
一种桥式起重机的吊臂可限位回转装置.pdf

一吃****福乾

1/7

2/7

3/7

4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种桥式起重机的吊臂可限位回转装置.pdf
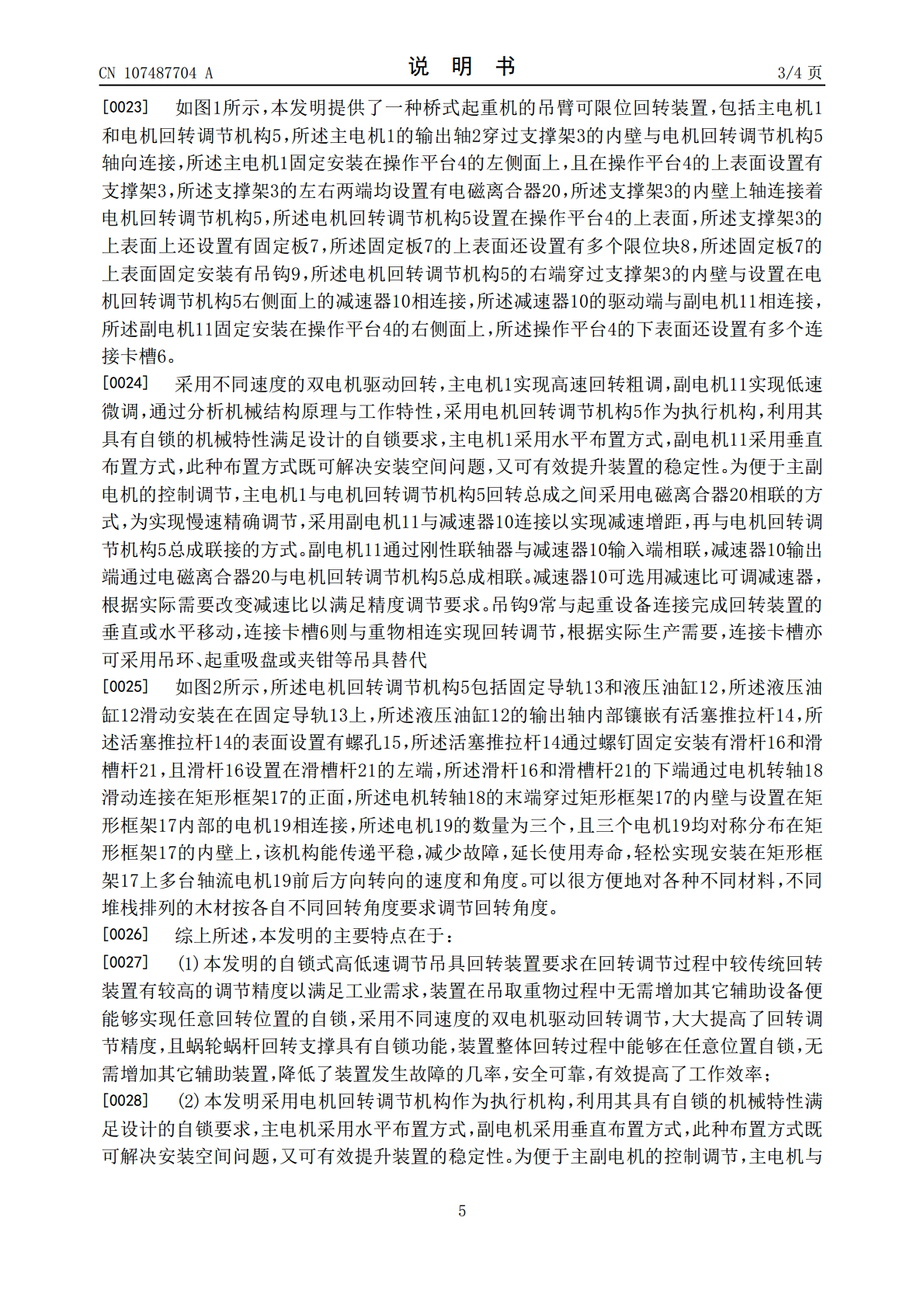
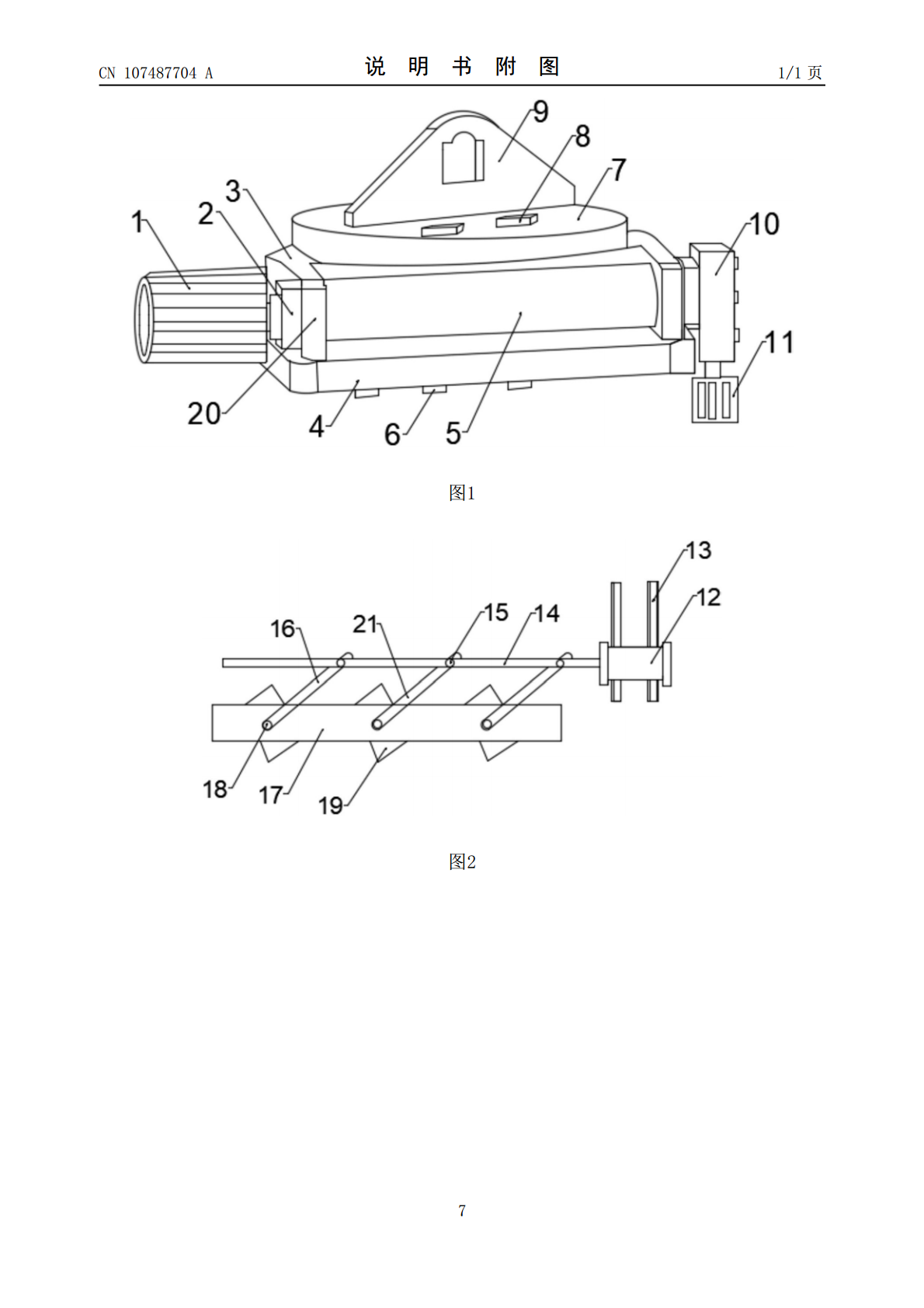
本发明公开了一种桥式起重机的吊臂可限位回转装置,包括主电机和电机回转调节机构,所述主电机固定安装在操作平台的左侧面上,且在操作平台的上表面设置有支撑架,所述支撑架的左右两端均设置有电磁离合器,所述支撑架的内壁上轴连接着电机回转调节机构,所述电机回转调节机构的右端穿过支撑架的内壁与设置在电机回转调节机构右侧面上的减速器相连接,所述减速器的驱动端与副电机相连接,采用不同速度的双电机驱动回转调节,大大提高了回转调节精度,且蜗轮蜗杆回转支撑具有自锁功能,装置整体回转过程中能够在任意位置自锁,无需增加其它辅助装置,

一种回转式限位装置.pdf
本发明公开了一种洗车机上用的用来限定摆臂位置的回转式限位装置,包括固定板和限位块;所述固定板可旋转地固定安装在洗车机的底板上;所述限位块固定在固定板上靠近摆臂的侧面上;所述限位块通过固定板的旋转调节后,固定在洗车机的底板上。本发明方案采用固定板的回转式设计,根据洗车机中各个摆臂幅度、角度的不同,调节好限位块的角度后,固定在洗车机的底板上,不仅方便了限位装置的制作和安装,提高了工作效率;而且也避免了因角度不吻合,限位块与摆臂间留有夹角,而造成的返工现象和限位效果不佳的情况出现。
一种可自由伸缩的吊臂装置.pdf
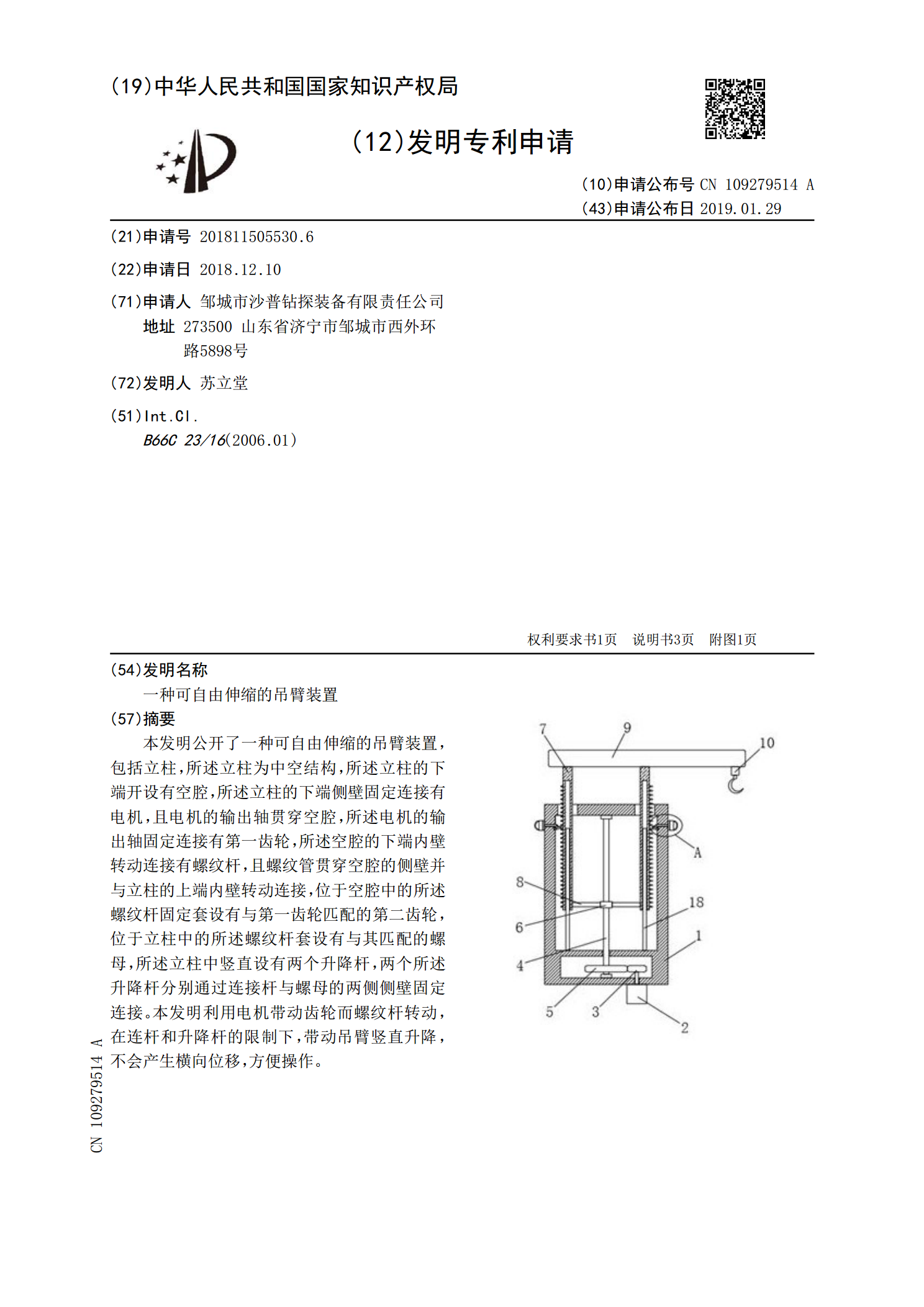
本发明公开了一种可自由伸缩的吊臂装置,包括立柱,所述立柱为中空结构,所述立柱的下端开设有空腔,所述立柱的下端侧壁固定连接有电机,且电机的输出轴贯穿空腔,所述电机的输出轴固定连接有第一齿轮,所述空腔的下端内壁转动连接有螺纹杆,且螺纹管贯穿空腔的侧壁并与立柱的上端内壁转动连接,位于空腔中的所述螺纹杆固定套设有与第一齿轮匹配的第二齿轮,位于立柱中的所述螺纹杆套设有与其匹配的螺母,所述立柱中竖直设有两个升降杆,两个所述升降杆分别通过连接杆与螺母的两侧侧壁固定连接。本发明利用电机带动齿轮而螺纹杆转动,在连杆和升降杆

一种防止回转起重机吊臂滑落装置.pdf
本发明公开了一种防止回转起重机吊臂滑落装置,它包括底座,所述的底座的上端安装有转台,所述的转台的上端通过销轴连接有吊臂,所述的吊臂的上端通过轴承座安装有卷筒,所述的卷筒上安装有钢丝绳,所述的钢丝绳远离卷筒的一端通过导向轮连接有吊钩,所述的导向轮安装在吊臂的右端,所述的吊臂的下端连接有支撑油缸的活塞杆,所述的支撑油缸的缸体固定安装在转台的右侧面下部,所述的转台的右侧面中部固定连接有支撑台,所述的支撑台的上端连接有升降油缸,所述的升降油缸的活塞杆上端固定安装有支撑板,所述的支撑板的上端铰接有铰接座,所述的铰接

克令吊用吊臂变幅限位装置.pdf
一种克令吊用吊臂变幅限位装置,包括底座,底座上通过回转支承安装有塔身,塔身的顶部铰接有吊臂,吊臂上部安装有起升绞车,起升绞车通过钢丝绳与吊臂头部的吊钩连接;位于塔身上还安装有限位装置,限位装置的结构为:包括固定座,固定座的中部通过第二铰链安装有手柄,手柄上安装蜗杆,位于固定座的一端通过紧固件安装有感应器,感应器上通过第一铰链安装有触杆,感应器的一端还安装有固定块。本发明结构紧凑、合理,通过蜗轮蜗杆机构控制吊臂的起升幅度,同时通过操作手柄过程中,手柄与触点接触时为吊臂起升极限位置,感应器控制吊臂不再继续上升