
一种海上光伏清洁装置.pdf

Ke****67


1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种海上光伏清洁装置.pdf
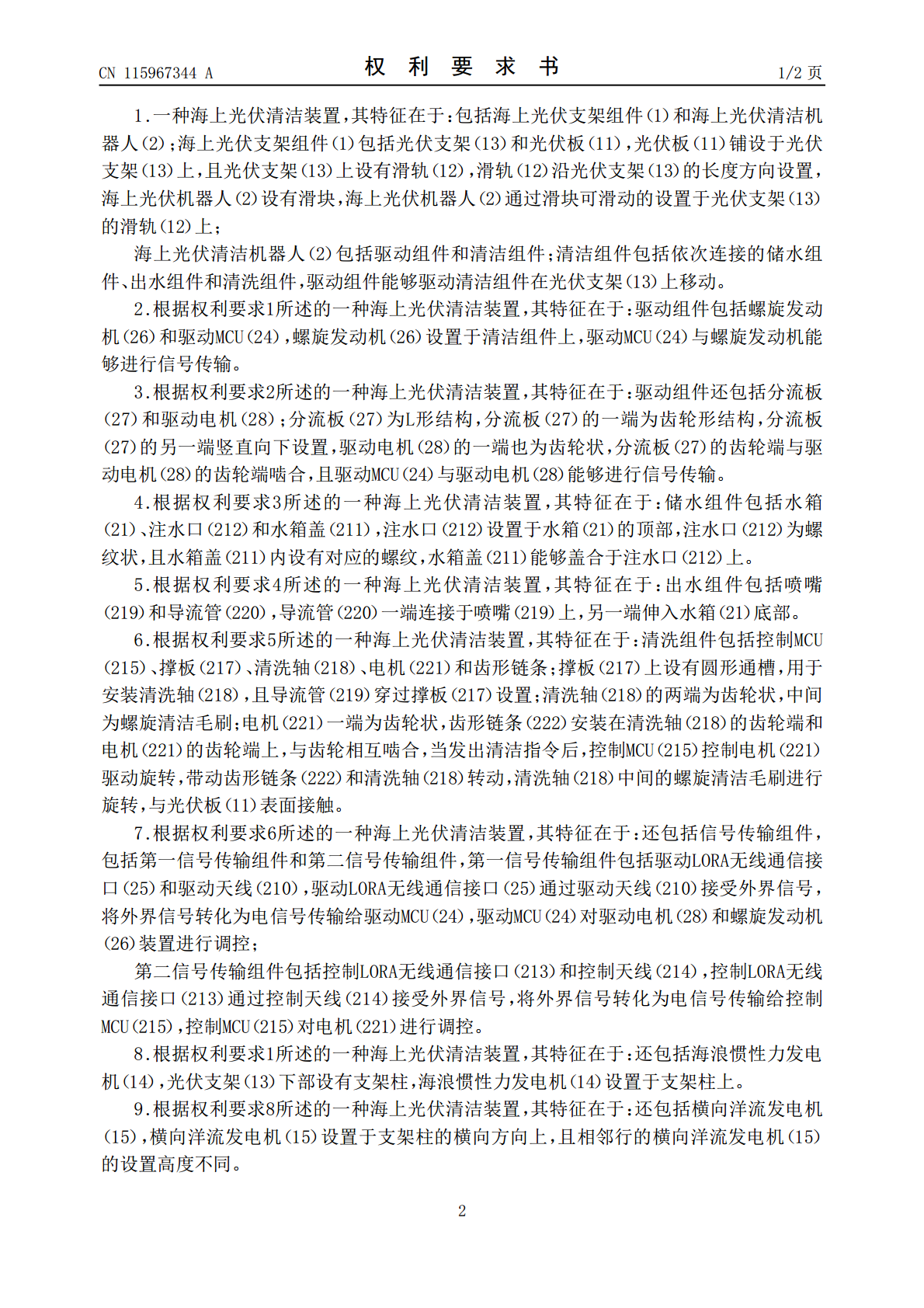
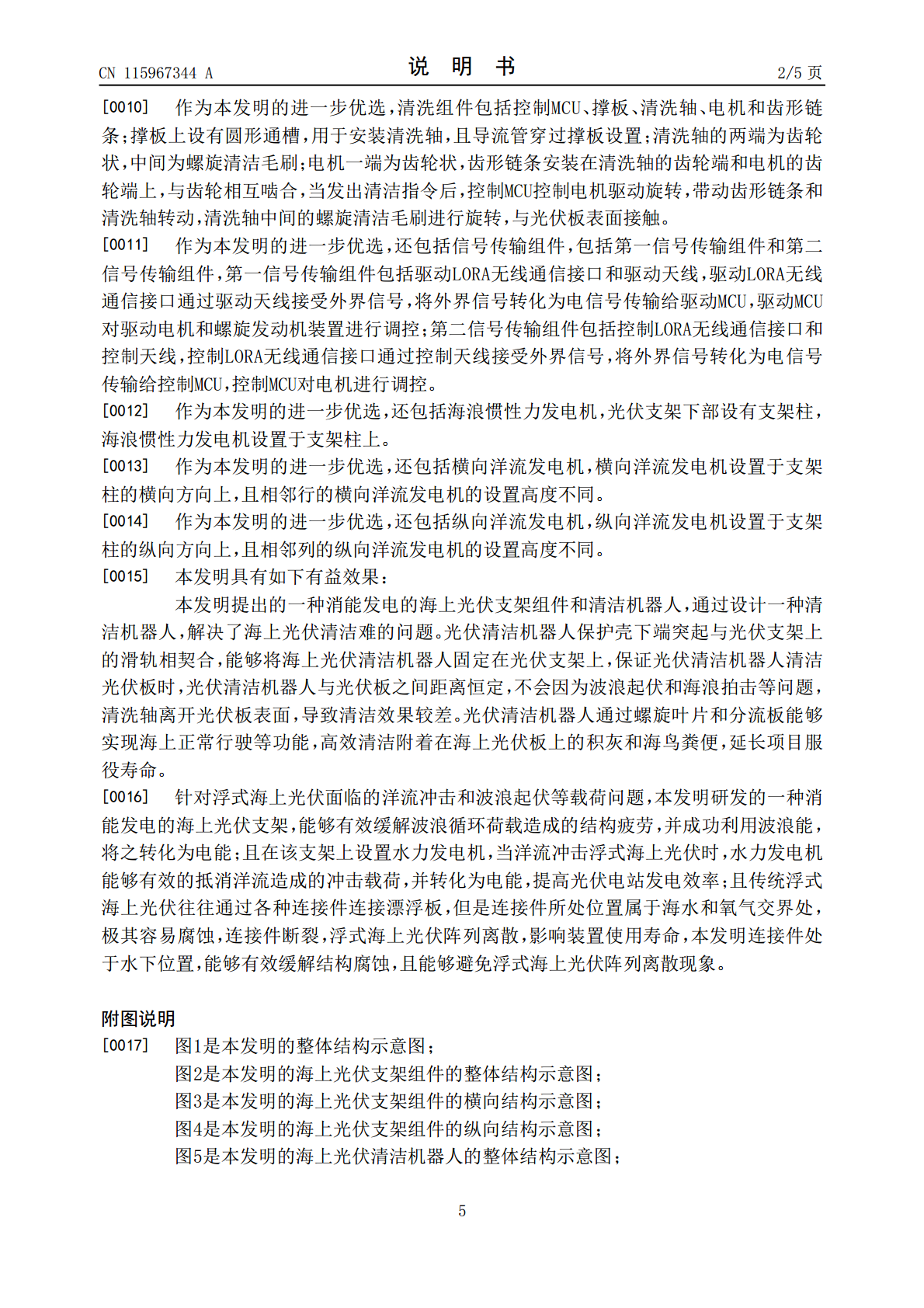
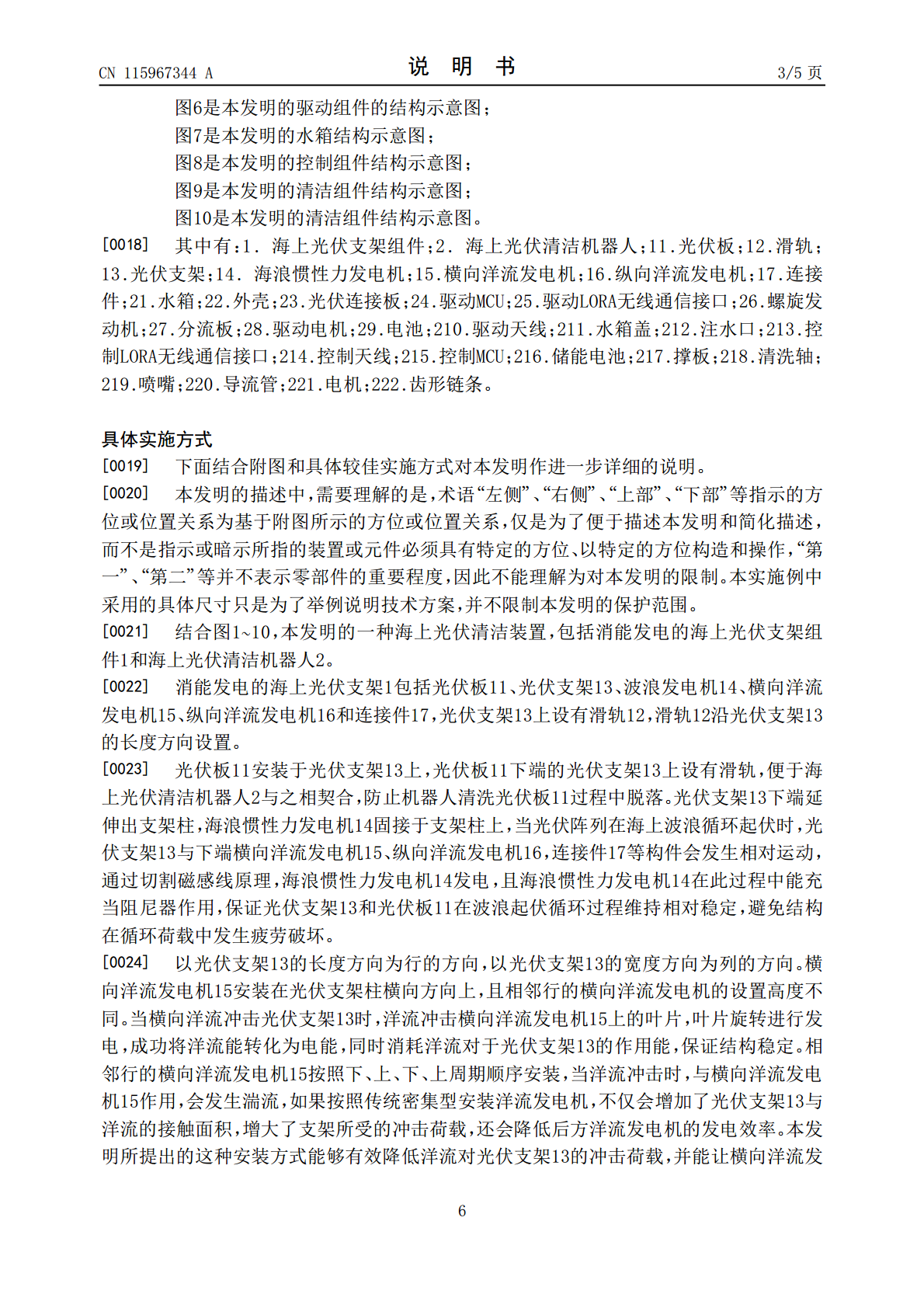
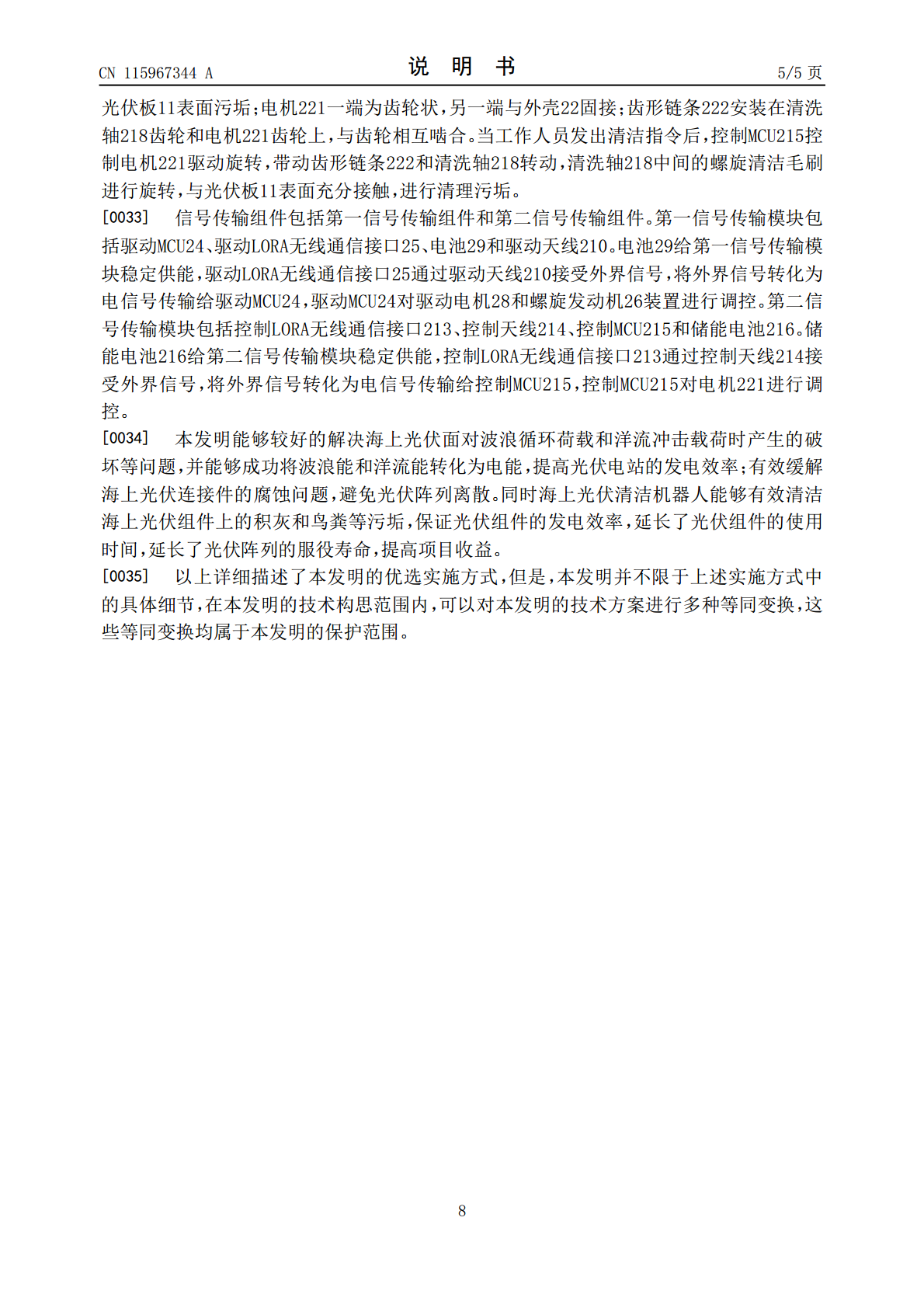
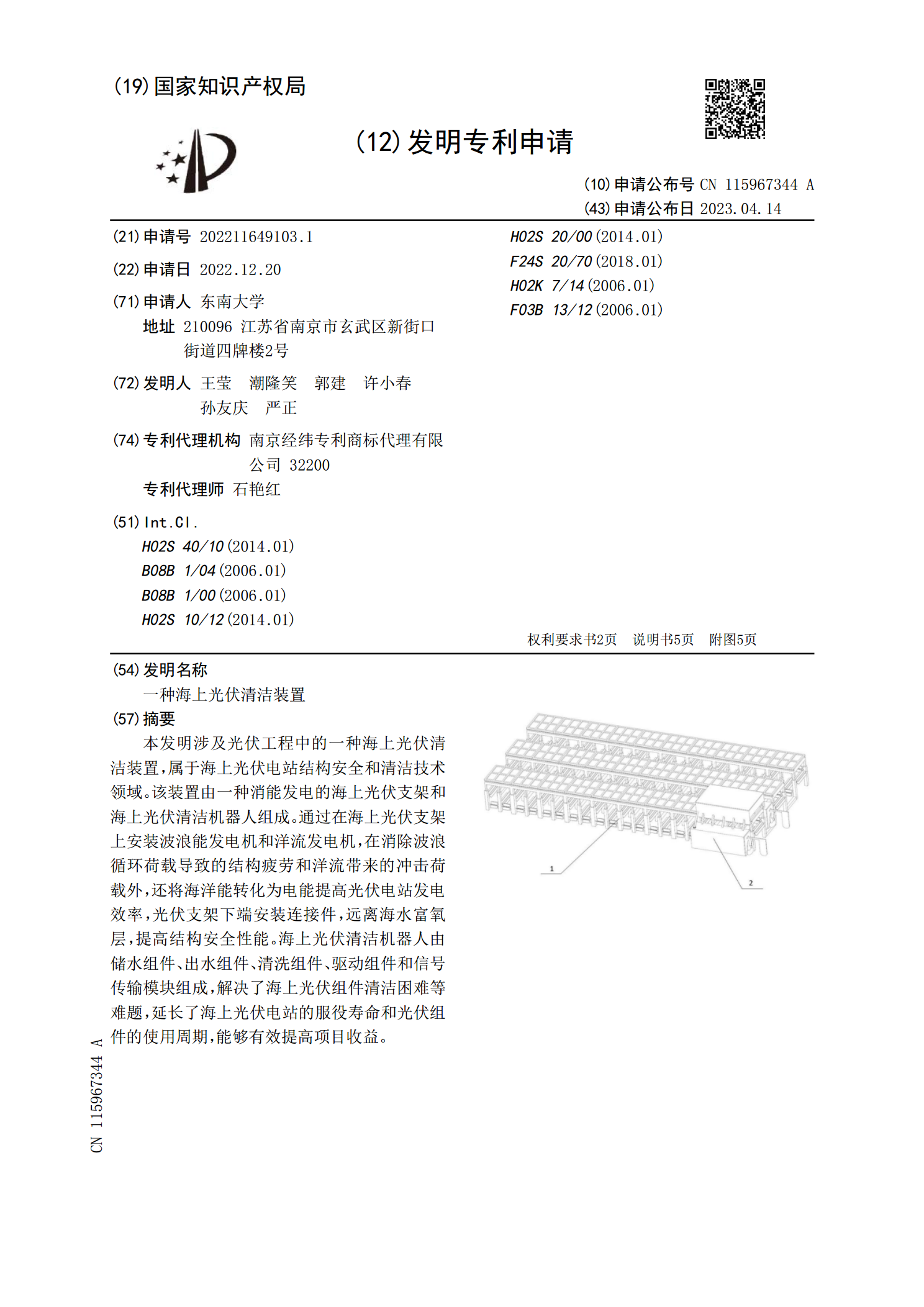
本发明涉及光伏工程中的一种海上光伏清洁装置,属于海上光伏电站结构安全和清洁技术领域。该装置由一种消能发电的海上光伏支架和海上光伏清洁机器人组成。通过在海上光伏支架上安装波浪能发电机和洋流发电机,在消除波浪循环荷载导致的结构疲劳和洋流带来的冲击荷载外,还将海洋能转化为电能提高光伏电站发电效率,光伏支架下端安装连接件,远离海水富氧层,提高结构安全性能。海上光伏清洁机器人由储水组件、出水组件、清洗组件、驱动组件和信号传输模块组成,解决了海上光伏组件清洁困难等难题,延长了海上光伏电站的服役寿命和光伏组件的使用周期
一种水上光伏发电装置.pdf
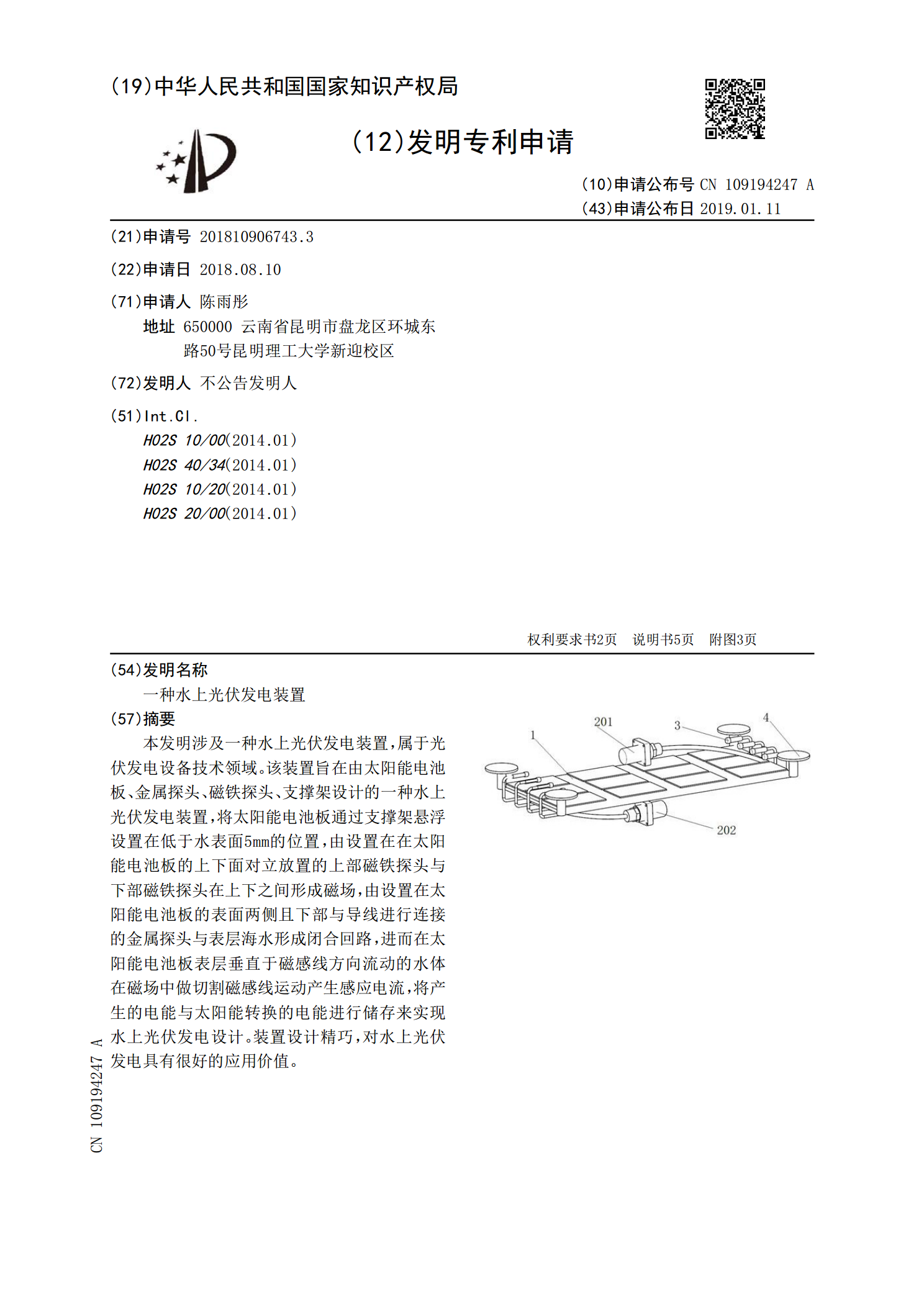
本发明涉及一种水上光伏发电装置,属于光伏发电设备技术领域。该装置旨在由太阳能电池板、金属探头、磁铁探头、支撑架设计的一种水上光伏发电装置,将太阳能电池板通过支撑架悬浮设置在低于水表面5mm的位置,由设置在在太阳能电池板的上下面对立放置的上部磁铁探头与下部磁铁探头在上下之间形成磁场,由设置在太阳能电池板的表面两侧且下部与导线进行连接的金属探头与表层海水形成闭合回路,进而在太阳能电池板表层垂直于磁感线方向流动的水体在磁场中做切割磁感线运动产生感应电流,将产生的电能与太阳能转换的电能进行储存来实现水上光伏发电设
一种水上光伏发电装置.pdf
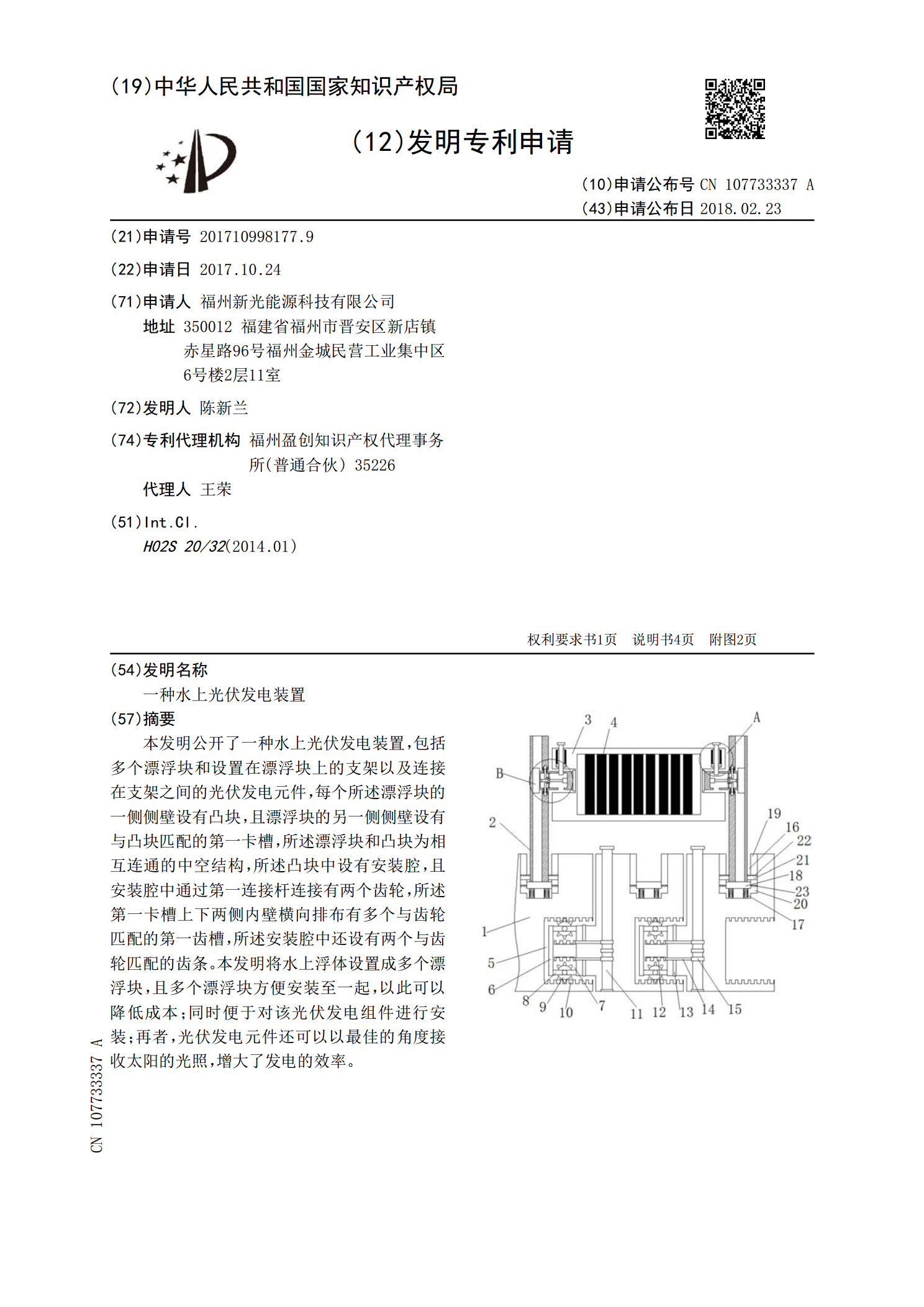
本发明公开了一种水上光伏发电装置,包括多个漂浮块和设置在漂浮块上的支架以及连接在支架之间的光伏发电元件,每个所述漂浮块的一侧侧壁设有凸块,且漂浮块的另一侧侧壁设有与凸块匹配的第一卡槽,所述漂浮块和凸块为相互连通的中空结构,所述凸块中设有安装腔,且安装腔中通过第一连接杆连接有两个齿轮,所述第一卡槽上下两侧内壁横向排布有多个与齿轮匹配的第一齿槽,所述安装腔中还设有两个与齿轮匹配的齿条。本发明将水上浮体设置成多个漂浮块,且多个漂浮块方便安装至一起,以此可以降低成本;同时便于对该光伏发电组件进行安装;再者,光伏发
一种水上光伏自动升降装置.pdf
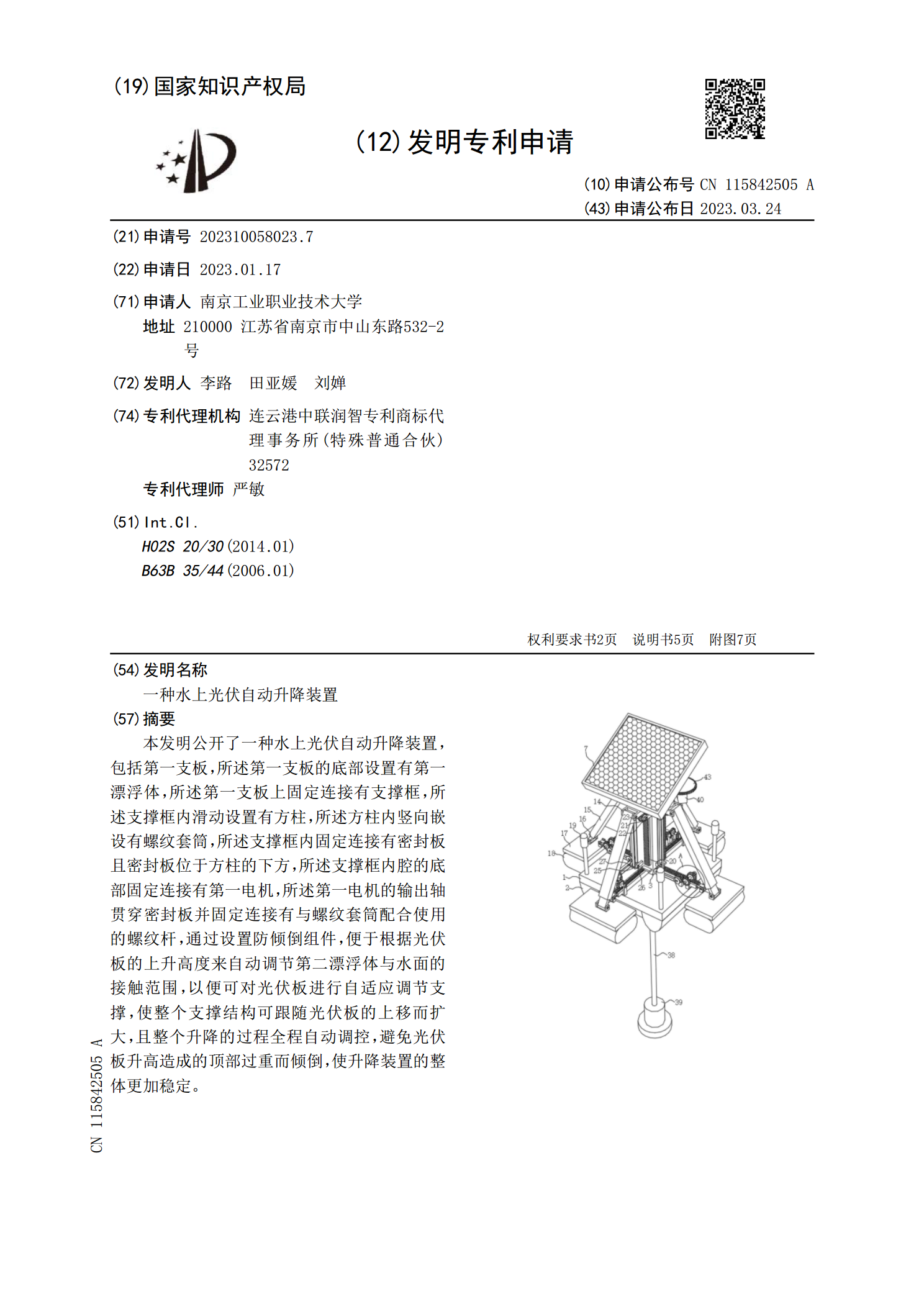
本发明公开了一种水上光伏自动升降装置,包括第一支板,所述第一支板的底部设置有第一漂浮体,所述第一支板上固定连接有支撑框,所述支撑框内滑动设置有方柱,所述方柱内竖向嵌设有螺纹套筒,所述支撑框内固定连接有密封板且密封板位于方柱的下方,所述支撑框内腔的底部固定连接有第一电机,所述第一电机的输出轴贯穿密封板并固定连接有与螺纹套筒配合使用的螺纹杆,通过设置防倾倒组件,便于根据光伏板的上升高度来自动调节第二漂浮体与水面的接触范围,以便可对光伏板进行自适应调节支撑,使整个支撑结构可跟随光伏板的上移而扩大,且整个升降的过
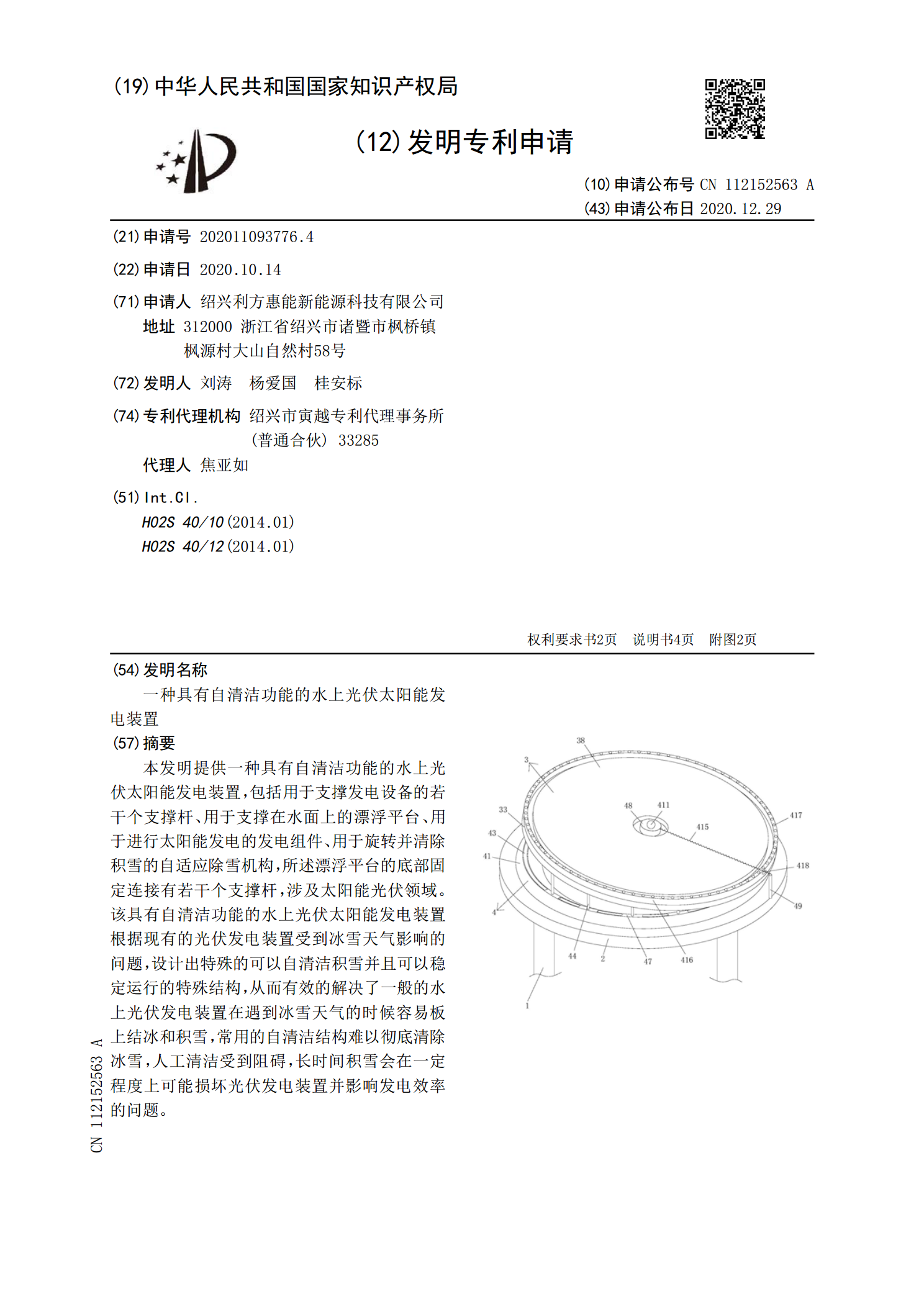
一种具有自清洁功能的水上光伏太阳能发电装置.pdf
本发明提供一种具有自清洁功能的水上光伏太阳能发电装置,包括用于支撑发电设备的若干个支撑杆、用于支撑在水面上的漂浮平台、用于进行太阳能发电的发电组件、用于旋转并清除积雪的自适应除雪机构,所述漂浮平台的底部固定连接有若干个支撑杆,涉及太阳能光伏领域。该具有自清洁功能的水上光伏太阳能发电装置根据现有的光伏发电装置受到冰雪天气影响的问题,设计出特殊的可以自清洁积雪并且可以稳定运行的特殊结构,从而有效的解决了一般的水上光伏发电装置在遇到冰雪天气的时候容易板上结冰和积雪,常用的自清洁结构难以彻底清除冰雪,人工清洁受到