
一种包装机送料装置.pdf

秀华****魔王


1/5
2/5

3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种包装机送料装置.pdf
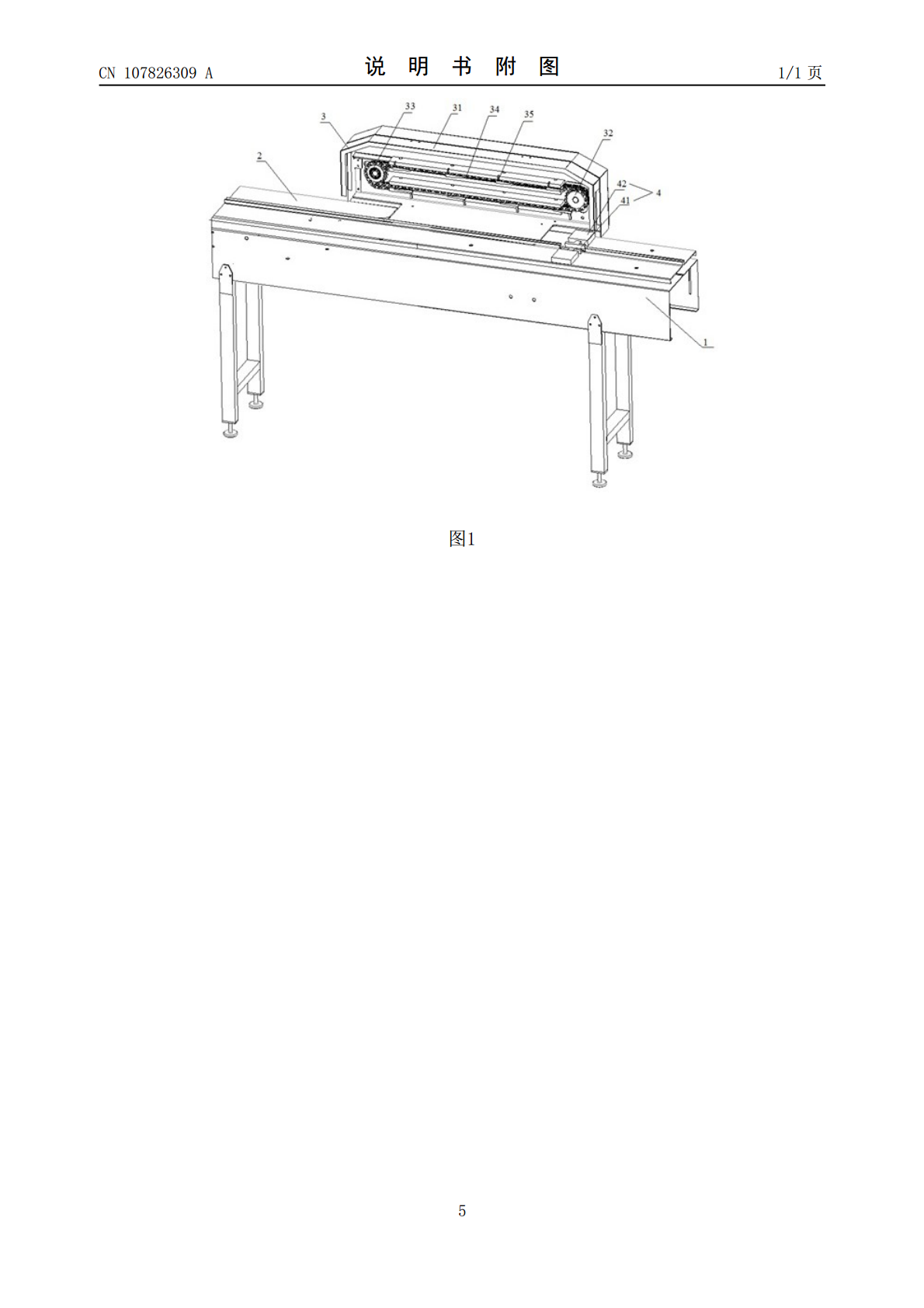
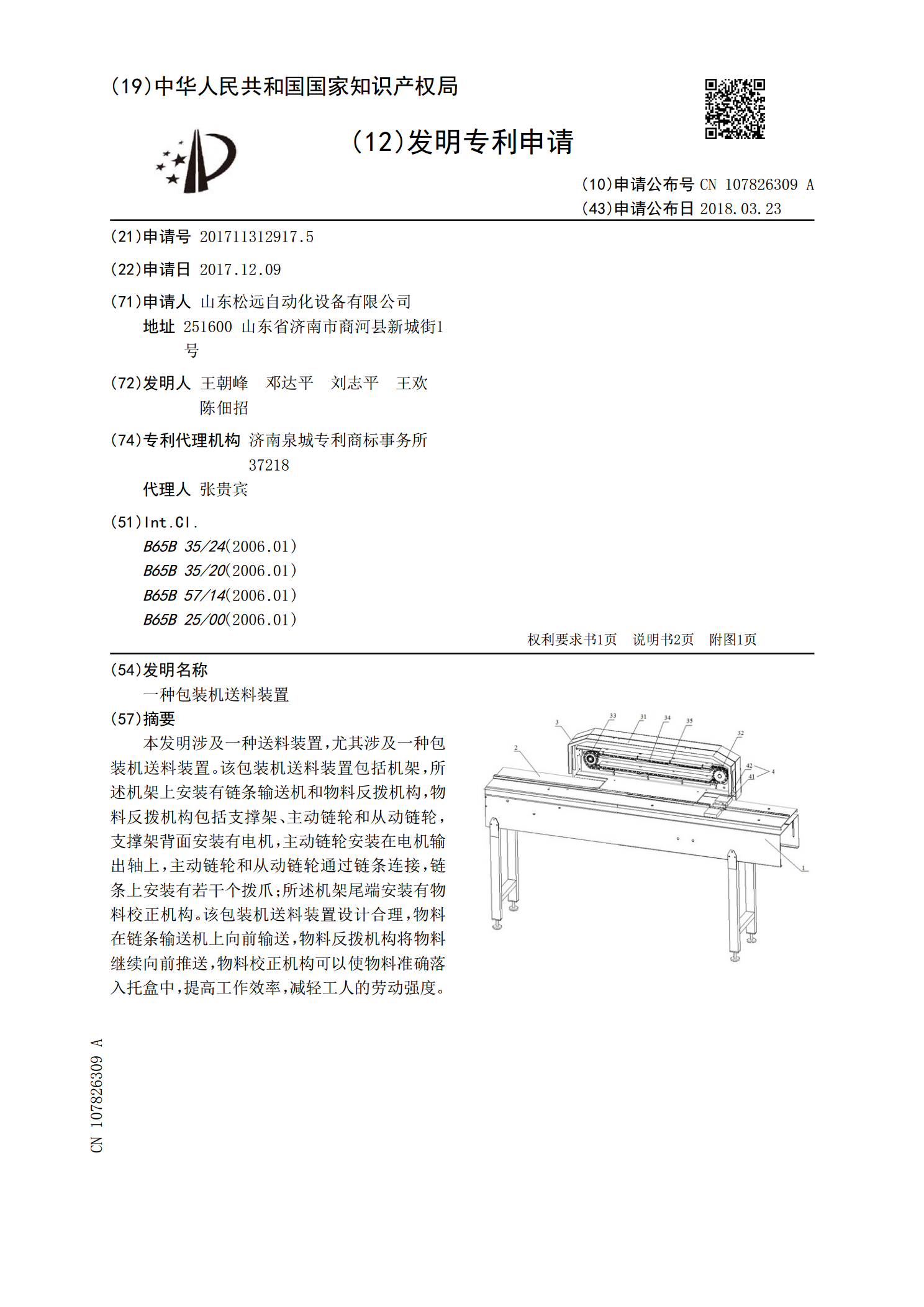
本发明涉及一种送料装置,尤其涉及一种包装机送料装置。该包装机送料装置包括机架,所述机架上安装有链条输送机和物料反拨机构,物料反拨机构包括支撑架、主动链轮和从动链轮,支撑架背面安装有电机,主动链轮安装在电机输出轴上,主动链轮和从动链轮通过链条连接,链条上安装有若干个拨爪;所述机架尾端安装有物料校正机构。该包装机送料装置设计合理,物料在链条输送机上向前输送,物料反拨机构将物料继续向前推送,物料校正机构可以使物料准确落入托盒中,提高工作效率,减轻工人的劳动强度。

一种包装机过渡送料装置.pdf
本发明公开了一种包装机过渡送料装置,包括传动组件、包装装置、灭菌组件和机架,其中传动组件设置于机架上,灭菌组件设置于机架上并位于传动组件下方,包装装置为于传动组件的传送终端。传动组件包括齿轮组、链条、传送带和传送盒,齿轮组为两个齿轮以圆心轴固定连接,齿轮组为两组,链条为两条、并分别设置于两组齿轮组两侧的齿轮上;传送带为圈形、长度与链条长度相等、其两侧分别与链条固定连接,传送盒固定设置于传送带上、其开口向传送带外。传送盒在齿轮上方时开口向上,为输送段;传送盒在齿轮下方时开口向下,为灭菌段。灭菌组件包括灭菌喷
一种环保包装机械的送料装置.pdf
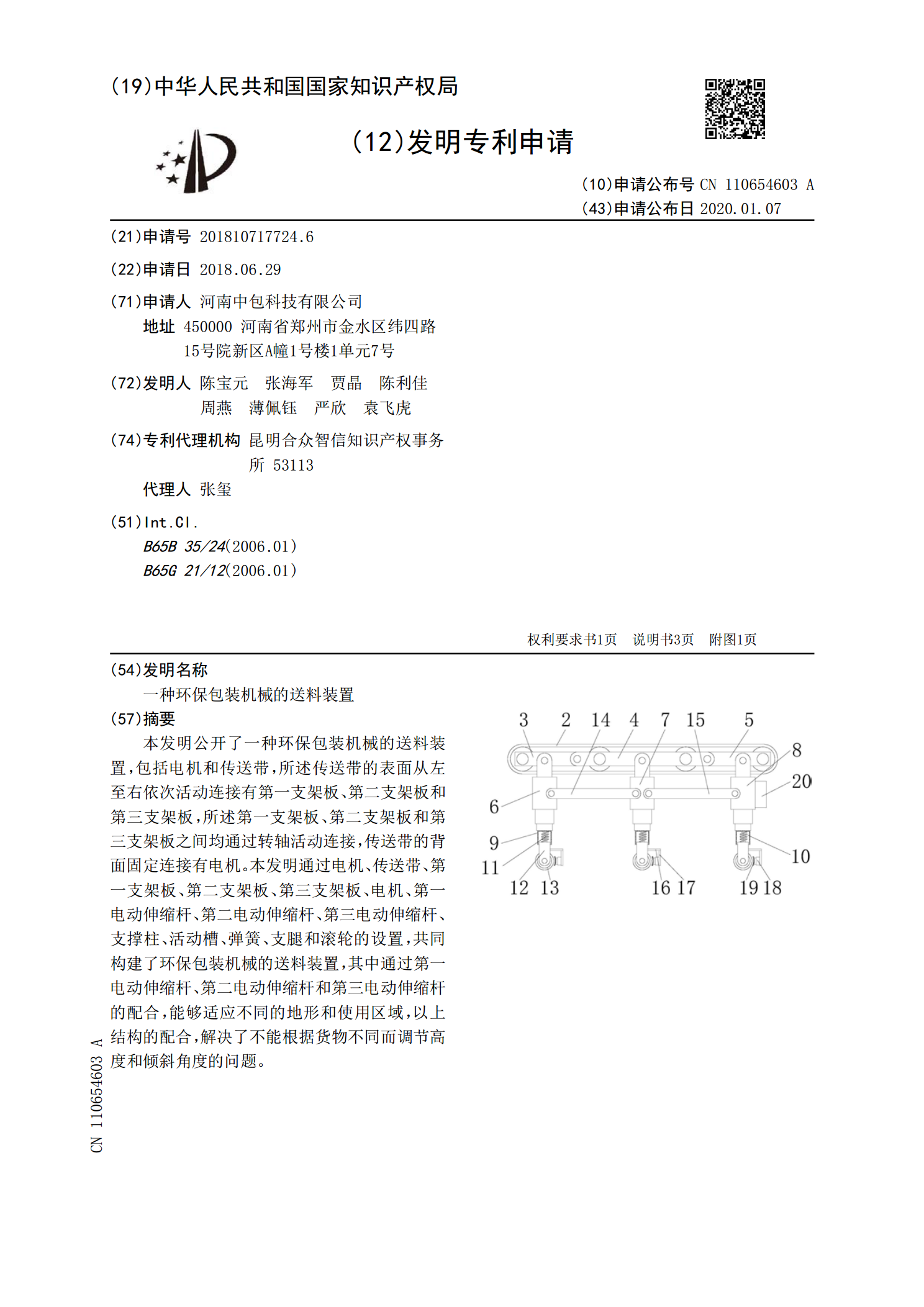
本发明公开了一种环保包装机械的送料装置,包括电机和传送带,所述传送带的表面从左至右依次活动连接有第一支架板、第二支架板和第三支架板,所述第一支架板、第二支架板和第三支架板之间均通过转轴活动连接,传送带的背面固定连接有电机。本发明通过电机、传送带、第一支架板、第二支架板、第三支架板、电机、第一电动伸缩杆、第二电动伸缩杆、第三电动伸缩杆、支撑柱、活动槽、弹簧、支腿和滚轮的设置,共同构建了环保包装机械的送料装置,其中通过第一电动伸缩杆、第二电动伸缩杆和第三电动伸缩杆的配合,能够适应不同的地形和使用区域,以上结构

一种环保用包装机用送料装置.pdf
本发明公开了一种环保用包装机用送料装置,包括底座,所述底座顶部的左侧通过转轴活动连接有第一主动轮,所述底座顶部的右侧通过转轴活动连接有第一从动轮,所述第一主动轮与第一从动轮通过传送带传动连接;所述底座的顶部设置有支撑板。本发明通过设置底座,达到对传送带支撑的效果,通过第一主动轮、第一从动轮和传送带,达到对产品输送的效果,也达到带动第二主动轮旋转的效果,通过第二主动轮、第二从动轮和皮带,达到带动发电机运行的效果,通过发电机和太阳能板,达到产生能源的效果,通过蓄电池,达到对能源储存的效果,该送料装置不需要市电
一种壁纸包装机自动送料装置.pdf
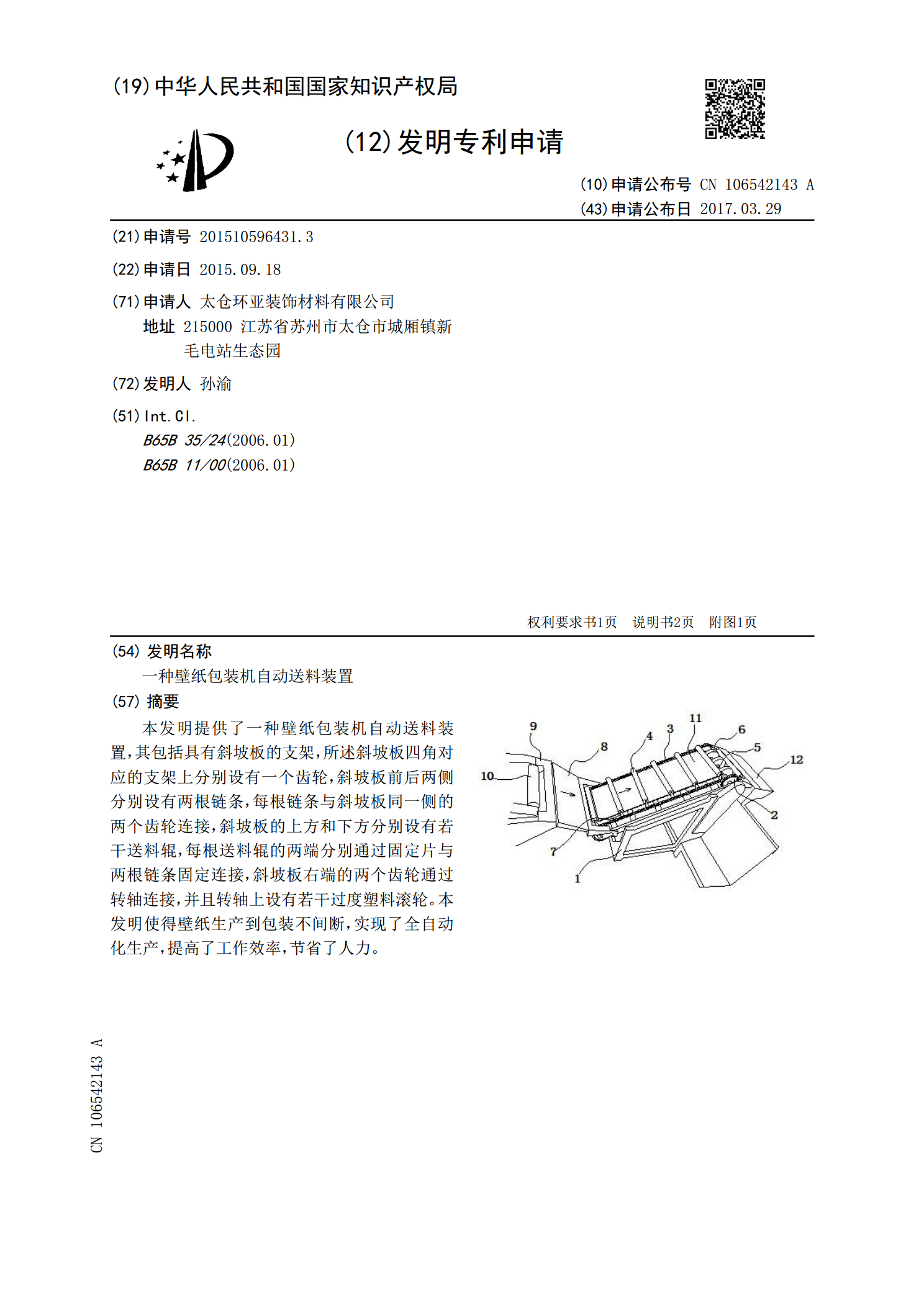
本发明提供了一种壁纸包装机自动送料装置,其包括具有斜坡板的支架,所述斜坡板四角对应的支架上分别设有一个齿轮,斜坡板前后两侧分别设有两根链条,每根链条与斜坡板同一侧的两个齿轮连接,斜坡板的上方和下方分别设有若干送料辊,每根送料辊的两端分别通过固定片与两根链条固定连接,斜坡板右端的两个齿轮通过转轴连接,并且转轴上设有若干过度塑料滚轮。本发明使得壁纸生产到包装不间断,实现了全自动化生产,提高了工作效率,节省了人力。