
手术辅助支撑架.pdf

努力****凌芹

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
手术辅助支撑架.pdf
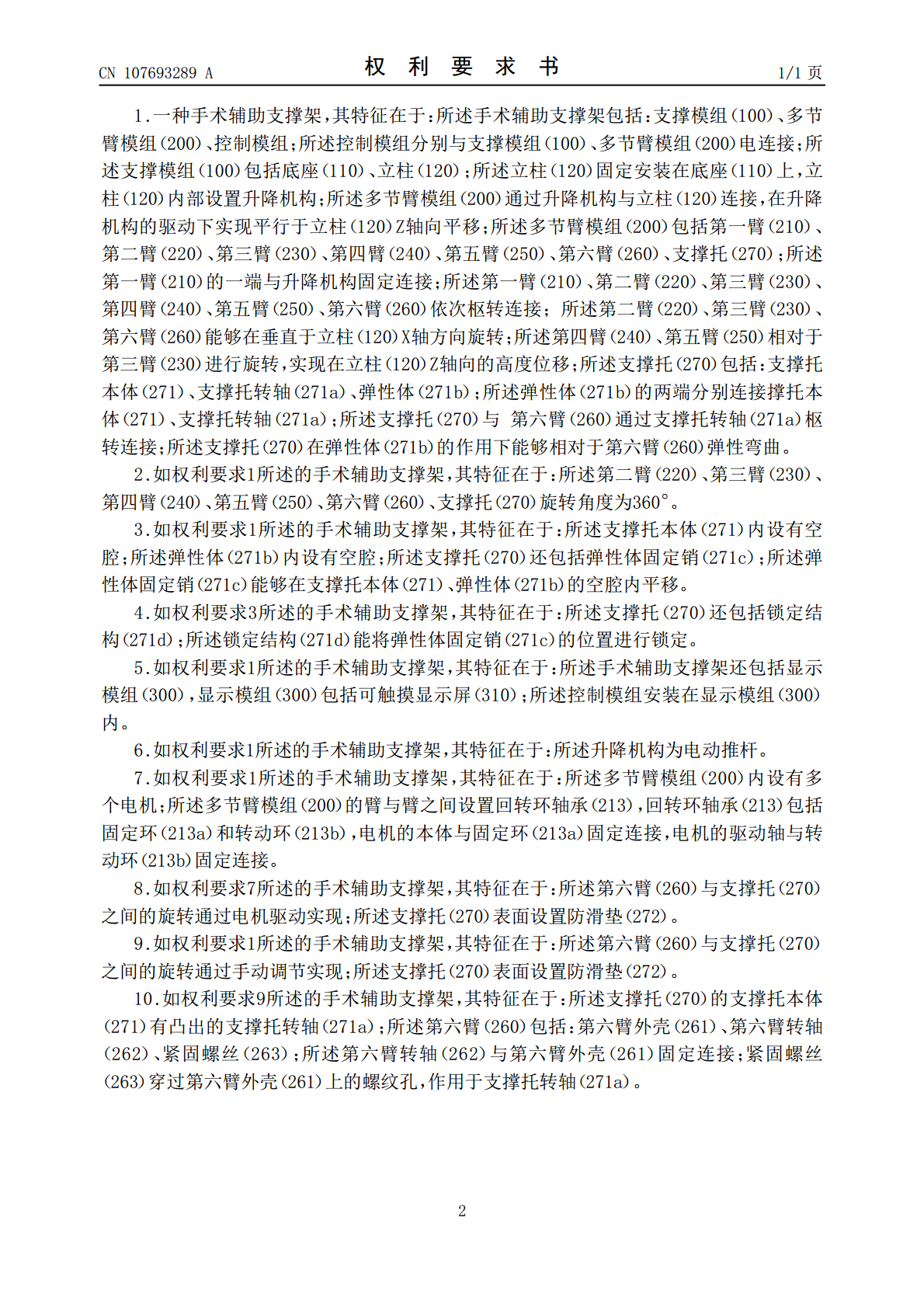
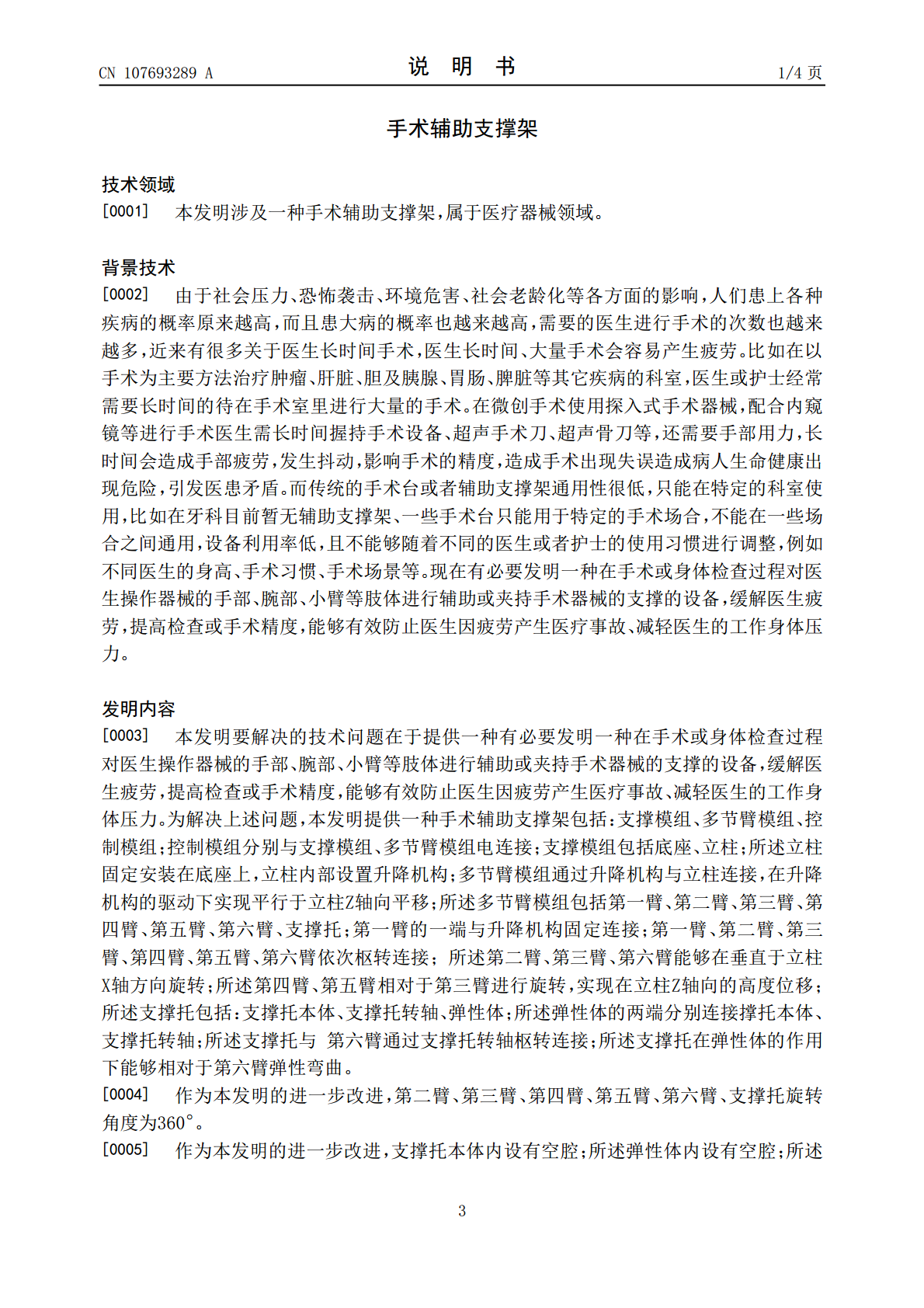
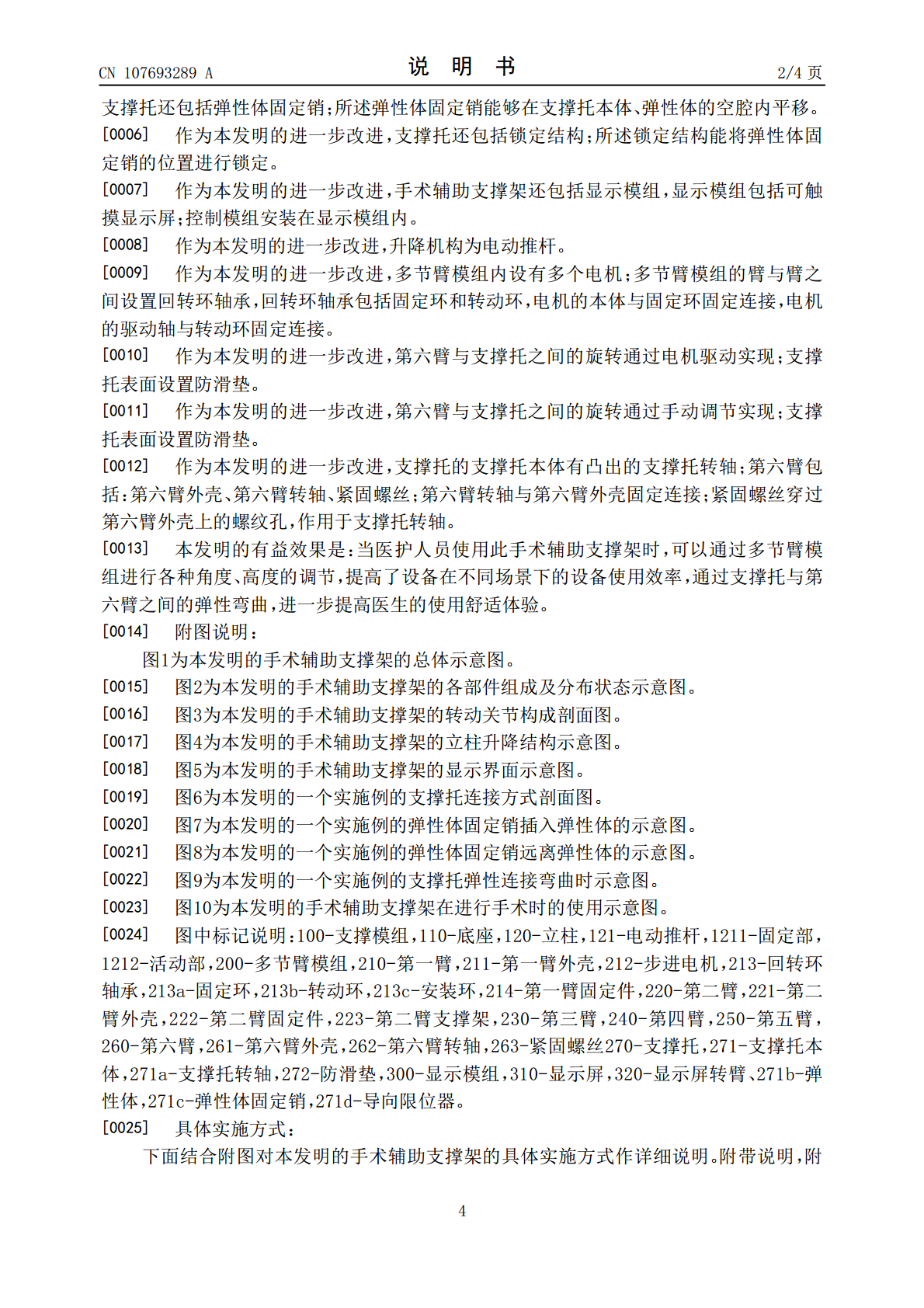
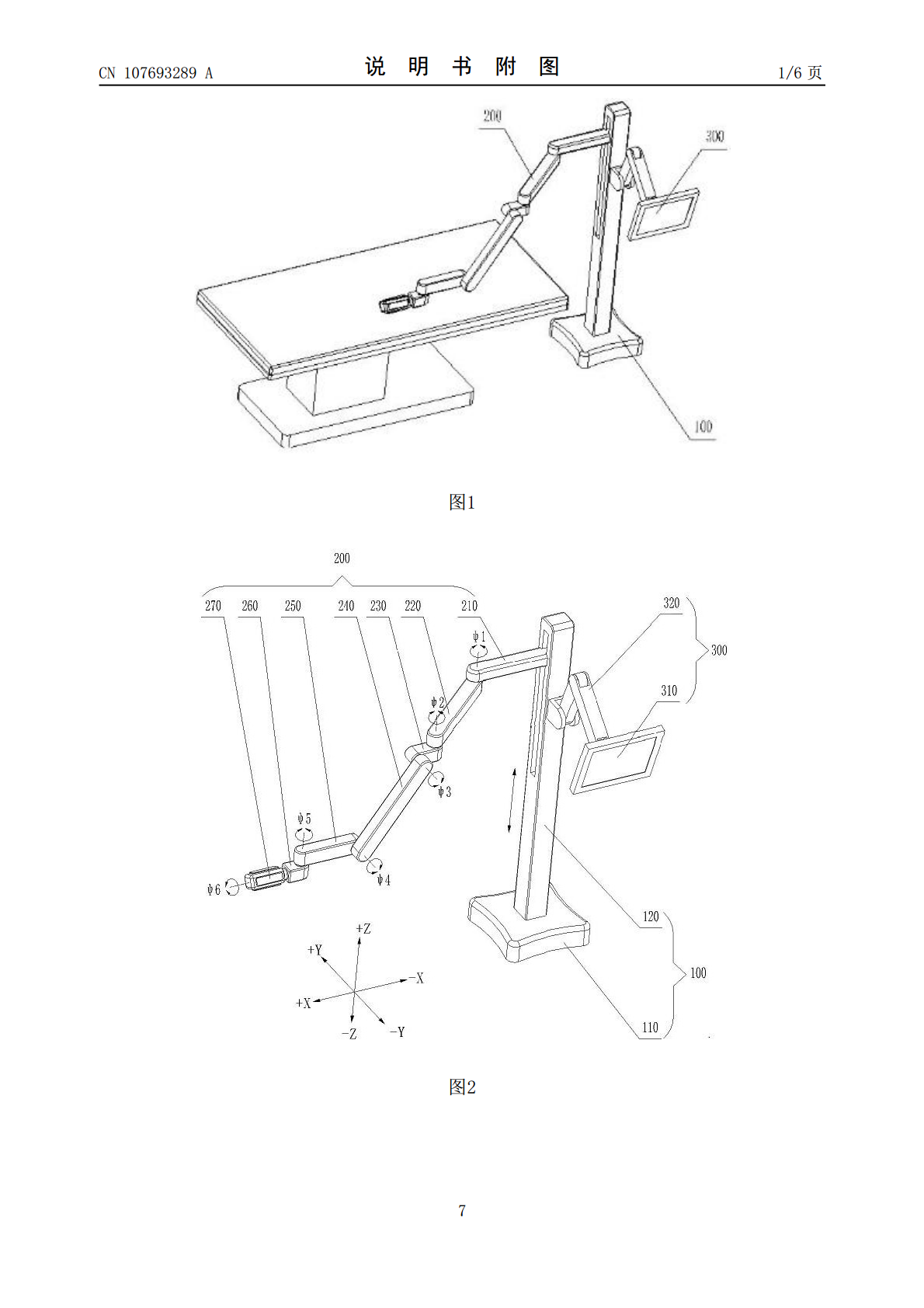
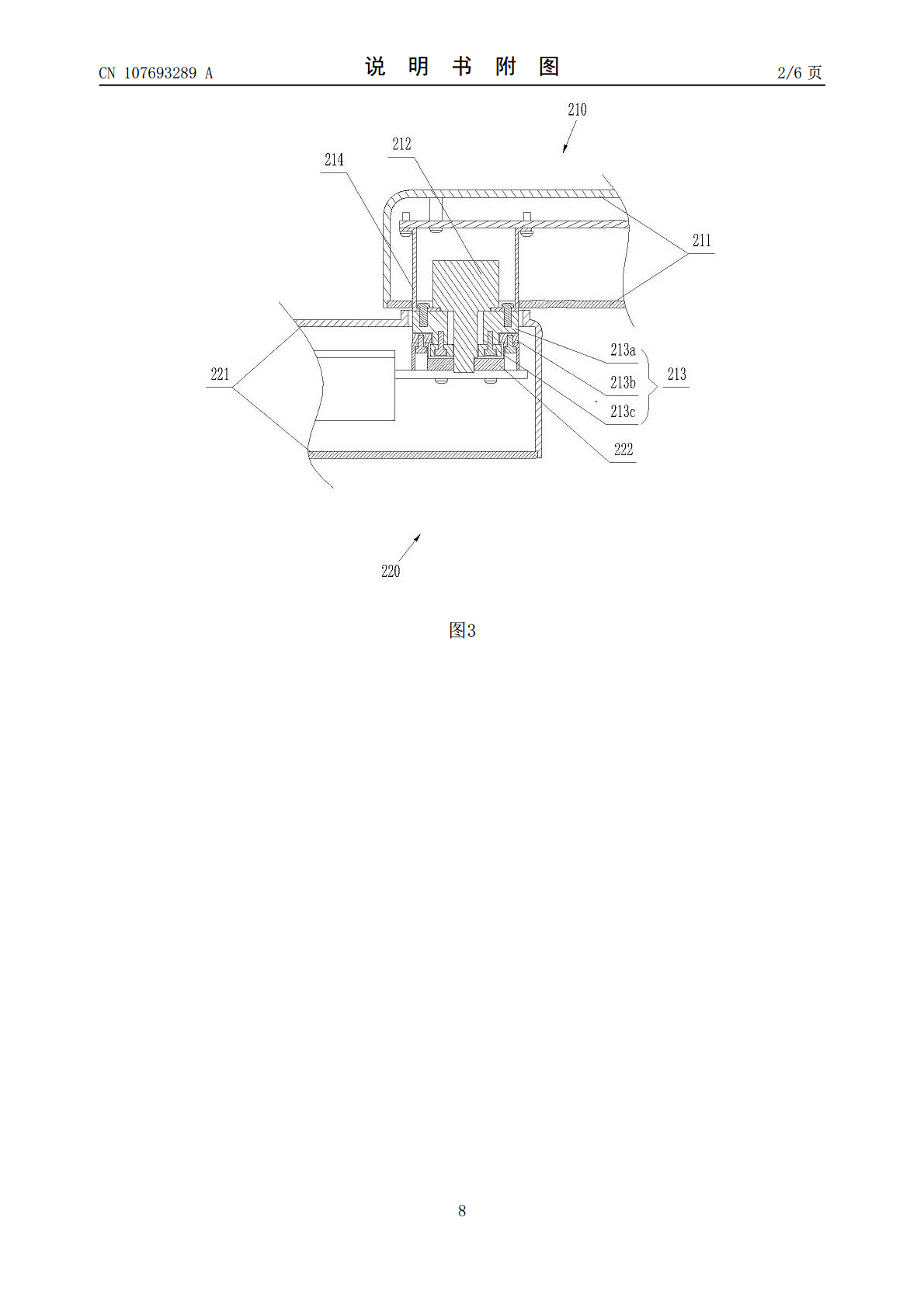
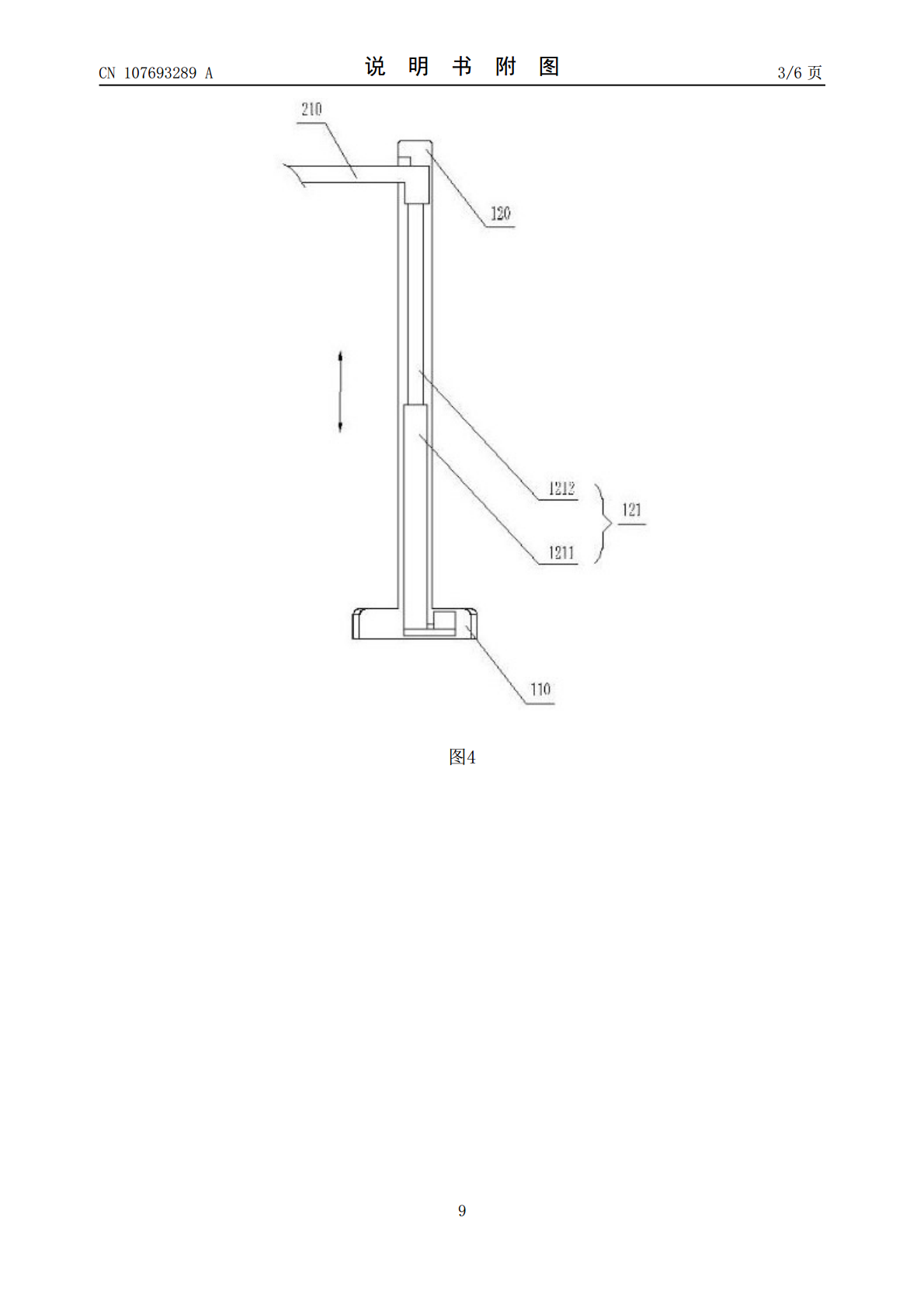
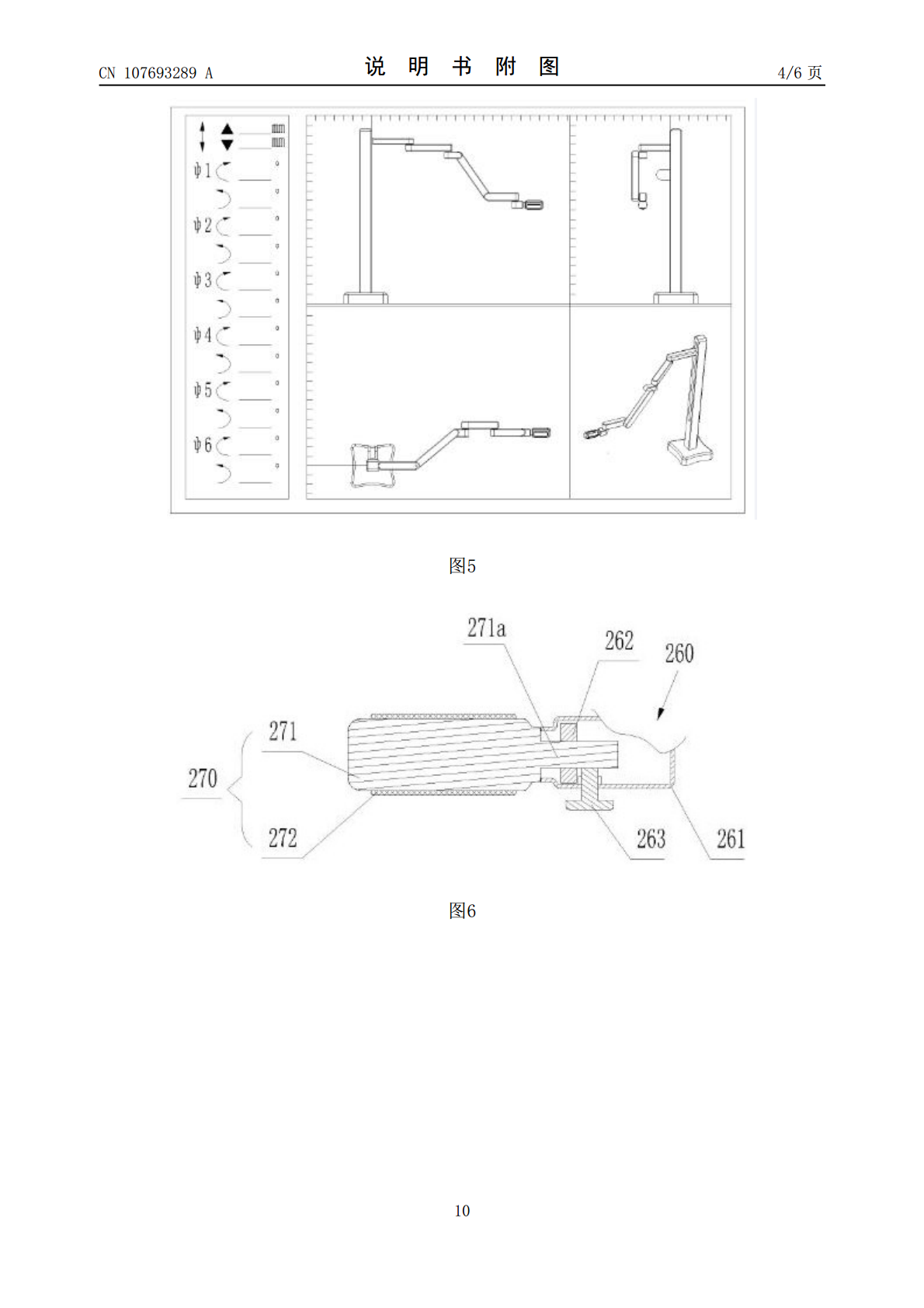
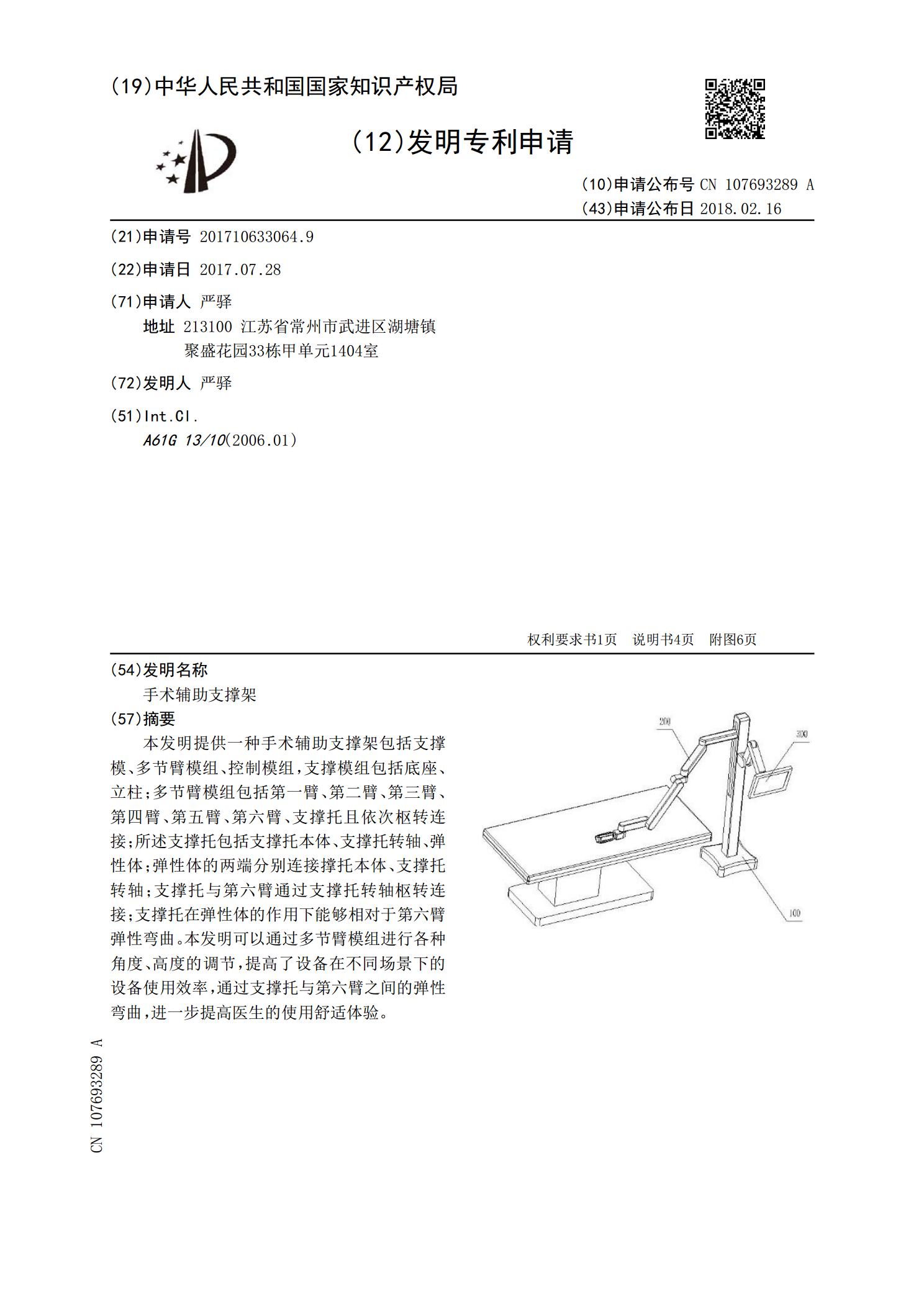
本发明提供一种手术辅助支撑架包括支撑模、多节臂模组、控制模组,支撑模组包括底座、立柱;多节臂模组包括第一臂、第二臂、第三臂、第四臂、第五臂、第六臂、支撑托且依次枢转连接;所述支撑托包括支撑托本体、支撑托转轴、弹性体;弹性体的两端分别连接撑托本体、支撑托转轴;支撑托与第六臂通过支撑托转轴枢转连接;支撑托在弹性体的作用下能够相对于第六臂弹性弯曲。本发明可以通过多节臂模组进行各种角度、高度的调节,提高了设备在不同场景下的设备使用效率,通过支撑托与第六臂之间的弹性弯曲,进一步提高医生的使用舒适体验。
基于眼科医生手术用辅助支撑架.pdf
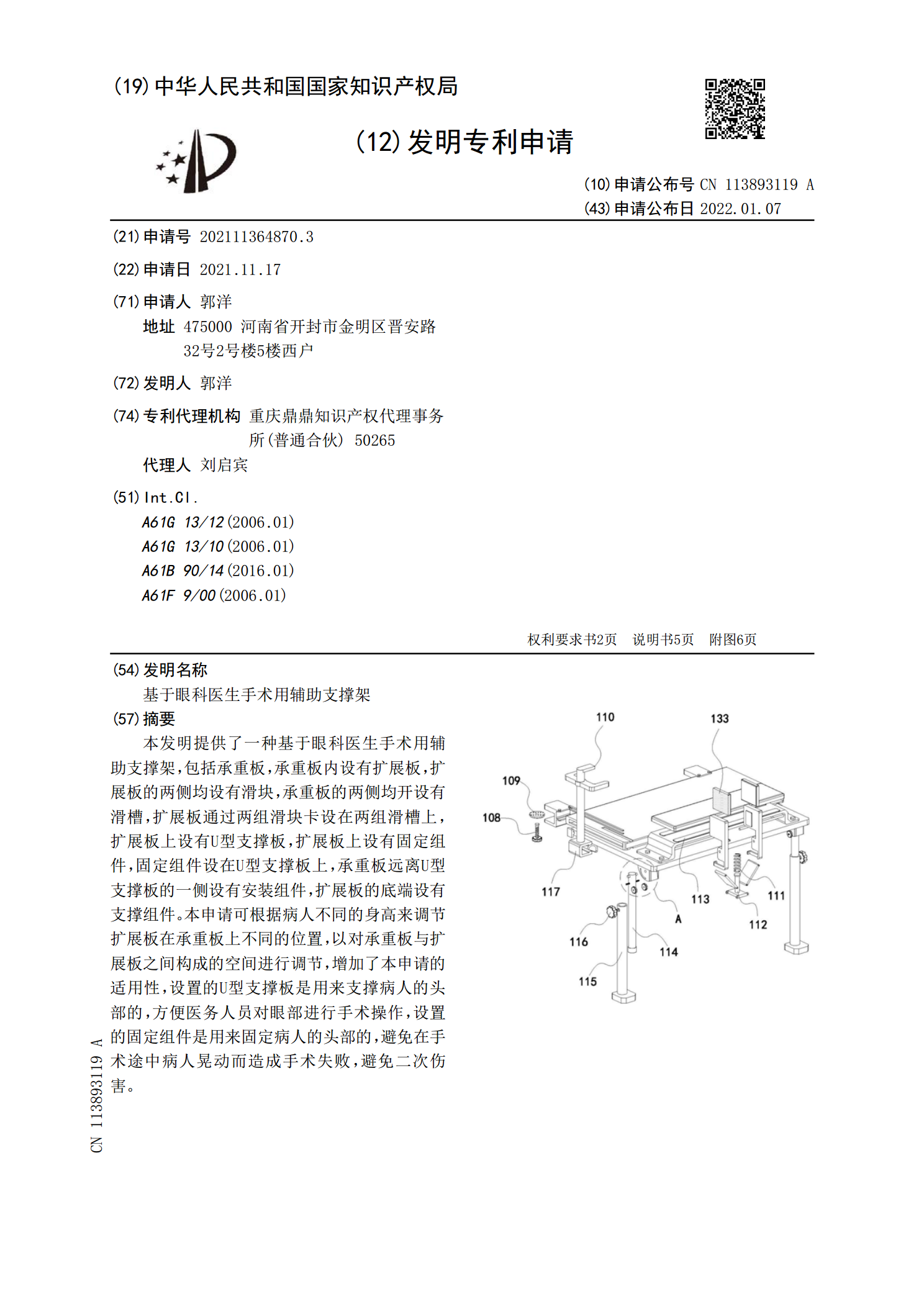
本发明提供了一种基于眼科医生手术用辅助支撑架,包括承重板,承重板内设有扩展板,扩展板的两侧均设有滑块,承重板的两侧均开设有滑槽,扩展板通过两组滑块卡设在两组滑槽上,扩展板上设有U型支撑板,扩展板上设有固定组件,固定组件设在U型支撑板上,承重板远离U型支撑板的一侧设有安装组件,扩展板的底端设有支撑组件。本申请可根据病人不同的身高来调节扩展板在承重板上不同的位置,以对承重板与扩展板之间构成的空间进行调节,增加了本申请的适用性,设置的U型支撑板是用来支撑病人的头部的,方便医务人员对眼部进行手术操作,设置的固定组
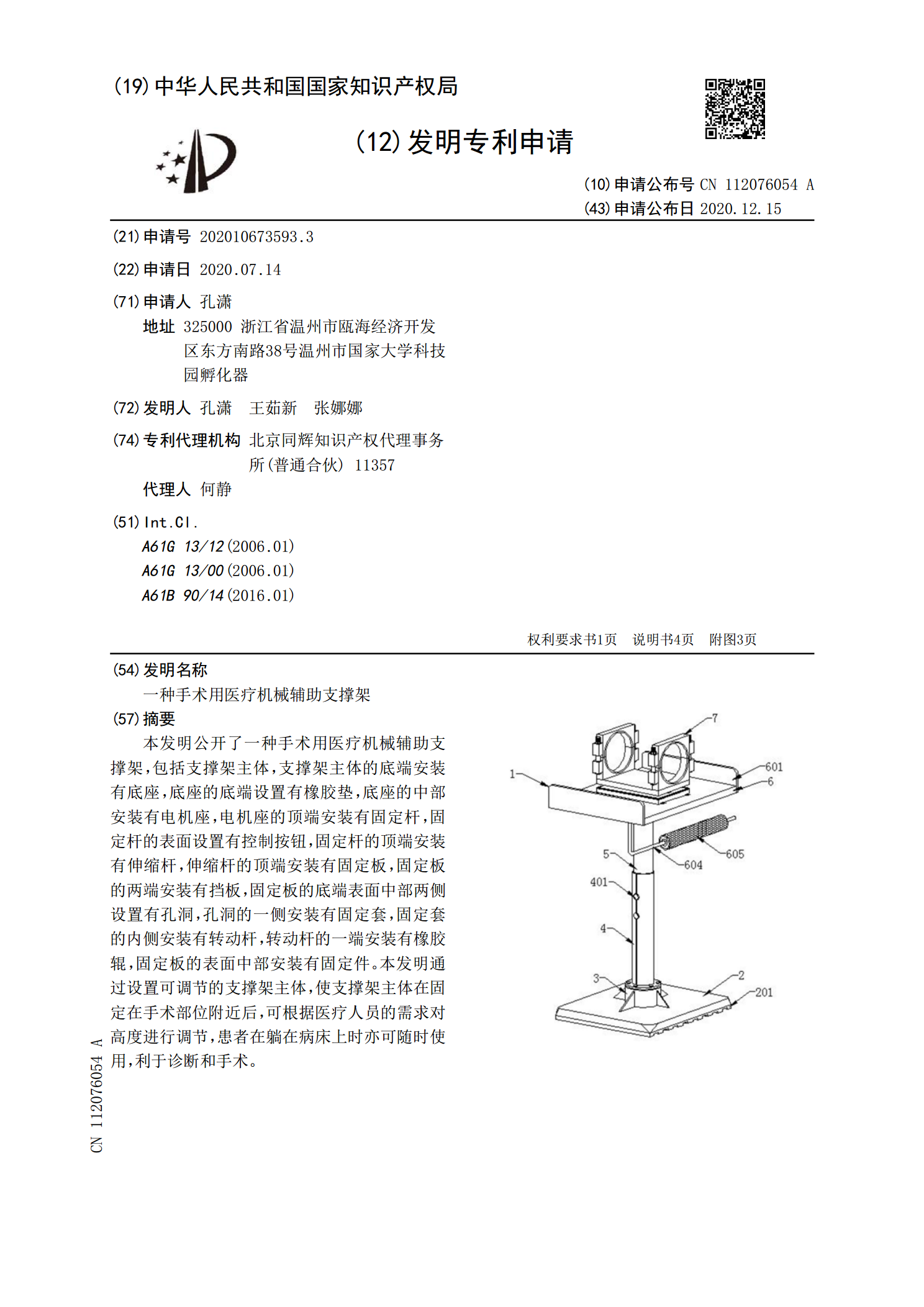
一种手术用医疗机械辅助支撑架.pdf
本发明公开了一种手术用医疗机械辅助支撑架,包括支撑架主体,支撑架主体的底端安装有底座,底座的底端设置有橡胶垫,底座的中部安装有电机座,电机座的顶端安装有固定杆,固定杆的表面设置有控制按钮,固定杆的顶端安装有伸缩杆,伸缩杆的顶端安装有固定板,固定板的两端安装有挡板,固定板的底端表面中部两侧设置有孔洞,孔洞的一侧安装有固定套,固定套的内侧安装有转动杆,转动杆的一端安装有橡胶辊,固定板的表面中部安装有固定件。本发明通过设置可调节的支撑架主体,使支撑架主体在固定在手术部位附近后,可根据医疗人员的需求对高度进行调节
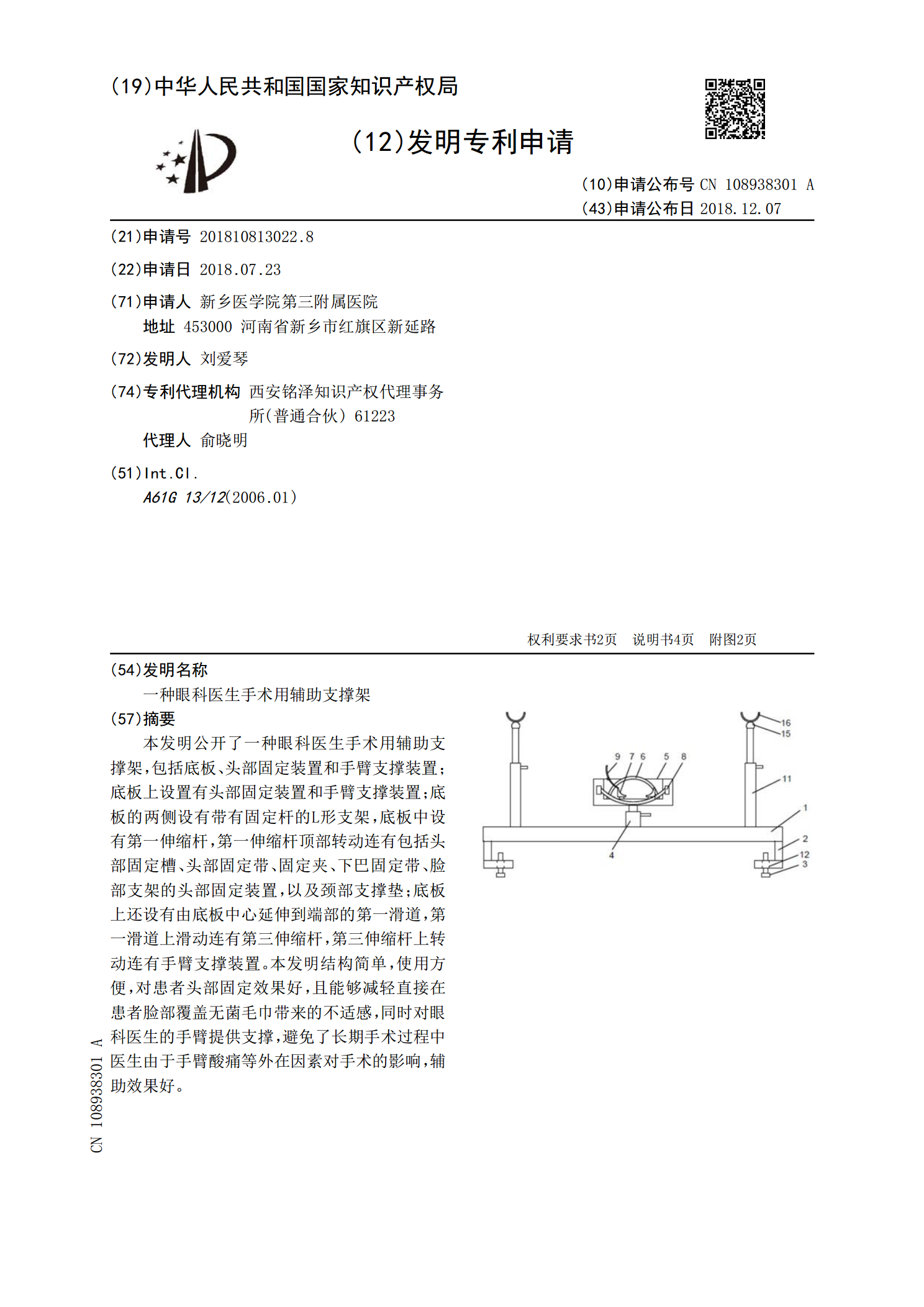
一种眼科医生手术用辅助支撑架.pdf
本发明公开了一种眼科医生手术用辅助支撑架,包括底板、头部固定装置和手臂支撑装置;底板上设置有头部固定装置和手臂支撑装置;底板的两侧设有带有固定杆的L形支架,底板中设有第一伸缩杆,第一伸缩杆顶部转动连有包括头部固定槽、头部固定带、固定夹、下巴固定带、脸部支架的头部固定装置,以及颈部支撑垫;底板上还设有由底板中心延伸到端部的第一滑道,第一滑道上滑动连有第三伸缩杆,第三伸缩杆上转动连有手臂支撑装置。本发明结构简单,使用方便,对患者头部固定效果好,且能够减轻直接在患者脸部覆盖无菌毛巾带来的不适感,同时对眼科医生的
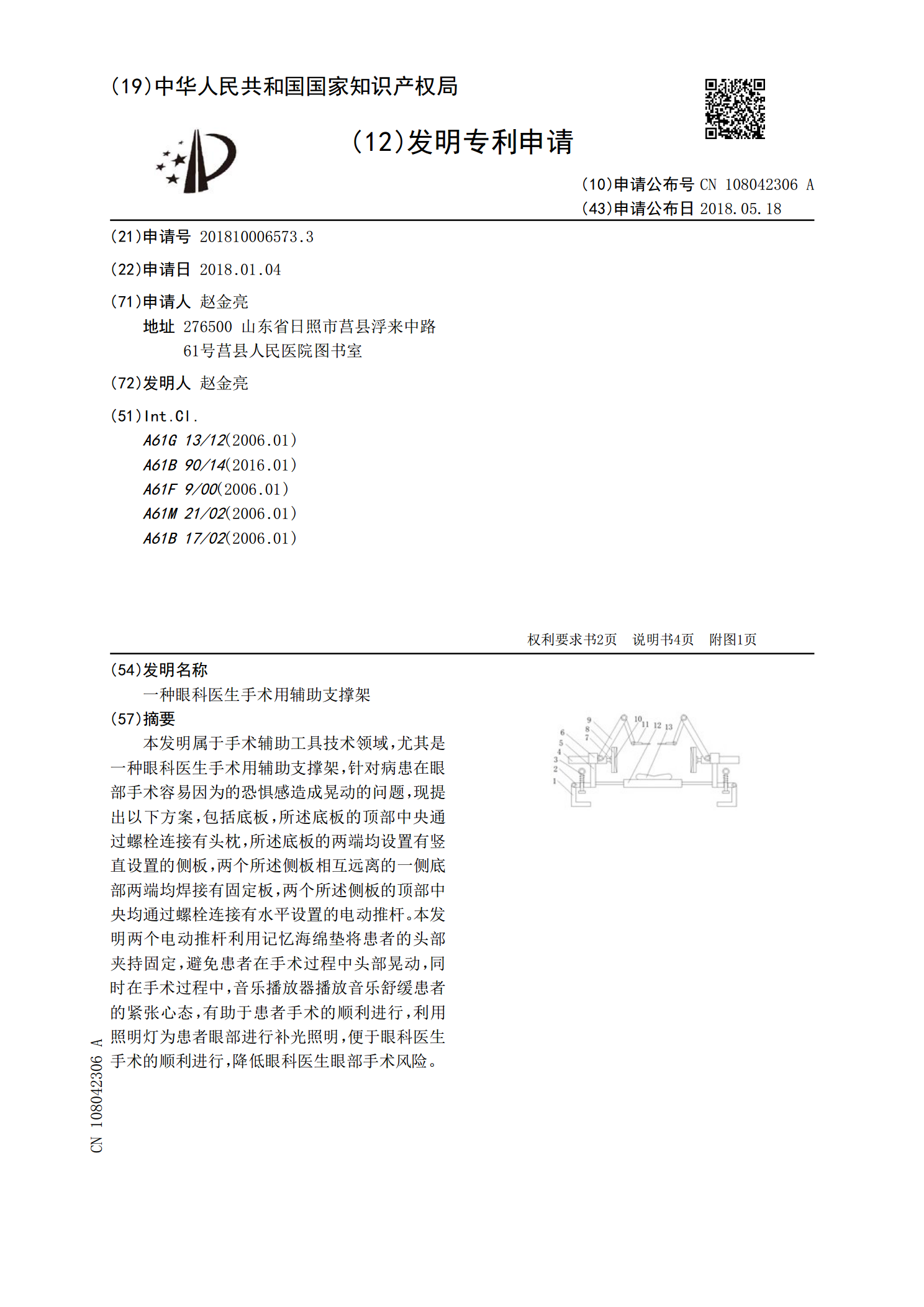
一种眼科医生手术用辅助支撑架.pdf
本发明属于手术辅助工具技术领域,尤其是一种眼科医生手术用辅助支撑架,针对病患在眼部手术容易因为的恐惧感造成晃动的问题,现提出以下方案,包括底板,所述底板的顶部中央通过螺栓连接有头枕,所述底板的两端均设置有竖直设置的侧板,两个所述侧板相互远离的一侧底部两端均焊接有固定板,两个所述侧板的顶部中央均通过螺栓连接有水平设置的电动推杆。本发明两个电动推杆利用记忆海绵垫将患者的头部夹持固定,避免患者在手术过程中头部晃动,同时在手术过程中,音乐播放器播放音乐舒缓患者的紧张心态,有助于患者手术的顺利进行,利用照明灯为患者