
船体空化水射流清刷机器人设计与清洗效率研究.doc

雨巷****轶丽


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

船体空化水射流清刷机器人设计与清洗效率研究.doc
船体空化水射流清刷机器人设计与清洗效率研究目前,国内大型船舶清刷方式仍然采用传统干船坞清刷,其方式为船舶表面生长大量海洋生物后,通过机械拖拽至陆地利用大量人力进行清刷,清刷成本高、周期长。船舶无法长期保持船体流线形,增加了燃油消耗、降低了航行速度。而国际发达国家已较多的采用清刷机器人进行清刷作业,但其售价高昂、购买困难、售后不便,因此并不适用于国内船舶清刷行业。空化水射流技术利用流体在压力变化中产生的空化泡破裂时所释放的能量,能够高效、环保、低成本的进行清刷作业,因此非常适用于船舶表面清刷。设计一款应用空

船体空化水射流清刷机器人设计与清洗效率研究.doc
船体空化水射流清刷机器人设计与清洗效率研究目前,国内大型船舶清刷方式仍然采用传统干船坞清刷,其方式为船舶表面生长大量海洋生物后,通过机械拖拽至陆地利用大量人力进行清刷,清刷成本高、周期长。船舶无法长期保持船体流线形,增加了燃油消耗、降低了航行速度。而国际发达国家已较多的采用清刷机器人进行清刷作业,但其售价高昂、购买困难、售后不便,因此并不适用于国内船舶清刷行业。空化水射流技术利用流体在压力变化中产生的空化泡破裂时所释放的能量,能够高效、环保、低成本的进行清刷作业,因此非常适用于船舶表面清刷。设计一款应用空
空化射流船体清洗报告.doc
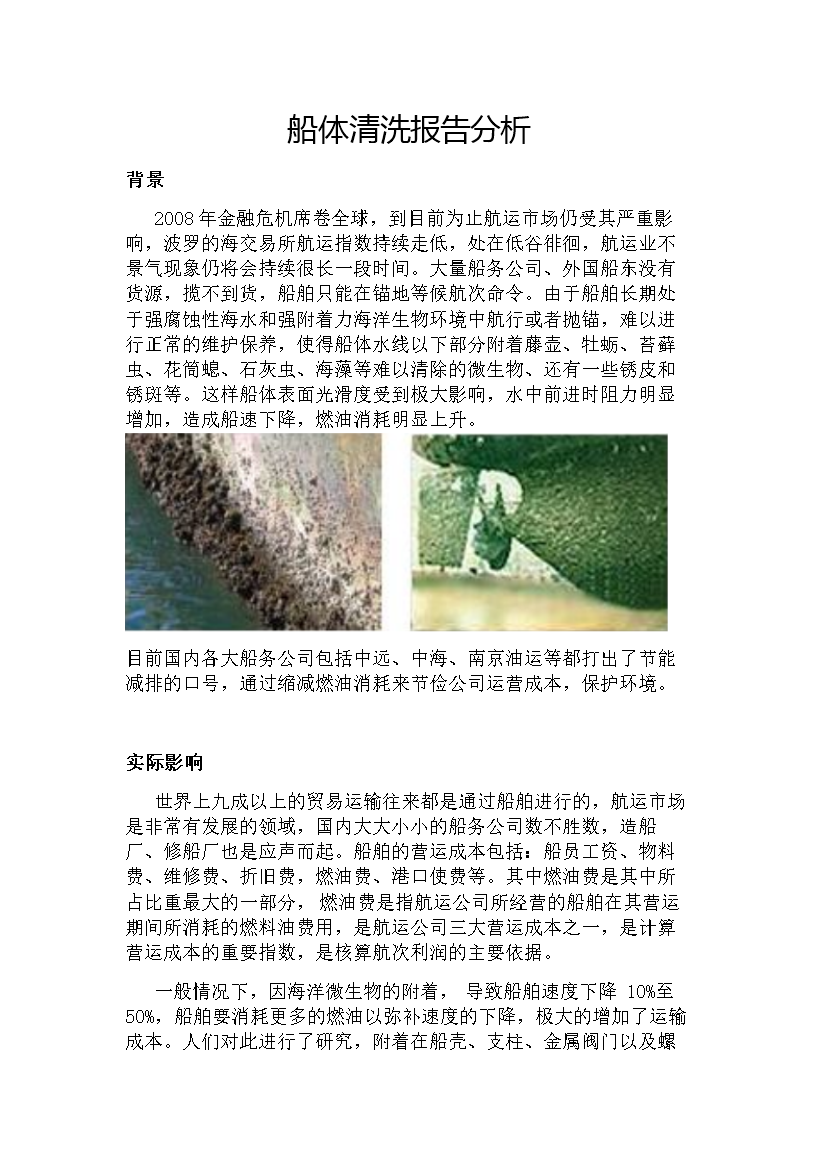
船体清洗报告分析背景2008年金融危机席卷全球到目前为止航运市场仍受其严重影响波罗的海交易所航运指数持续走低处在低谷徘徊航运业不景气现象仍将会持续很长一段时间。大量船务公司、外国船东没有货源揽不到货船舶只能在锚地等候航次命令。由于船舶长期处于强腐蚀性海水和强附着力海洋生物环境中航行或者抛锚难以进行正常的维护保养使得船体水线以下部分附着藤壶、牡蛎、苔藓虫、花筒螅、石灰虫、
空化射流船体清洗报告.doc
船体清洗报告分析背景2008年金融危机席卷全球到目前为止航运市场仍受其严重影响波罗的海交易所航运指数持续走低处在低谷徘徊航运业不景气现象仍将会持续很长一段时间。大量船务公司、外国船东没有货源揽不到货船舶只能在锚地等候航次命令。由于船舶长期处于强腐蚀性海水和强附着力海洋生物环境中航行或者抛锚难以进行正常的维护保养使得船体水线以下部分附着藤壶、牡蛎、苔藓虫、花筒螅、石灰虫、
空化射流船体清洗报告.doc
船体清洗报告分析背景2008年金融危机席卷全球到目前为止航运市场仍受其严重影响波罗的海交易所航运指数持续走低处在低谷徘徊航运业不景气现象仍将会持续很长一段时间。大量船务公司、外国船东没有货源揽不到货船舶只能在锚地等候航次命令。由于船舶长期处于强腐蚀性海水和强附着力海洋生物环境中航行或者抛锚难以进行正常的维护保养使得船体水线以下部分附着藤壶、牡蛎、苔藓虫、花筒螅、石灰虫、