
一种复杂背景下无人机运动目标检测方法.pdf

美丽****ka

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种复杂背景下无人机运动目标检测方法.pdf
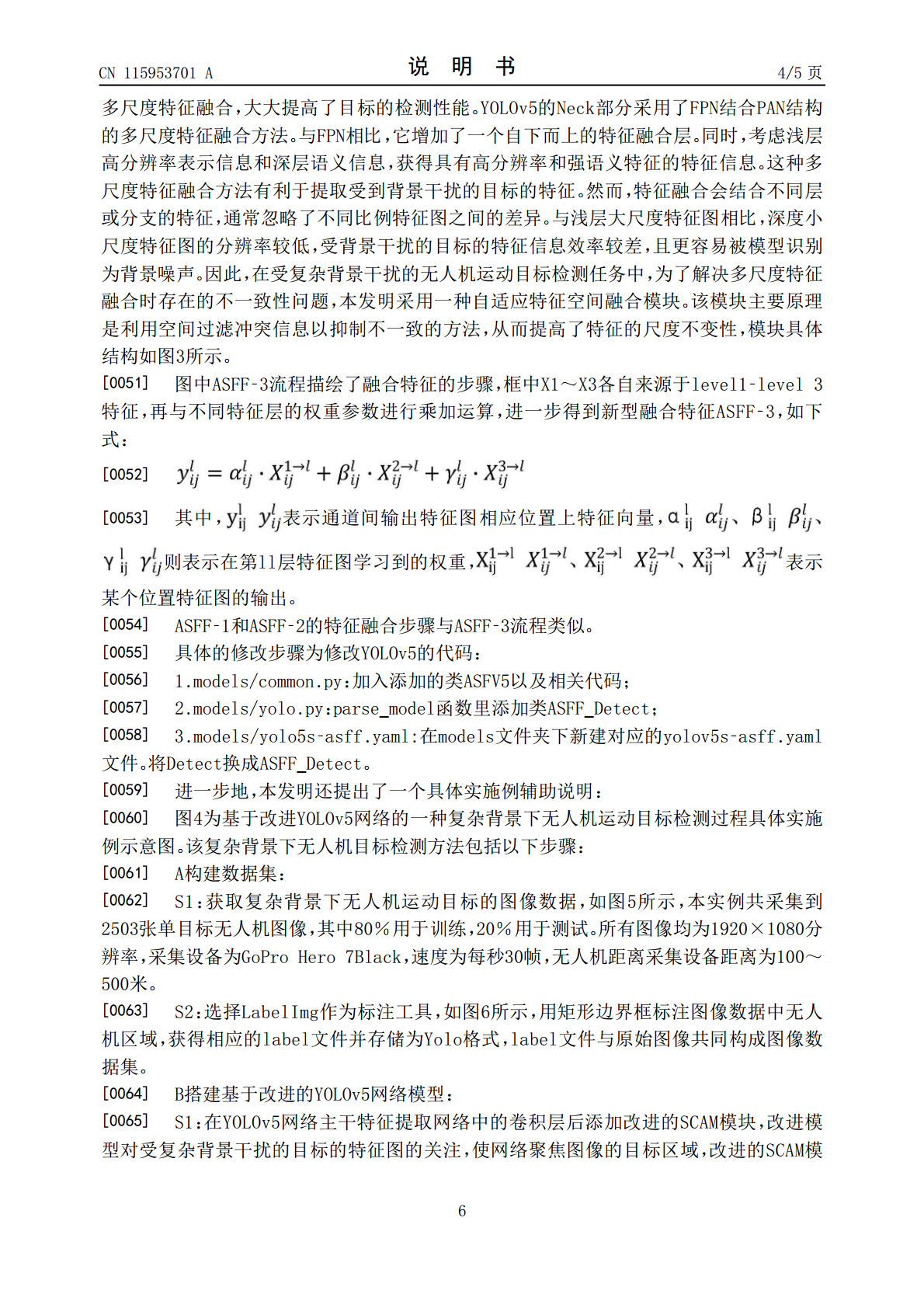
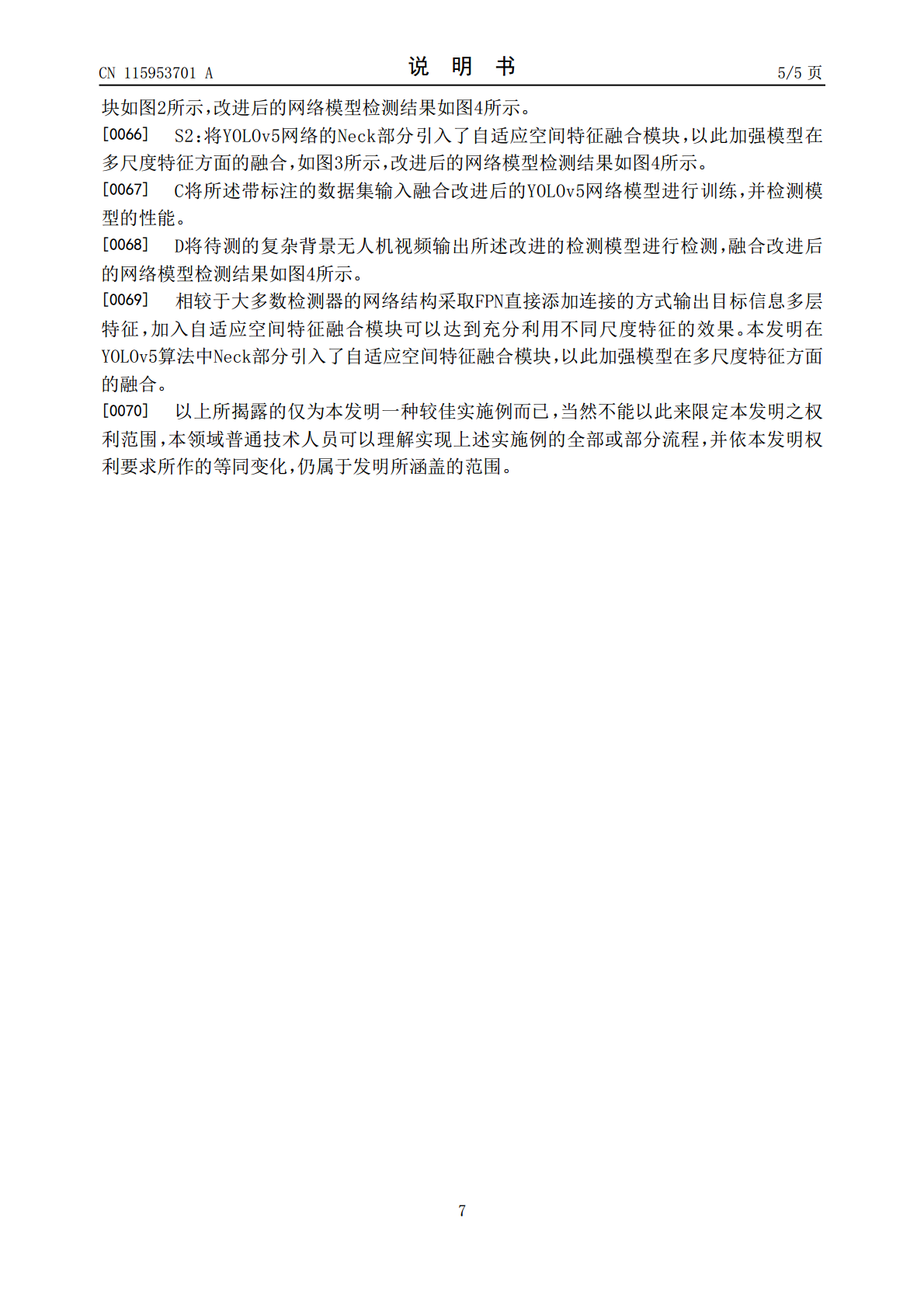
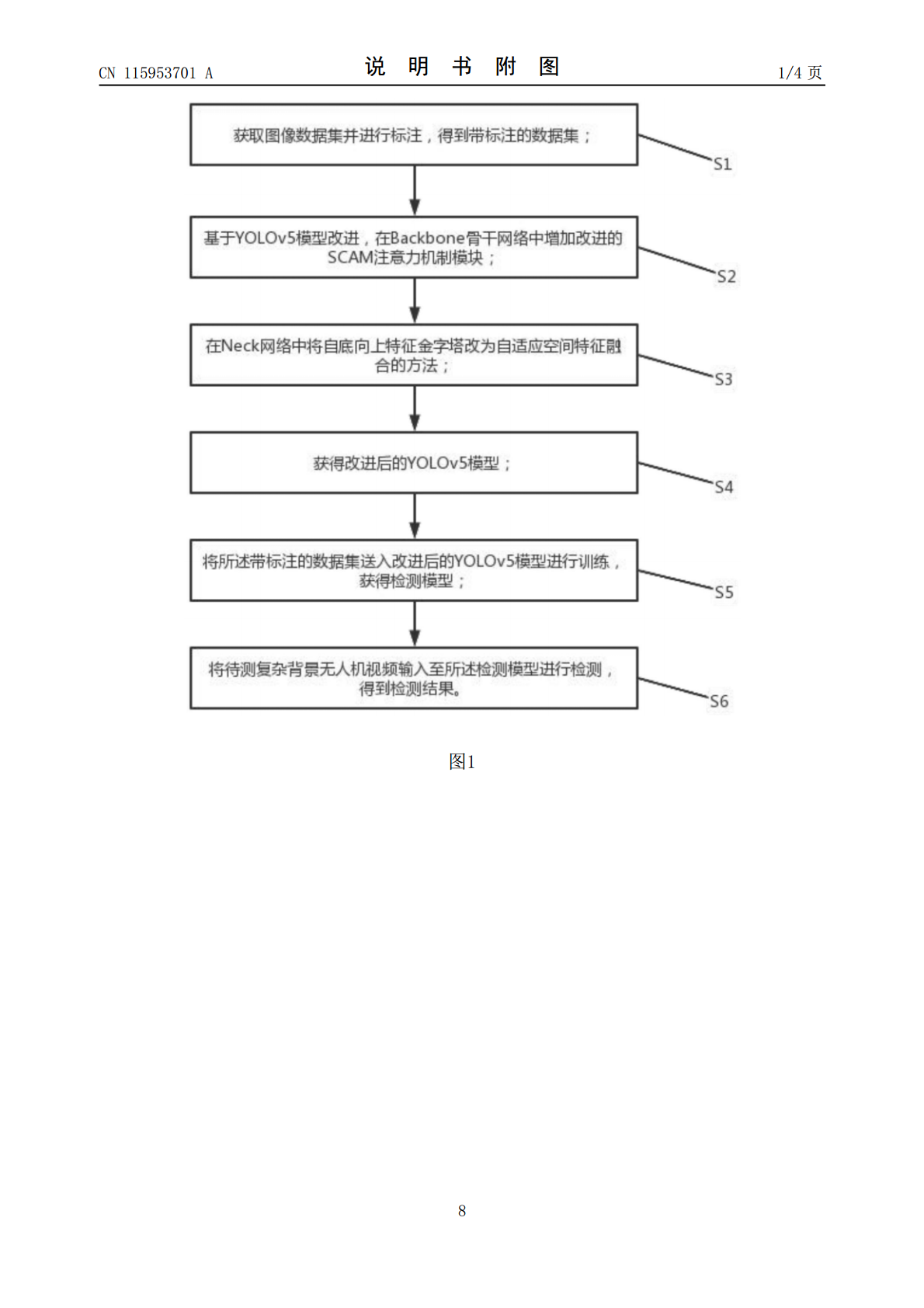
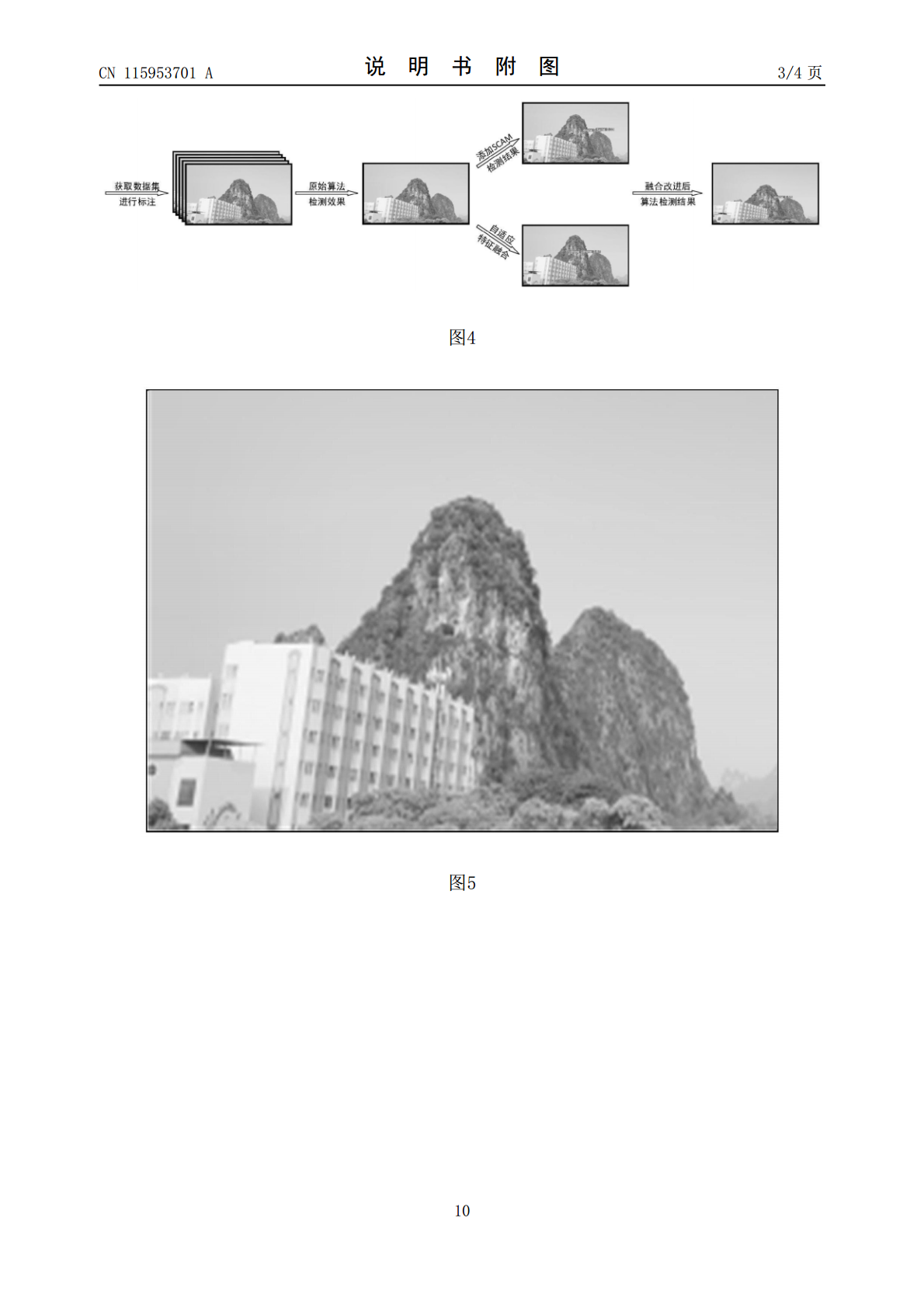
本发明涉及运动目标检测技术领域,具体涉及一种复杂背景下无人机运动目标检测方法,通过将空间注意模块和通道注意模块结合,再改变空间注意模块和通道注意模块之间的连接结构,提出了一种改进的SCAM注意力机制模块,并将该结构插入YOLOv5的网络模型中,来提高模型对特征图中运动目标与背景聚焦区域的注意,同时将原始YOLOv5的Neck网络中将自底向上特征金字塔改为自适应空间特征融合的方法;强化原模型在复杂场景下的特征提取能力和特征融合效率,从而提高复杂背景干扰下目标的检测精度,最后使用训练后的检测模型进行检测,实现

复杂背景下运动目标检测方法研究的开题报告.docx
复杂背景下运动目标检测方法研究的开题报告一、研究背景及意义运动目标检测是计算机视觉领域的重要研究方向之一,其应用范围广泛,包括智慧交通、视频监控、虚拟现实等领域。然而,在实际应用中,由于环境复杂、光照变化、噪声干扰等因素,对于选用先进的运动目标检测方法来说,仍然存在许多困难和挑战。因此,本文提出了一种新的方法来解决这些难题。二、研究内容及方法本文的研究对象是复杂背景下的运动目标检测。本文首先对现有的运动目标检测方法进行了深入的研究,包括基于深度学习、基于传统机器学习、基于强化学习等方法。然后,基于这些方法

一种针对复杂背景的运动目标检测方法.pdf
一种针对复杂背景的运动目标检测方法,涉及一种针对复杂背景中动目标的检测,解决了现有的检测方法在复杂条件下的适应性差、鲁棒性差的问题。其方法:获取待测场景的视频的M帧场景图像,并作帧间差分,对于每个像素点的差分序列建立混合高斯模型;设置混合高斯模型的虚警率,计算每个像素点的检测门限;根据检测门限对每帧场景图像中的每一个像素点做二值化处理,获得运动目标的轮廓。本发明适用于复杂背景下的运动目标检测。

一种复杂背景场景中运动目标检测方法.pdf
在对图像进行运动目标检测时,背景越复杂,检测难度越高,获得的检测结果准确性越低,本发明提出一种复杂背景场景中运动目标检测方法,该方法使用自适应高斯混合模型对视频帧图像进行检测,获得包含前景目标和大量噪声的检测图像;再通过训练BP神经网络,采用训练好的BP神经网络对检测图像的各个部分进行判别,排除非前景目标区域;最后采用中值滤波方法对保留的前景目标区域中的孤立噪声点进行进一步修正,获得最后的检测图像。本发明提出的方法可以获得获准确度高、噪声小、边缘明确的前景目标,同时具有鲁棒性高、训练速度快等特点。

复杂背景下的运动目标检测研究的开题报告.docx
复杂背景下的运动目标检测研究的开题报告一、课题背景和意义目标检测作为计算机视觉领域的重要一环,由于其在实际应用中的功能广泛,近年来得到了广泛的关注和研究。其在交通、安防、无人机等领域中的应用需求愈发增长,面对复杂交通环境下的目标检测、识别,其效果直接关系到后续决策和应用效果。然而,在实际应用中,由于运动目标经常处于交通、室外、嘈杂的复杂背景下,其检测难度更高,因此在复杂背景下的运动目标检测一直是目标检测中一个重要的研究方向。该方向的研究对于提高目标检测的精度和实用性有着重要意义。二、研究内容和方法本课题的