
一种过线导向组件.pdf

一条****贺6


1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种过线导向组件.pdf
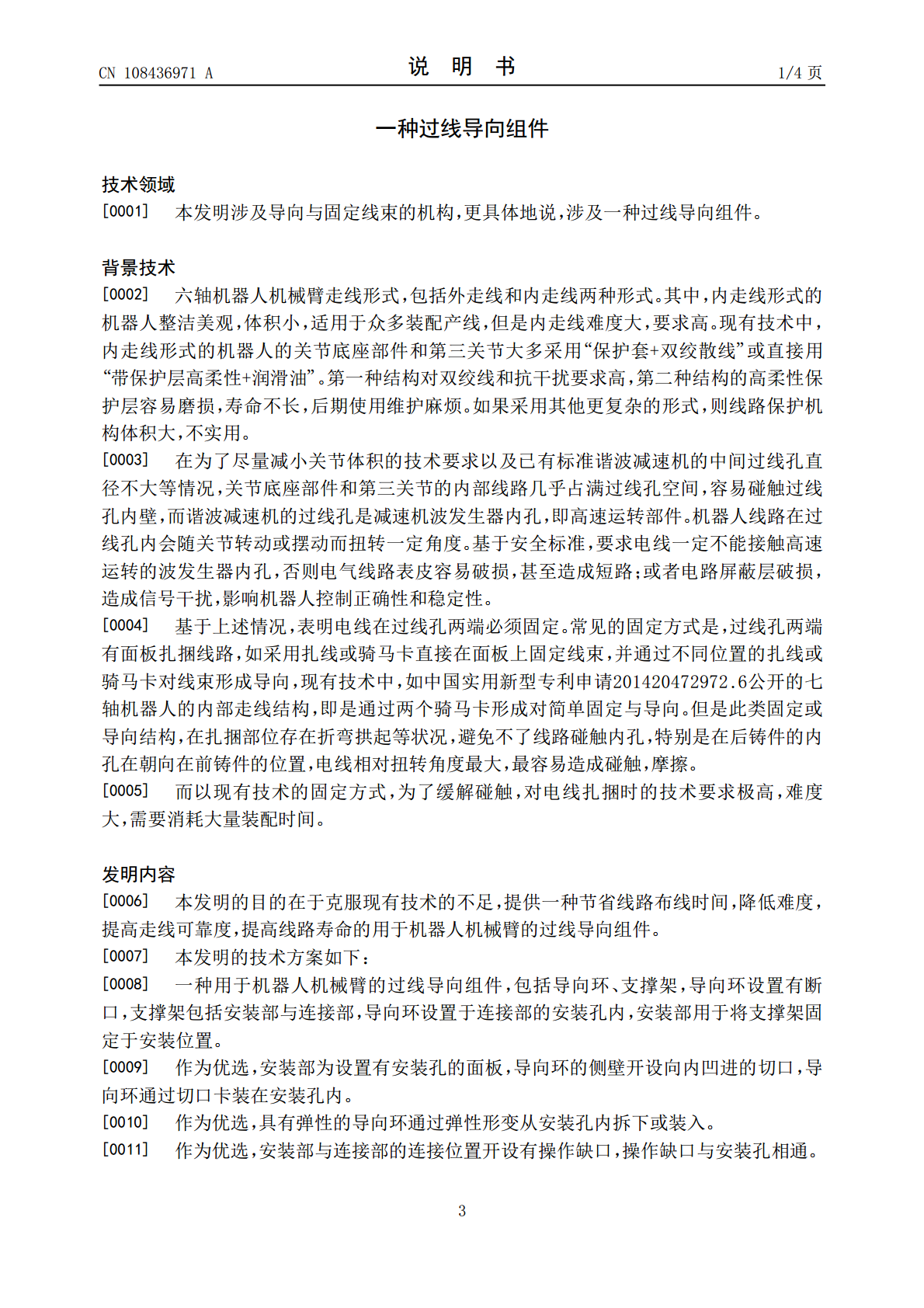
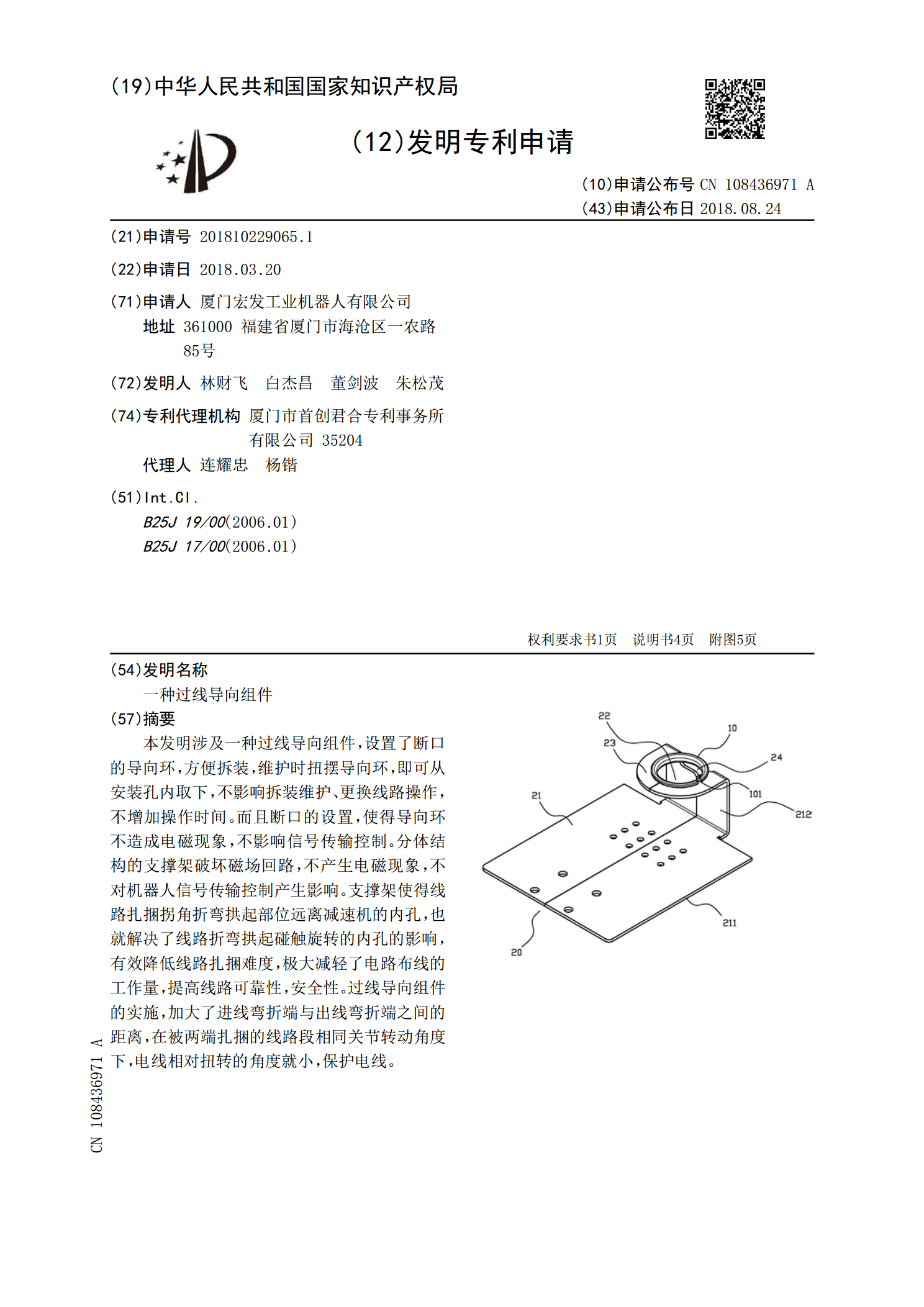
本发明涉及一种过线导向组件,设置了断口的导向环,方便拆装,维护时扭摆导向环,即可从安装孔内取下,不影响拆装维护、更换线路操作,不增加操作时间。而且断口的设置,使得导向环不造成电磁现象,不影响信号传输控制。分体结构的支撑架破坏磁场回路,不产生电磁现象,不对机器人信号传输控制产生影响。支撑架使得线路扎捆拐角折弯拱起部位远离减速机的内孔,也就解决了线路折弯拱起碰触旋转的内孔的影响,有效降低线路扎捆难度,极大减轻了电路布线的工作量,提高线路可靠性,安全性。过线导向组件的实施,加大了进线弯折端与出线弯折端之间的距离
一种绕线机过线导向装置.pdf
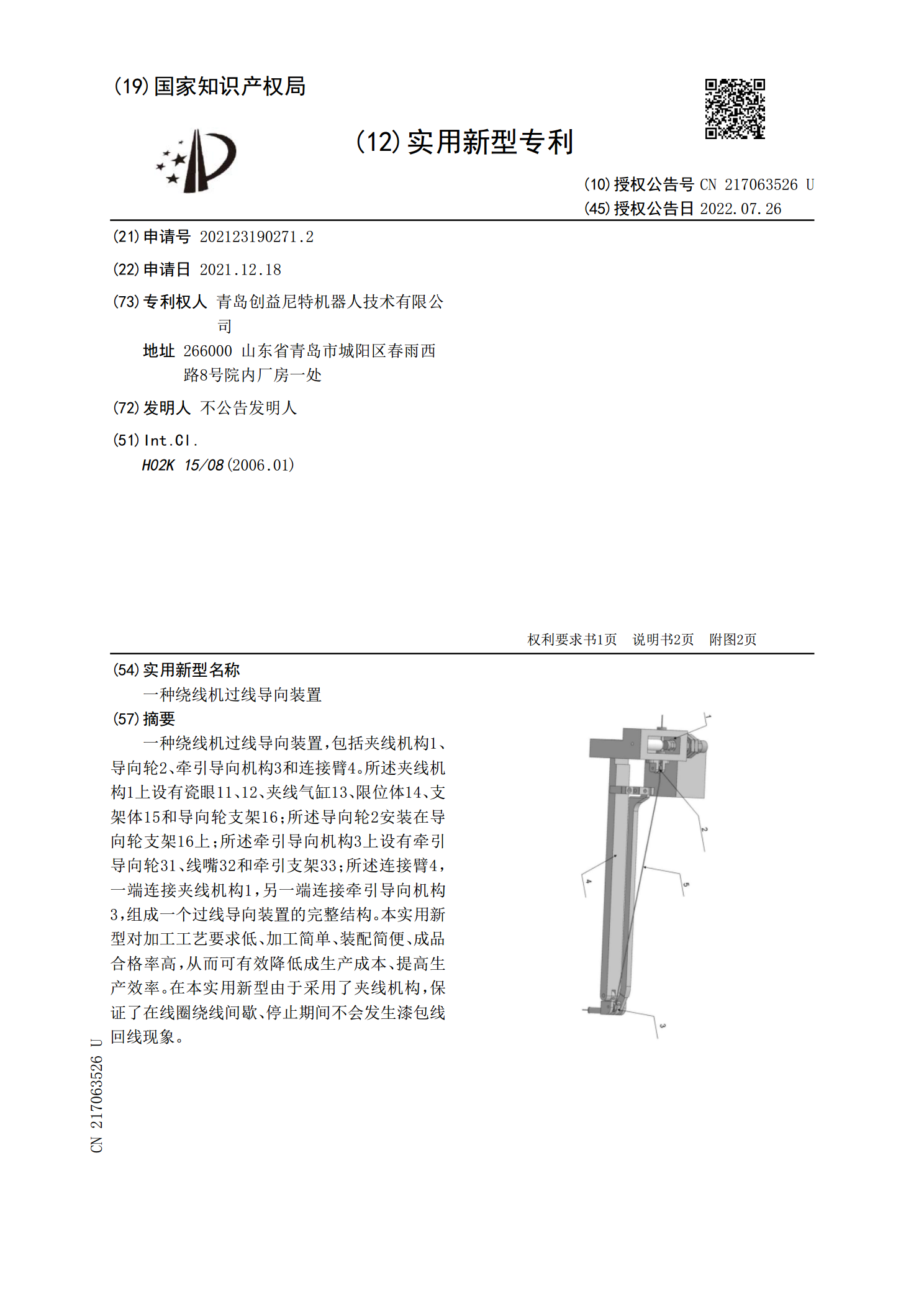
一种绕线机过线导向装置,包括夹线机构1、导向轮2、牵引导向机构3和连接臂4。所述夹线机构1上设有瓷眼11、12、夹线气缸13、限位体14、支架体15和导向轮支架16;所述导向轮2安装在导向轮支架16上;所述牵引导向机构3上设有牵引导向轮31、线嘴32和牵引支架33;所述连接臂4,一端连接夹线机构1,另一端连接牵引导向机构3,组成一个过线导向装置的完整结构。本实用新型对加工工艺要求低、加工简单、装配简便、成品合格率高,从而可有效降低成生产成本、提高生产效率。在本实用新型由于采用了夹线机构,保证了在线圈绕线间
一种退火炉用过线导向栅板.pdf
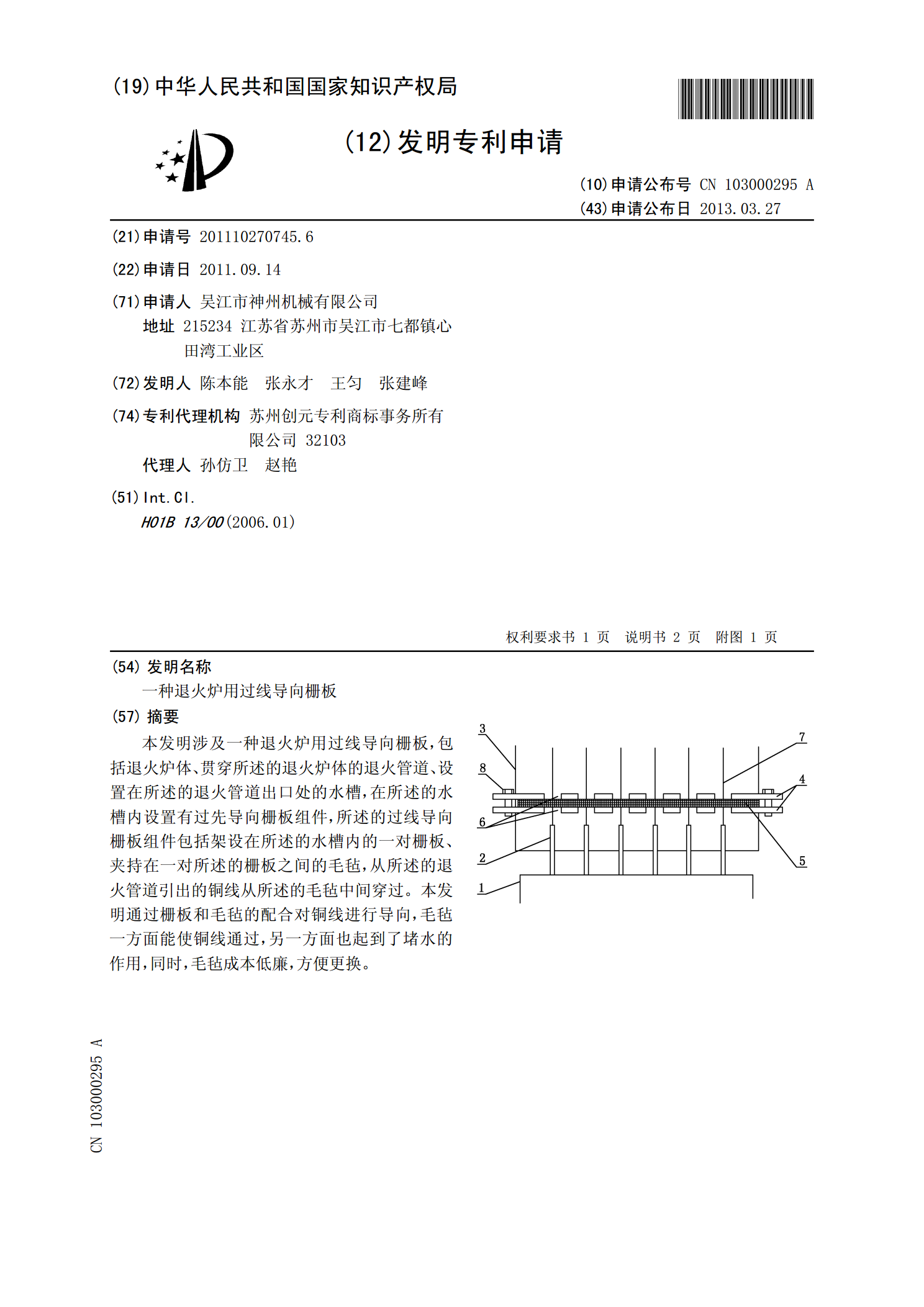
本发明涉及一种退火炉用过线导向栅板,包括退火炉体、贯穿所述的退火炉体的退火管道、设置在所述的退火管道出口处的水槽,在所述的水槽内设置有过先导向栅板组件,所述的过线导向栅板组件包括架设在所述的水槽内的一对栅板、夹持在一对所述的栅板之间的毛毡,从所述的退火管道引出的铜线从所述的毛毡中间穿过。本发明通过栅板和毛毡的配合对铜线进行导向,毛毡一方面能使铜线通过,另一方面也起到了堵水的作用,同时,毛毡成本低廉,方便更换。

一种导向轮组件.pdf
本申请涉及一种导向轮组件,所述的导向轮组件包括安装块、设置在所述的安装块上的沿所述的安装块的表面向同一方向延伸设置的第一延伸部、第二延伸部和第三延伸部,所述的第一延伸部、第二延伸部和第三延伸部依次排列设置,所述的第一延伸部和第二延伸部之间安装有第一导向轮,所述的第二延伸部和第三延伸部之间安装有第二导向轮。本申请所述的导向轮组件,包括安装块,能够通过安装块将导向轮固定在机架上,所述的导向轮可以设置多个,根据实际需要调整数量。该导向轮组件结构简单,使用方便。

拉丝机过线导轮组件.pdf
本发明涉及一种导轮组件,尤其是一种拉丝机过线导轮组件,具体地说用于拉丝机工作中固定丝的传递方向。按照本发明提供的技术方案,一种拉丝机过线导轮组件,包括过线轮,还包括定位导轮轮轴,所述过线轮通过轴承安装在定位导轮轮轴的端部,所述定位导轮轮轴上设有弹性挡圈。本发明结构简单,稳定性好,成本低廉。