
一种基于自适应轨迹优化的船舶航道模型提取方法.pdf

一吃****新冬


1/8

2/8

3/8

4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于自适应轨迹优化的船舶航道模型提取方法.pdf
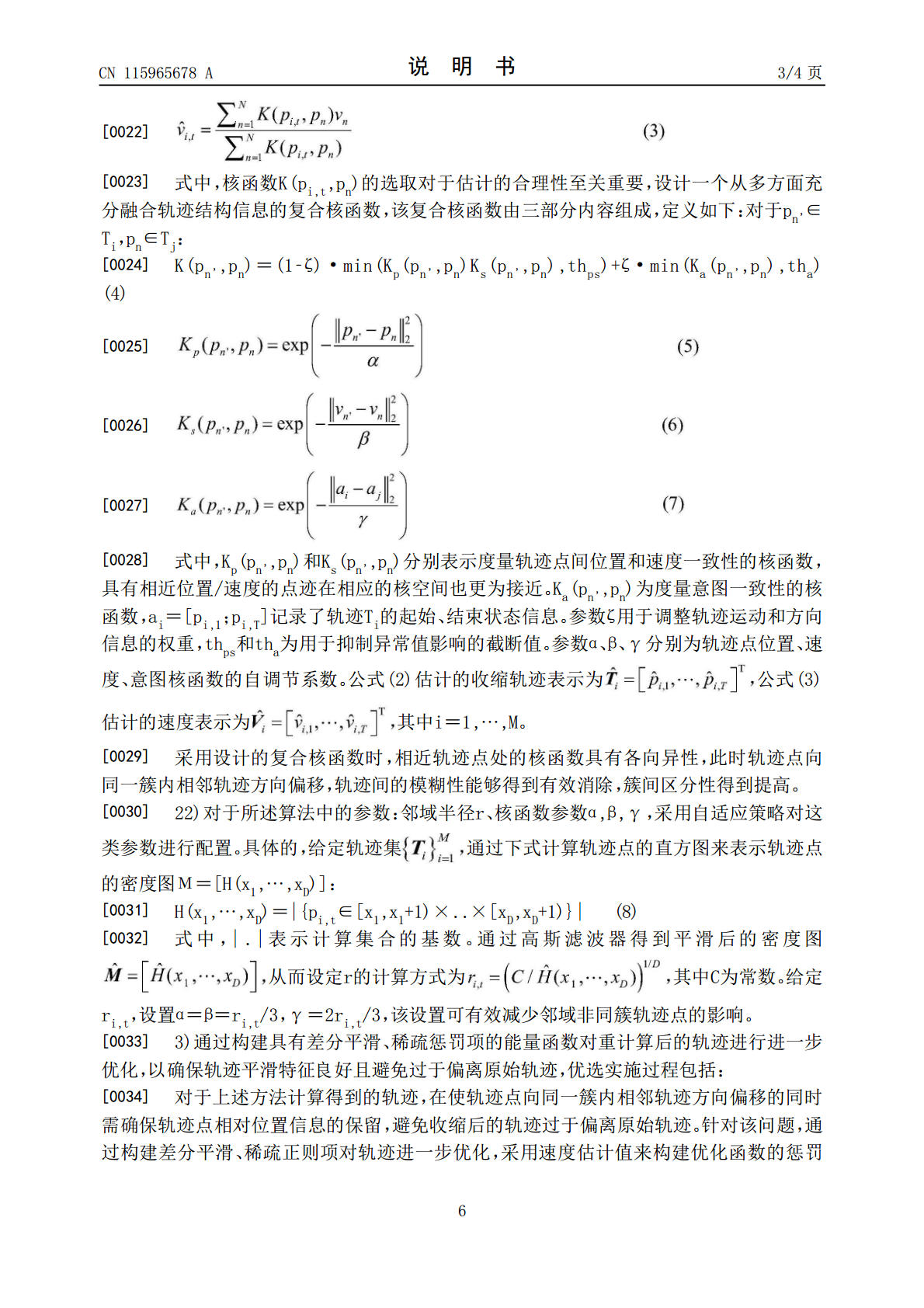
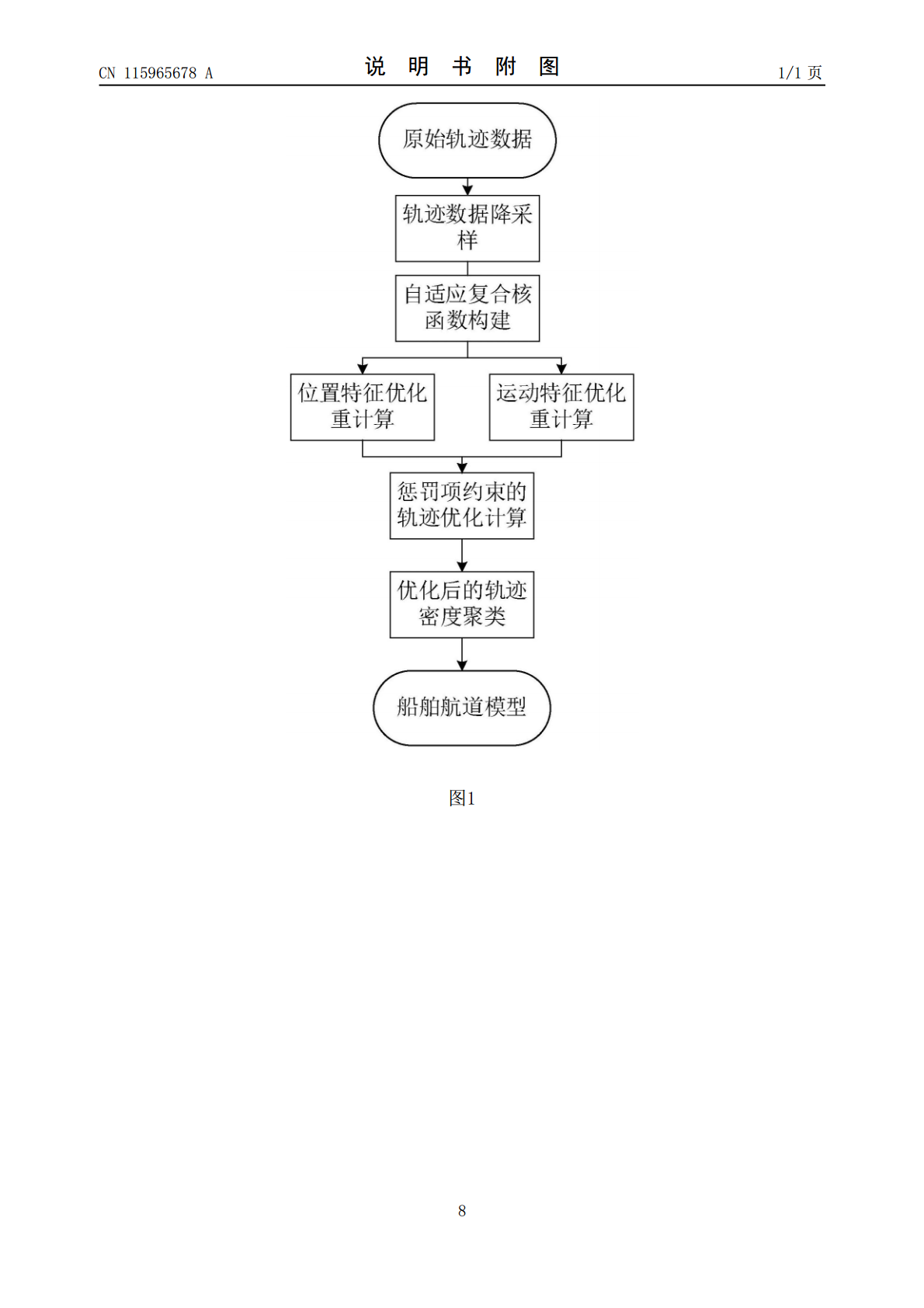
本发明公开一种基于自适应轨迹优化的船舶航道模型提取方法。设计一种融合轨迹运动信息的自适应复合核函数,对轨迹点的位置及运动特征进行优化重计算,使轨迹靠近相应的簇心,从而得到更具区分性的轨迹表示。通过构建具有差分平滑、稀疏惩罚项的能量函数对重计算后的轨迹进行进一步优化,以确保轨迹平滑特征良好且避免过于偏离原始轨迹。最后结合优化后的轨迹采用动态时间弯曲距离和DBSCAN密度聚类方法实现船舶轨迹模型的提取。本发明在消除轨迹间模糊性、提高簇间区分性的同时能使航路特征更明显,有效改善航道聚类效果。

基于航道模型的船舶轨迹异常检测方法.pdf
本发明公开了一种基于航道模型的船舶轨迹异常检测方法,包括如下步骤:1、获取选定时间区间内的历史AIS数据;步骤2、对历史AIS数据进行预处理;3、对预处理后的AIS数据分别提取出航道模型的航点和航线,将航点和航线分别当作图论中的图的顶点和边,来组成航道模型:步骤4、对航道模型按时间要素进行加权,得到最终的航道模型;步骤5、将最终的航道模型与待检测轨迹进行比较,根据待检测轨迹在最终的航道模型中是否出现来判断轨迹是否异常。本发明通过融合基于点算法和基于轨迹算法的优点,充分挖掘了热点区域内的航行历史规律,又得到

基于大规模船舶轨迹数据的航道边界提取方法.docx
基于大规模船舶轨迹数据的航道边界提取方法基于大规模船舶轨迹数据的航道边界提取方法摘要:随着船舶轨迹数据的日益丰富和资源的快速发展,船舶轨迹数据分析成为了航海领域和交通管理领域的热门研究方向。其中,航道边界提取是航行安全和交通管理的重要环节。本论文通过分析大规模船舶轨迹数据,提出了一种基于船舶密度和轨迹聚类的航道边界提取方法。实验结果表明,该方法能够有效地提取出航道边界,为航海领域和交通管理领域提供重要的支持和指导。一、引言航道是船舶安全航行的重要通道,对于保障航行安全和交通管理具有重要意义。船舶轨迹数据是

基于船舶轨迹特征点提取的时空DP方法.pdf
本发明公开了一种基于船舶轨迹特征点提取的时空DP方法,属于船舶轨迹压缩技术领域,包括:步骤1:利用聚类算法对AIS原始数据进行聚类分析,识别AIS数据中的离群点,进而对噪声点进行剔除;步骤2:对船舶航向改变、航速改变、船舶进出某区域等特征轨迹点进行识别与保留;步骤3:以船舶轨迹的起点、终点以及步骤2保留的特征轨迹点为初始点,同时考虑AIS数据的时空特性,对AIS数据进行压缩。利用本发明可以对冗杂AIS数据进行有效压缩,压缩后船舶轨迹与原轨迹差异极小,同时能够保留船舶运动状态改变点,船舶进出区域边界点的信息

一种基于状态空间模型的结构振动模态轨迹提取方法.docx
一种基于状态空间模型的结构振动模态轨迹提取方法随着结构振动的应用越来越广泛,结构动力学研究日益深入,结构振动模态轨迹提取方法的研究也越来越重要。本文介绍了一种基于状态空间模型的结构振动模态轨迹提取方法。该方法利用状态空间模型来描述结构振动的状态演化规律,从而实现对结构振动模态轨迹的提取,并且在实际工程中取得了很好的应用效果。一、状态空间模型的基本原理状态空间模型是用来描述系统随时间变化而变化的一种数学模型。在状态空间模型中,将系统的动态行为视为一个连续的时间函数,称为状态方程。状态方程包括系统的输入,状态