
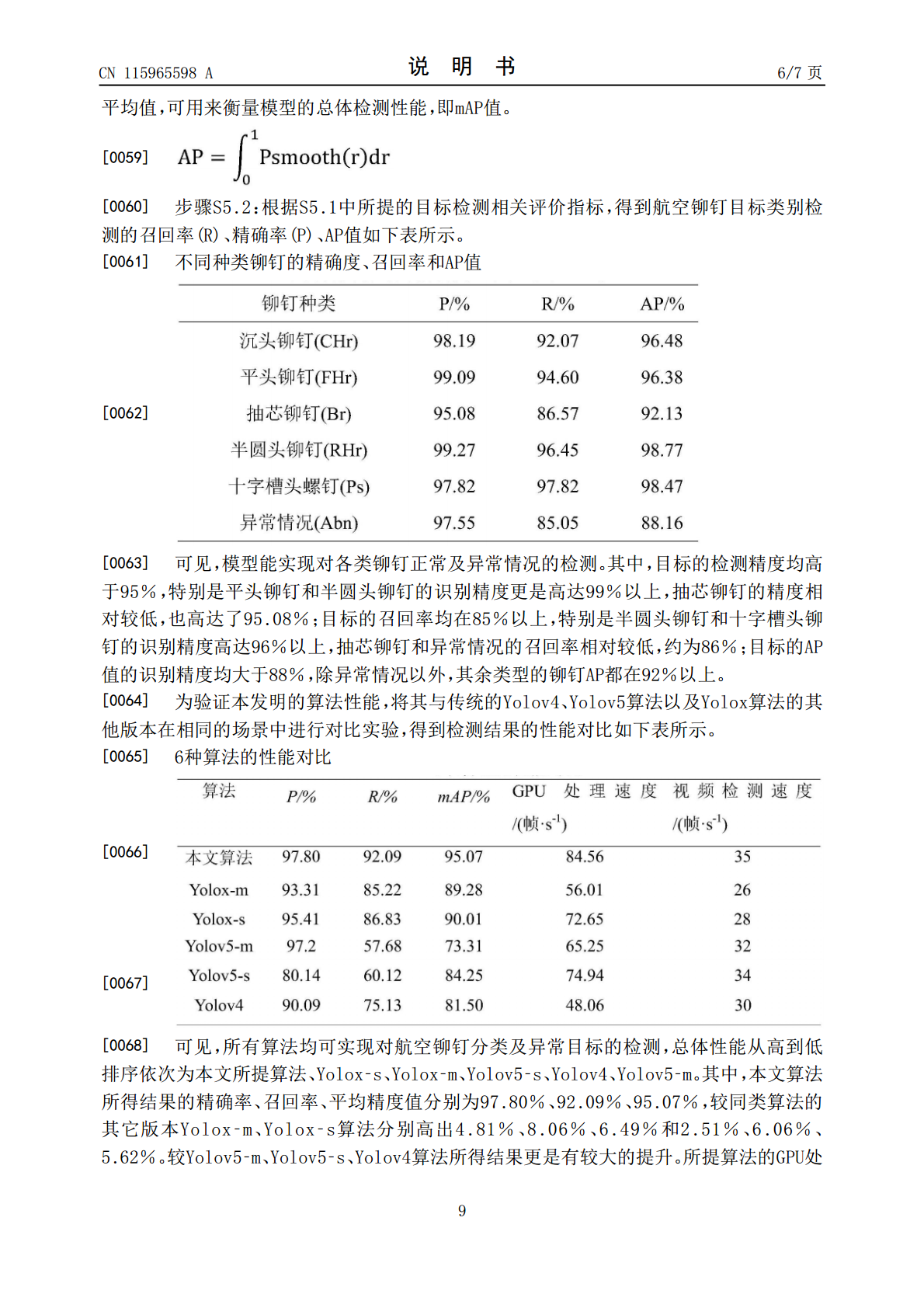
基于深度学习的航空铆钉分类及异常检测方法.pdf

雨星****萌娃

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于深度学习的航空铆钉分类及异常检测方法.pdf
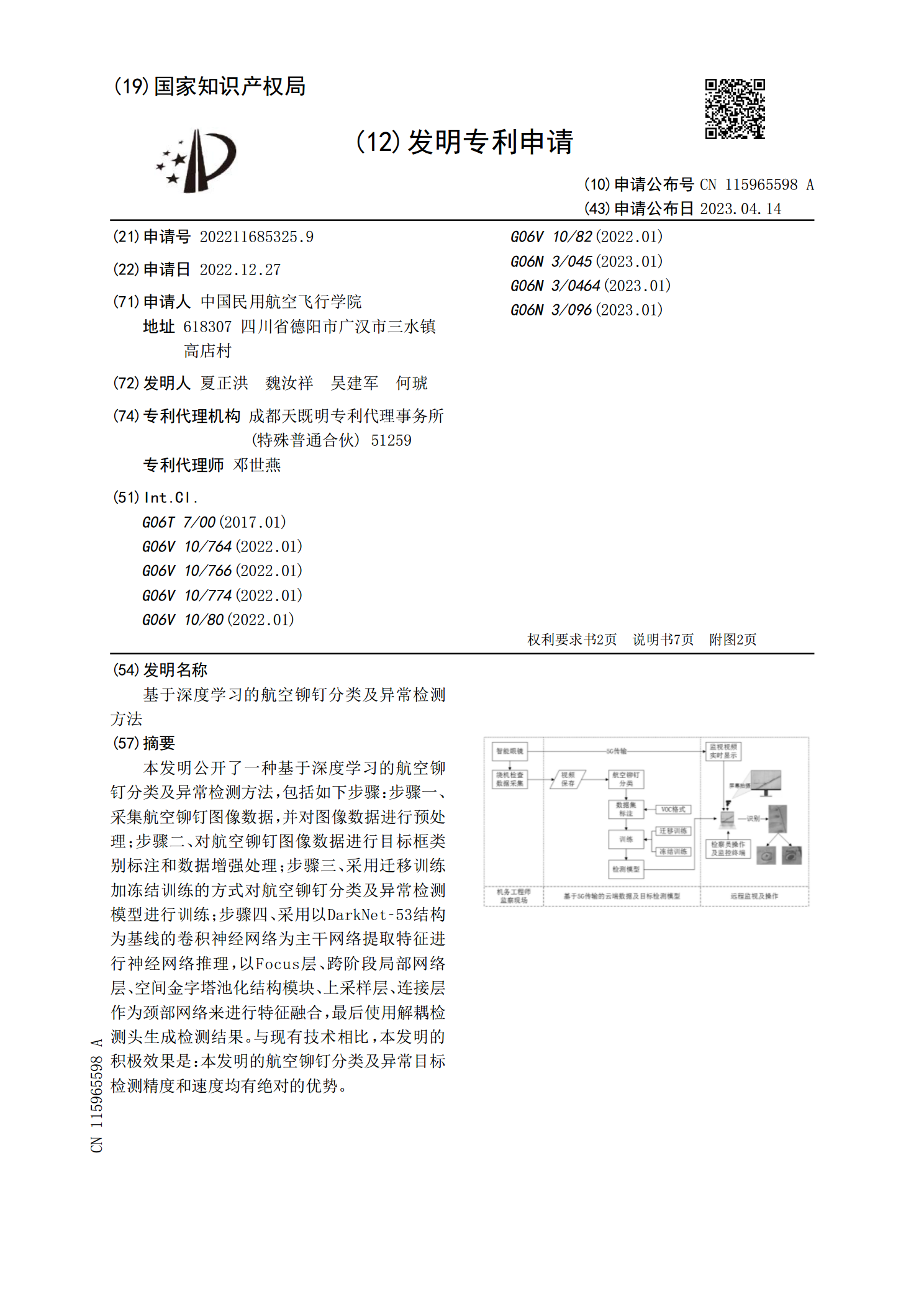
本发明公开了一种基于深度学习的航空铆钉分类及异常检测方法,包括如下步骤:步骤一、采集航空铆钉图像数据,并对图像数据进行预处理;步骤二、对航空铆钉图像数据进行目标框类别标注和数据增强处理;步骤三、采用迁移训练加冻结训练的方式对航空铆钉分类及异常检测模型进行训练;步骤四、采用以DarkNet‑53结构为基线的卷积神经网络为主干网络提取特征进行神经网络推理,以Focus层、跨阶段局部网络层、空间金字塔池化结构模块、上采样层、连接层作为颈部网络来进行特征融合,最后使用解耦检测头生成检测结果。与现有技术相比,本发明

基于深度学习的老人异常行为检测方法.pdf
本发明请求保护一种基于深度学习的老人异常行为检测方法,属于深度学习领域。本发明通过多种传感器采集老人的体征信息、位置信息、图像信息,联合检测联合判断老人的异常行为,降低误判概率。首先根据多种传感器数据进行信号预处理,将处理的数据输入已训练好的BP神经网络获得老人身体状况,然后根据原始图像,对图像进行预处理后送入3D卷积神经网络提取特征向量,通过Softmax分类器识别老人的多种行为,再综合老人位置信息与驻留时长,根据模糊逻辑推理判断老人行为是否异常。本发明采用联合检测方法,通过深度学习,模糊逻辑推理对老人

基于深度学习的日志异常检测方法研究.docx
基于深度学习的日志异常检测方法研究目录一、内容综述................................................2二、文献综述................................................31.日志异常检测的重要性..................................52.传统日志异常检测方法概述..............................53.基于深度学习的日志异常检测方法研究现状.............
基于联邦学习与深度学习的物联网异常检测方法及系统.pdf
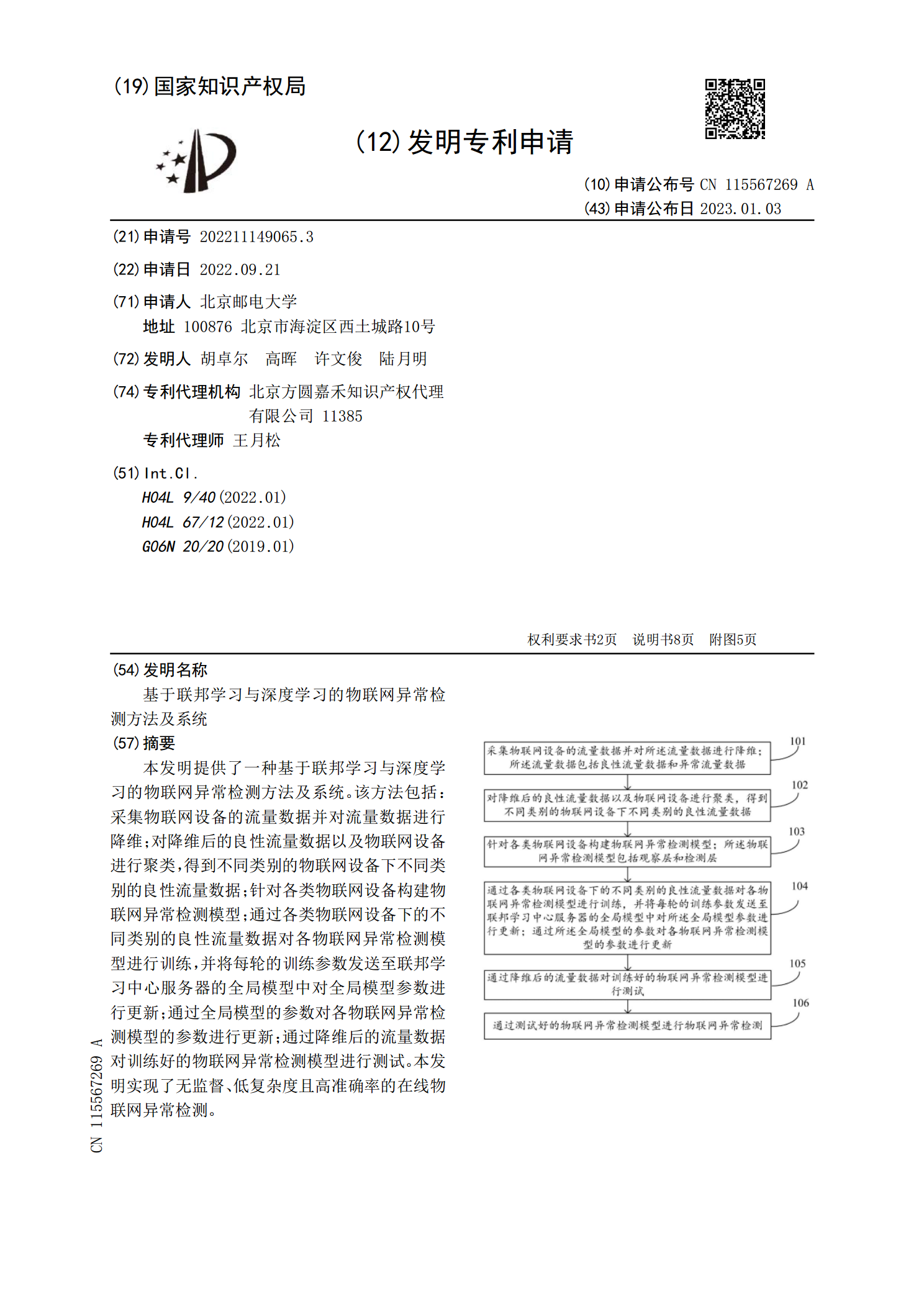
本发明提供了一种基于联邦学习与深度学习的物联网异常检测方法及系统。该方法包括:采集物联网设备的流量数据并对流量数据进行降维;对降维后的良性流量数据以及物联网设备进行聚类,得到不同类别的物联网设备下不同类别的良性流量数据;针对各类物联网设备构建物联网异常检测模型;通过各类物联网设备下的不同类别的良性流量数据对各物联网异常检测模型进行训练,并将每轮的训练参数发送至联邦学习中心服务器的全局模型中对全局模型参数进行更新;通过全局模型的参数对各物联网异常检测模型的参数进行更新;通过降维后的流量数据对训练好的物联网异
基于深度学习的焊点质量异常检测方法、装置、系统.pdf
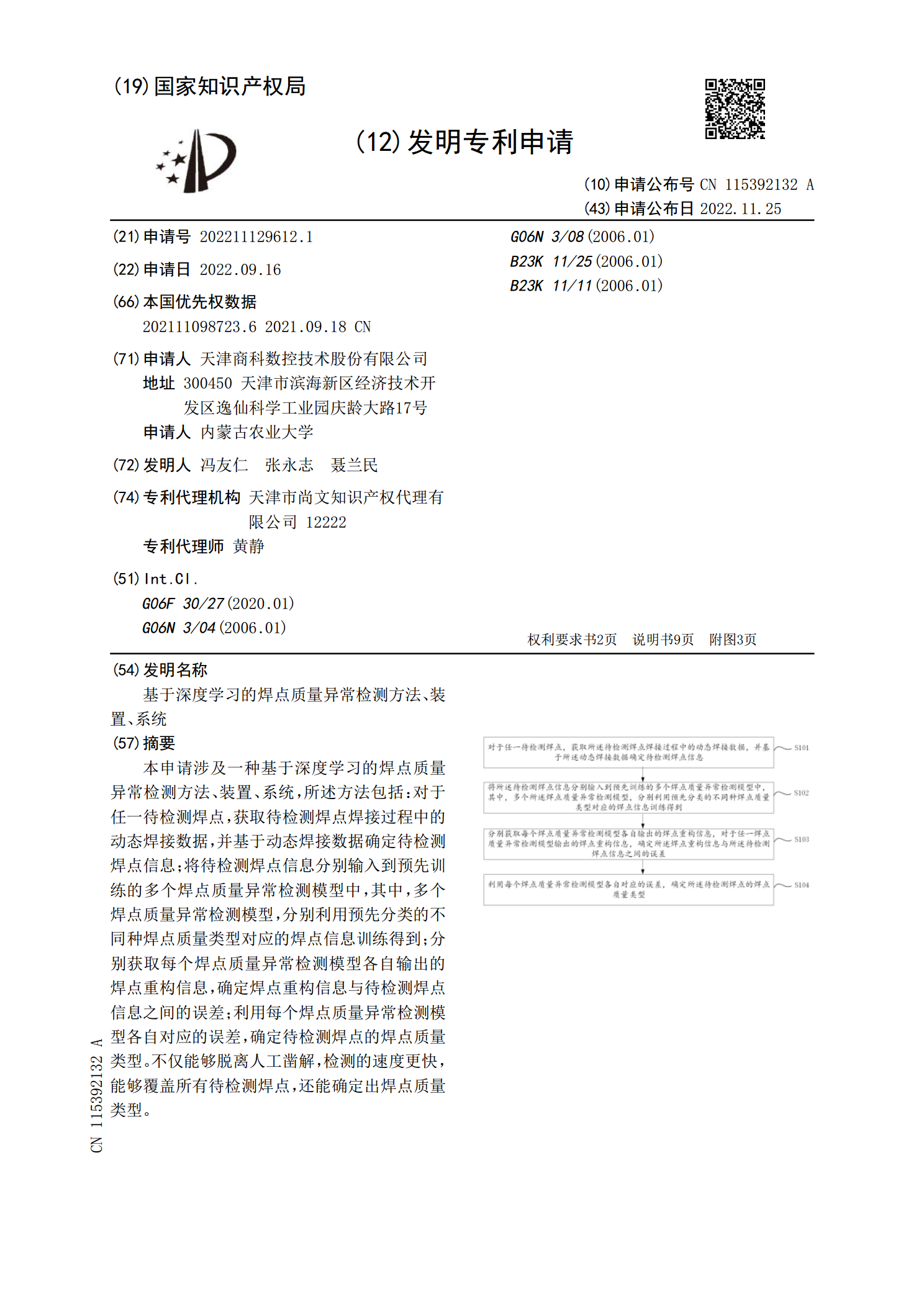
本申请涉及一种基于深度学习的焊点质量异常检测方法、装置、系统,所述方法包括:对于任一待检测焊点,获取待检测焊点焊接过程中的动态焊接数据,并基于动态焊接数据确定待检测焊点信息;将待检测焊点信息分别输入到预先训练的多个焊点质量异常检测模型中,其中,多个焊点质量异常检测模型,分别利用预先分类的不同种焊点质量类型对应的焊点信息训练得到;分别获取每个焊点质量异常检测模型各自输出的焊点重构信息,确定焊点重构信息与待检测焊点信息之间的误差;利用每个焊点质量异常检测模型各自对应的误差,确定待检测焊点的焊点质量类型。不仅能