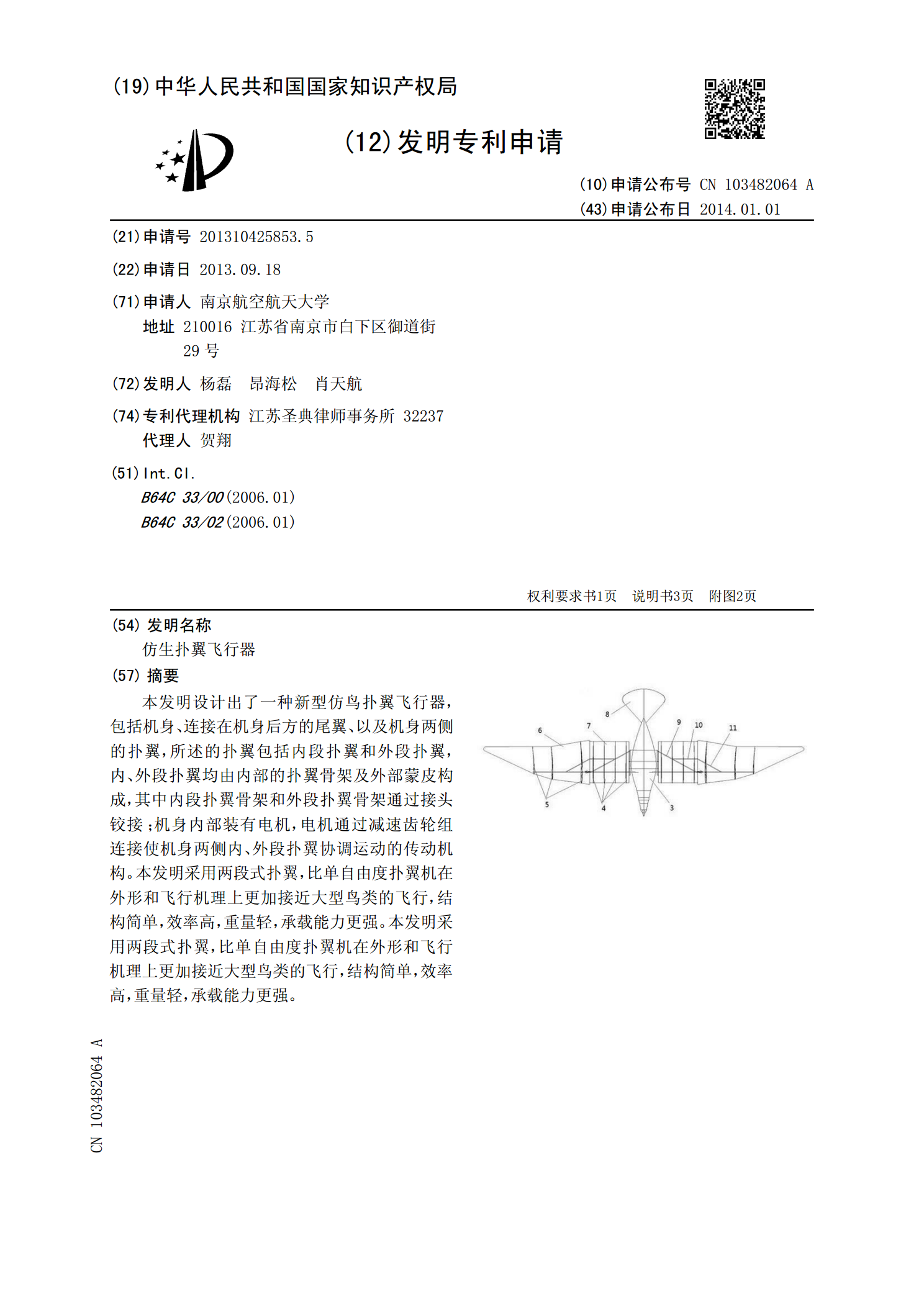
本发明设计出了一种新型仿鸟扑翼飞行器,包括机身、连接在机身后方的尾翼、以及机身两侧的扑翼,所述的扑翼包括内段扑翼和外段扑翼,内、外段扑翼均由内部的扑翼骨架及外部蒙皮构成,其中内段扑翼骨架和外段扑翼骨架通过接头铰接;机身内部装有电机,电机通过减速齿轮组连接使机身两侧内、外段扑翼协调运动的传动机构。本发明采用两段式扑翼,比单自由度扑翼机在外形和飞行机理上更加接近大型鸟类的飞行,结构简单,效率高,重量轻,承载能力更强。本发明采用两段式扑翼,比单自由度扑翼机在外形和飞行机理上更加接近大型鸟类的飞行,结构简单,效率