
万向滚动的球形机器人.pdf

小云****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

万向滚动球形机器人.pdf
本发明公开了一种万向滚动球形机器人,涉及球形机器人领域。短轴电机和短轴处于球壳中心线,以内框两端为转动支承;长轴经过球壳中心线,与短轴所在的球壳中心线垂直相交于球心;长轴以球壳内侧为转动支承副,长轴上的被动齿轮与长轴电机连接的长轴主动齿轮啮合;方位电机轴线经过球心,惯性轮与方位电机相连接,惯性轮的对称线经过方位电机轴线,短轴和长轴旋转导致惯性轮翻转,实现球形机器人的直线运动,方位电机转动惯性轮实现球形机器人转向控制。本发明三个自由度互相独立,实现了球形机器的全方位移动,实现了球形机器人球面的万向滚动,控制

万向滚动的球形机器人.pdf
本发明公开了一种万向滚动的球形机器人,旨在克服现有技术中存在运行方向受限、不能实现任意方向的滚动、由于搭建平台比较复杂导致稳定性较差与姿态调整精度较差的问题,万向滚动的球形机器人包括壳体部分、中心支撑架(3)、重心移动装置部分和自动控制部分;壳体部分为球形壳体件;中心支撑架(3)呈正方体形的框架式结构件;重心移动装置部分包括6个结构相同的重心移动装置(5);6个结构相同的重心移动装置(5)的内端依次和正方形的中心支撑架(3)的6个平面框架固定连接,壳体部分再套装在已安装在中心支撑架(3)上的6个结构相同的

万向球形自平衡机器人的研究与设计.docx
万向球形自平衡机器人的研究与设计万向球形自平衡机器人的研究与设计随着科技的不断进步,机器人技术越来越成熟,并在各领域和工业中得到广泛应用。其中,自主机器人是一种不需要人为干预就能完成各种任务的机器人。其中,万向球形自平衡机器人是一种非常独特的机器人,在机器人技术领域具有广泛的应用前景。本文将介绍万向球形自平衡机器人的研究与设计。1.万向球形自平衡机器人的原理万向球形自平衡机器人是一种球形机器人,它采用球的机构作为轮子,可以在任何方向上前进。该机器人通常采用陀螺仪作为控制系统,通过保持自身平稳来达到方向控制
万向球形健身器.pdf
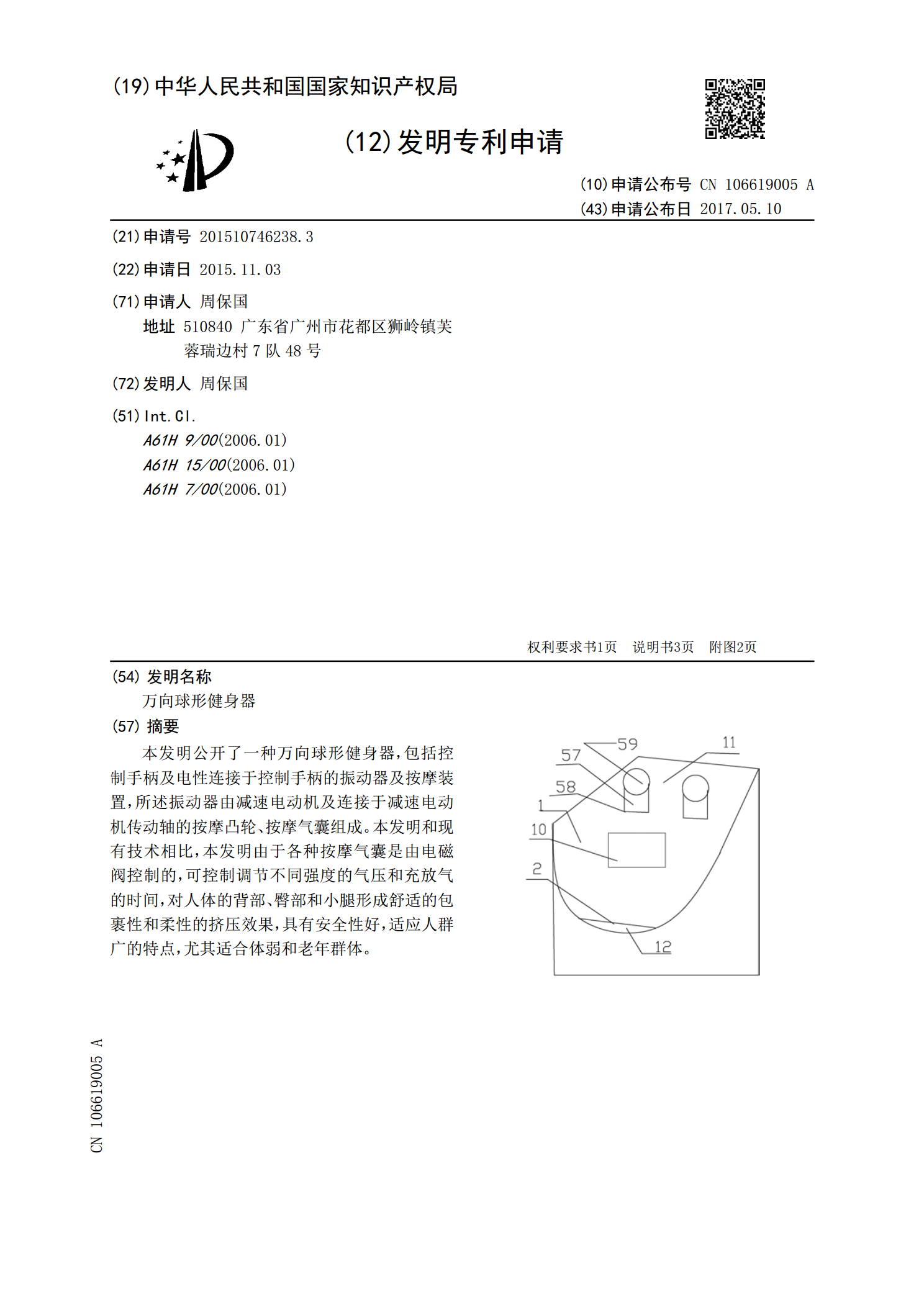
本发明公开了一种万向球形健身器,包括控制手柄及电性连接于控制手柄的振动器及按摩装置,所述振动器由减速电动机及连接于减速电动机传动轴的按摩凸轮、按摩气囊组成。本发明和现有技术相比,本发明由于各种按摩气囊是由电磁阀控制的,可控制调节不同强度的气压和充放气的时间,对人体的背部、臀部和小腿形成舒适的包裹性和柔性的挤压效果,具有安全性好,适应人群广的特点,尤其适合体弱和老年群体。
一种球形万向支架.pdf
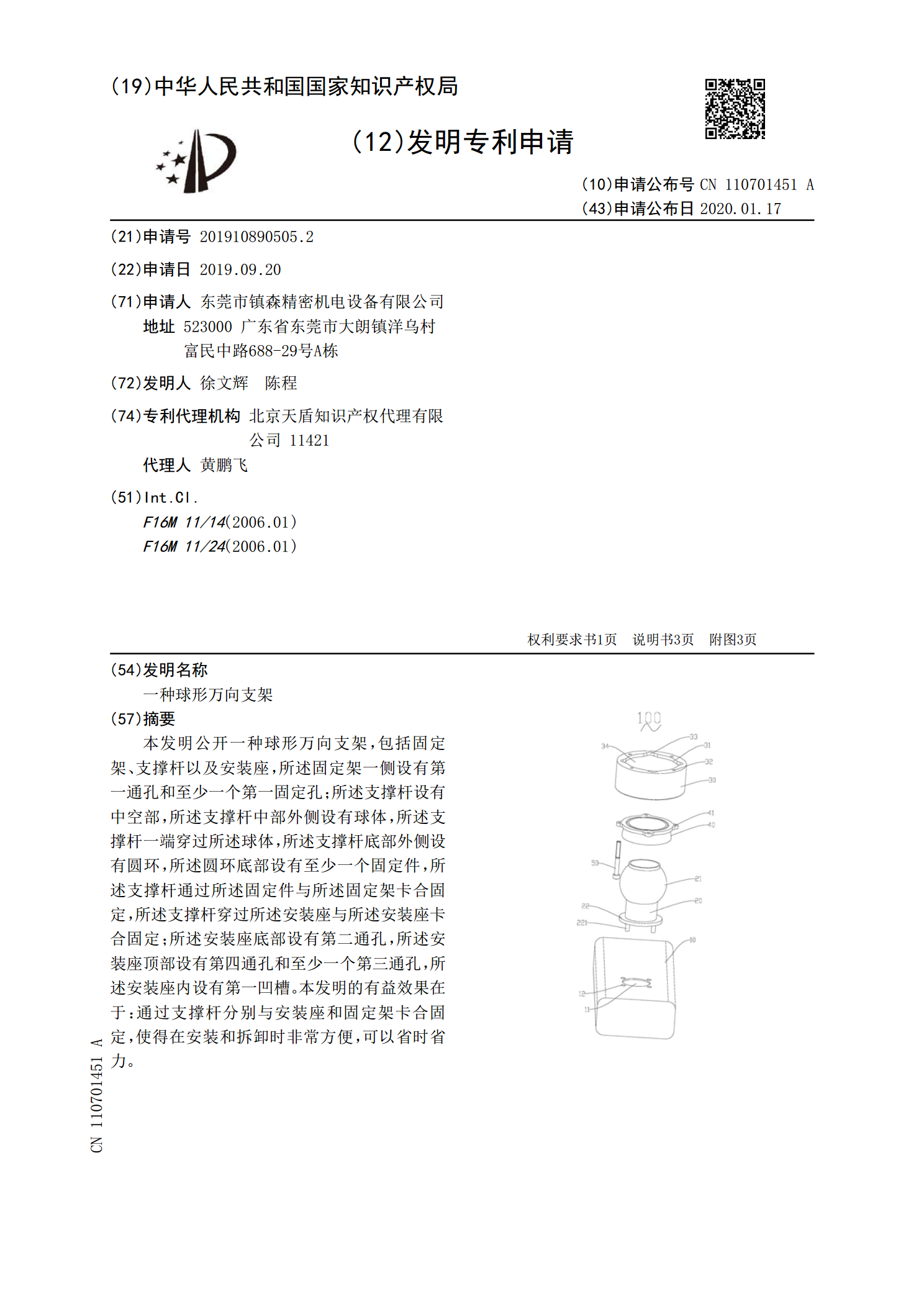
本发明公开一种球形万向支架,包括固定架、支撑杆以及安装座,所述固定架一侧设有第一通孔和至少一个第一固定孔;所述支撑杆设有中空部,所述支撑杆中部外侧设有球体,所述支撑杆一端穿过所述球体,所述支撑杆底部外侧设有圆环,所述圆环底部设有至少一个固定件,所述支撑杆通过所述固定件与所述固定架卡合固定,所述支撑杆穿过所述安装座与所述安装座卡合固定;所述安装座底部设有第二通孔,所述安装座顶部设有第四通孔和至少一个第三通孔,所述安装座内设有第一凹槽。本发明的有益效果在于:通过支撑杆分别与安装座和固定架卡合固定,使得在安装和