
一种仓储物流装卸机器人.pdf

一只****爱敏


1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种仓储物流装卸机器人.pdf
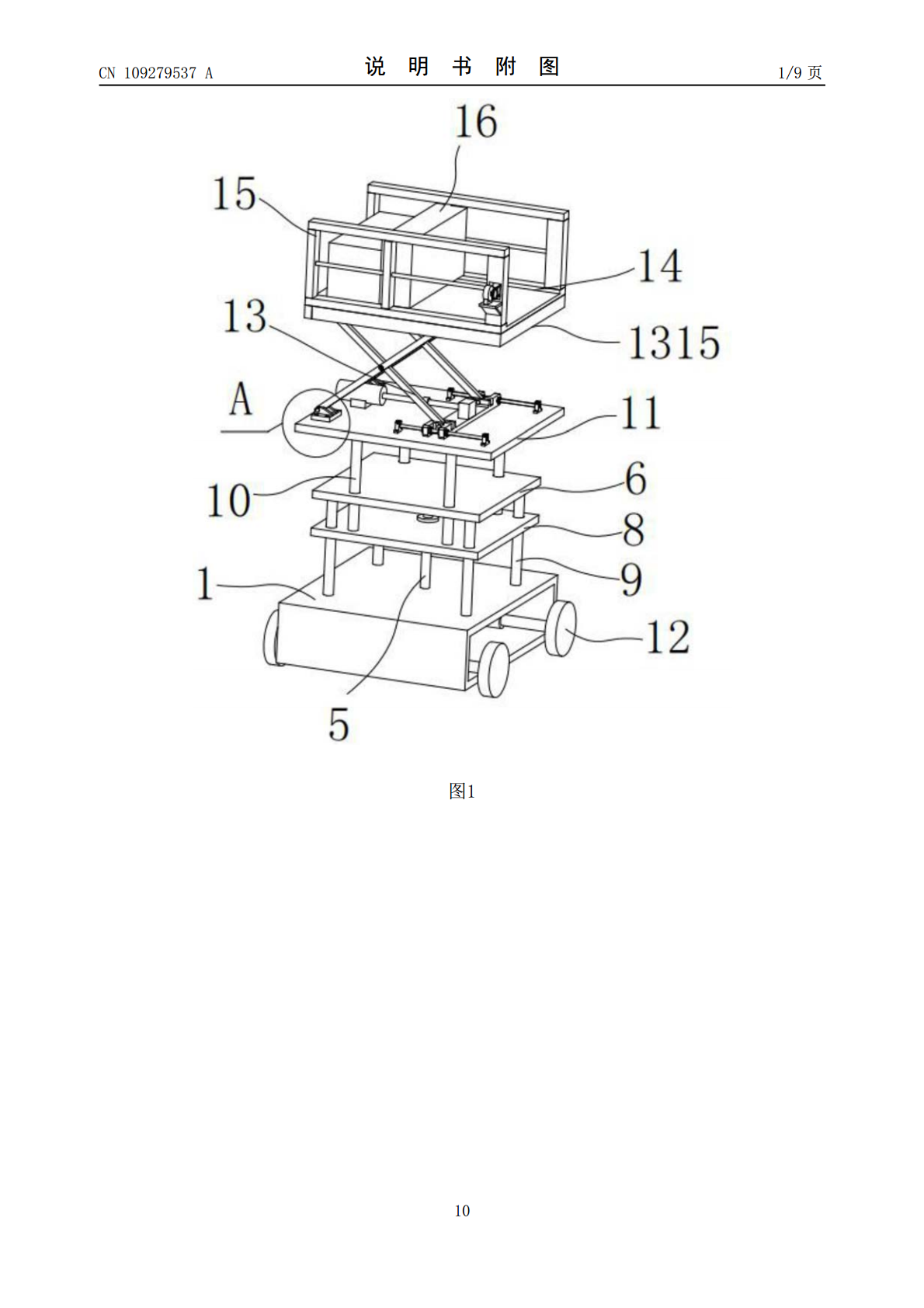
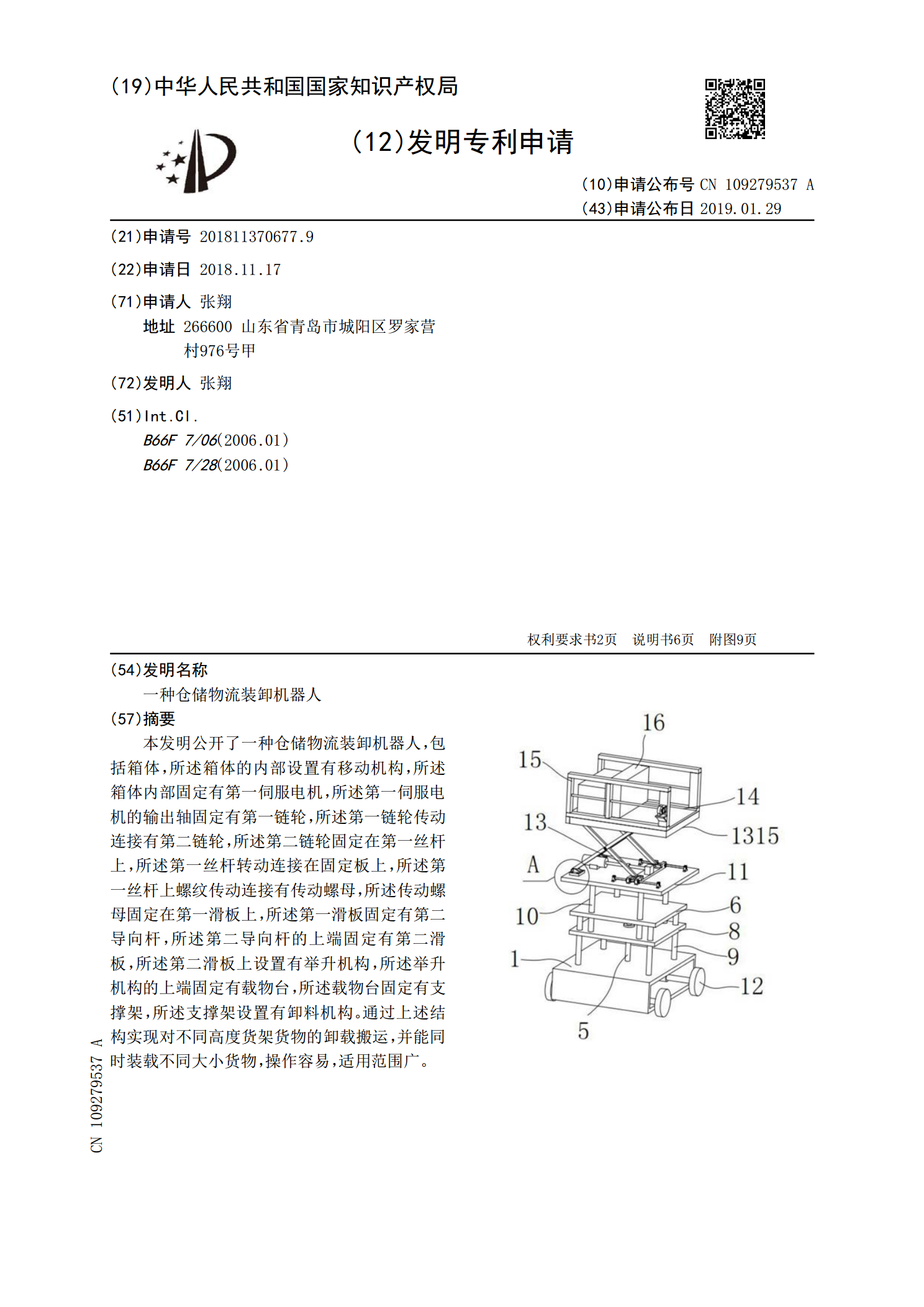
本发明公开了一种仓储物流装卸机器人,包括箱体,所述箱体的内部设置有移动机构,所述箱体内部固定有第一伺服电机,所述第一伺服电机的输出轴固定有第一链轮,所述第一链轮传动连接有第二链轮,所述第二链轮固定在第一丝杆上,所述第一丝杆转动连接在固定板上,所述第一丝杆上螺纹传动连接有传动螺母,所述传动螺母固定在第一滑板上,所述第一滑板固定有第二导向杆,所述第二导向杆的上端固定有第二滑板,所述第二滑板上设置有举升机构,所述举升机构的上端固定有载物台,所述载物台固定有支撑架,所述支撑架设置有卸料机构。通过上述结构实现对不同

一种仓储物流装卸机器人装置.pdf
本发明公开了一种仓储物流装卸机器人装置,包括机架台以及设在所述机架台上端端面的第一机箱,所述第一机箱左端设有第二机箱,所述第二机箱内设有第一电机,所述第一电机右端末端动力连接有左右延伸的第一转动轴,所述第一转动轴右端末端伸入所述第一机箱箱体内部且设有第一锥齿轮,所述第一机箱内转动配合连接有前后延伸的第一转动轴,所述第一转动轴前后延伸末端贯穿所述第一机箱前后端面且在末端设有上下延伸的第一转动杆,所述第一转动轴上设有位于所述第一机箱内的第二锥齿轮,所述第二锥齿轮与所述第一锥齿轮齿合连接;本发明结构简单,操作方

一种多功能仓储物流装卸机器人装置.pdf
本发明公开了一种多功能仓储物流装卸机器人装置,包括机架台以及设在所述机架台上端端面的第一机箱,所述第一机箱左端设有第二机箱,所述第二机箱内设有第一电机,所述第一电机右端末端动力连接有左右延伸的第一转动轴,所述第一转动轴右端末端伸入所述第一机箱箱体内部且设有第一锥齿轮,所述第一机箱内转动配合连接有前后延伸的第一转动轴,所述第一转动轴前后延伸末端贯穿所述第一机箱前后端面且在末端设有上下延伸的第一转动杆,所述第一转动轴上设有位于所述第一机箱内的第二锥齿轮,所述第二锥齿轮与所述第一锥齿轮齿合连接;本发明结构简单,
一种仓储物流装卸装置.pdf
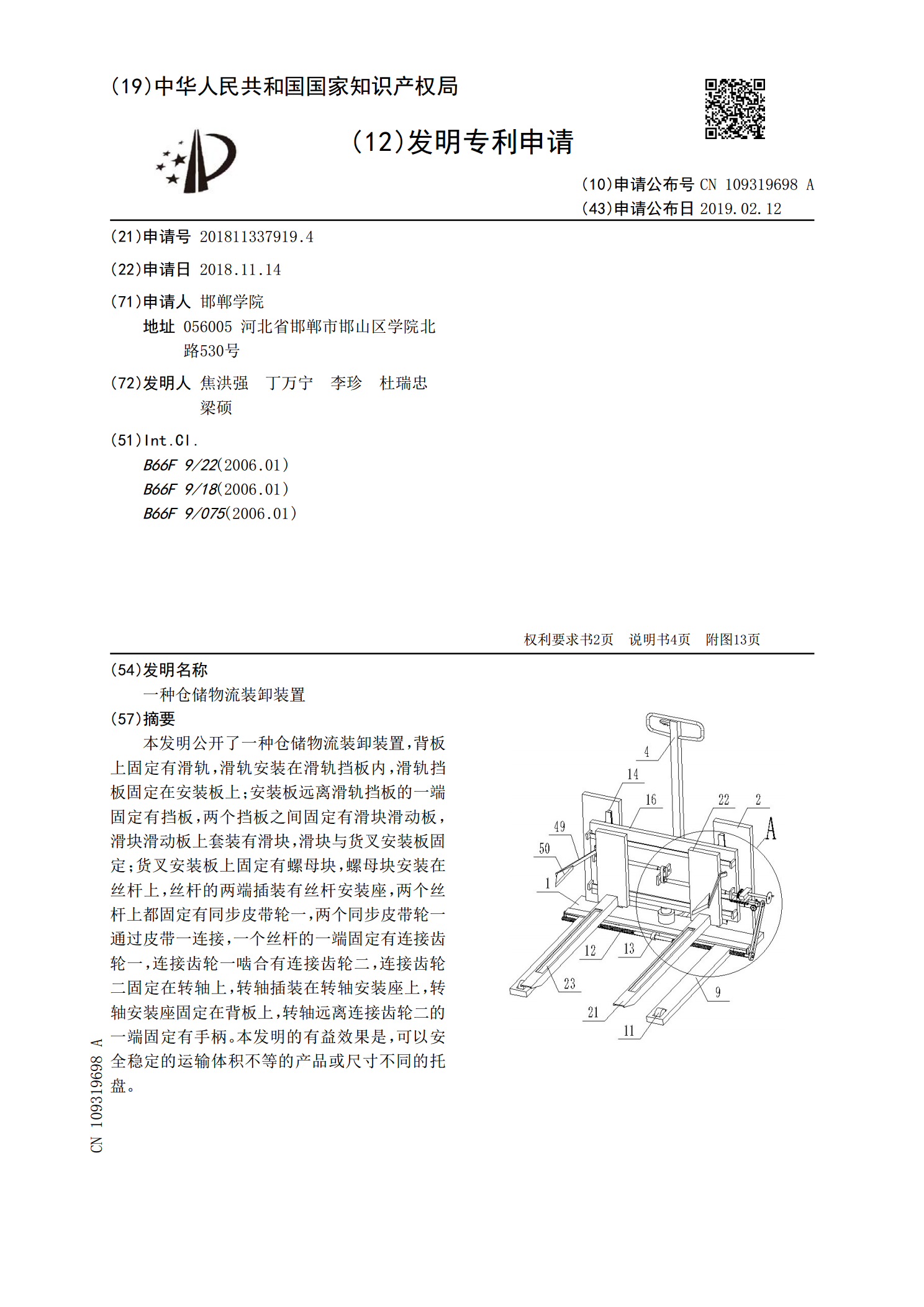
本发明公开了一种仓储物流装卸装置,背板上固定有滑轨,滑轨安装在滑轨挡板内,滑轨挡板固定在安装板上;安装板远离滑轨挡板的一端固定有挡板,两个挡板之间固定有滑块滑动板,滑块滑动板上套装有滑块,滑块与货叉安装板固定;货叉安装板上固定有螺母块,螺母块安装在丝杆上,丝杆的两端插装有丝杆安装座,两个丝杆上都固定有同步皮带轮一,两个同步皮带轮一通过皮带一连接,一个丝杆的一端固定有连接齿轮一,连接齿轮一啮合有连接齿轮二,连接齿轮二固定在转轴上,转轴插装在转轴安装座上,转轴安装座固定在背板上,转轴远离连接齿轮二的一端固定有

一种物流机器人自动装卸系统.pdf
本发明涉及一种物流机器人自动装卸系统,包括运输机构、安装在运输机构上的升降机构、安装在升降机构上的支架、均安装在支架上的传送机构和装卸机械臂机构;支架的其中一部分安装在升降机构上,支架的其余部分悬空,装卸机械臂机构安装在支架悬空部分的末端上,传送机构包括安装在支架上的驱动电机、安装在驱动电机输出端上的驱动轮、均转动式安装在支架上的从动轮和加紧轮、套在驱动轮和从动轮上的送料皮带;加紧轮位于送料皮带的下方并挤压皮带的下表面,支架的两侧均设有支撑柱和护栏带,支撑柱固定在支架上,护栏带固定在支撑柱上,护栏带位于送