
一种新型三自由度混联上肢康复机器人.pdf

宜然****找我


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型三自由度混联上肢康复机器人.pdf
本发明涉及一种新型三自由度混联上肢康复机器人,包括静平台、底座、第一固定块、支撑架、第二固定螺栓、滑块、第一固定螺栓、搭扣锁、脚踏板、高拉环、手柄、第二固定块、拉伸装置、低拉环、弹力绳、弹簧、手握拉绳、上肢拉伸绳、脚踏垫、上动平台、推拉滑块、固定盘、可调整装置、副支架、第三固定螺栓、主支架、螺帽、滑槽、螺孔以及下动平台,滑槽两端设有螺孔,高拉环与拉伸装置相连接,低拉环通过弹力绳与上肢拉伸绳相连接,固定盘右端设有搭扣锁。本发明一方面可以有效的为患者使用混联上肢康复机器人时得到较好的腕关节和前臂训练,另一方面
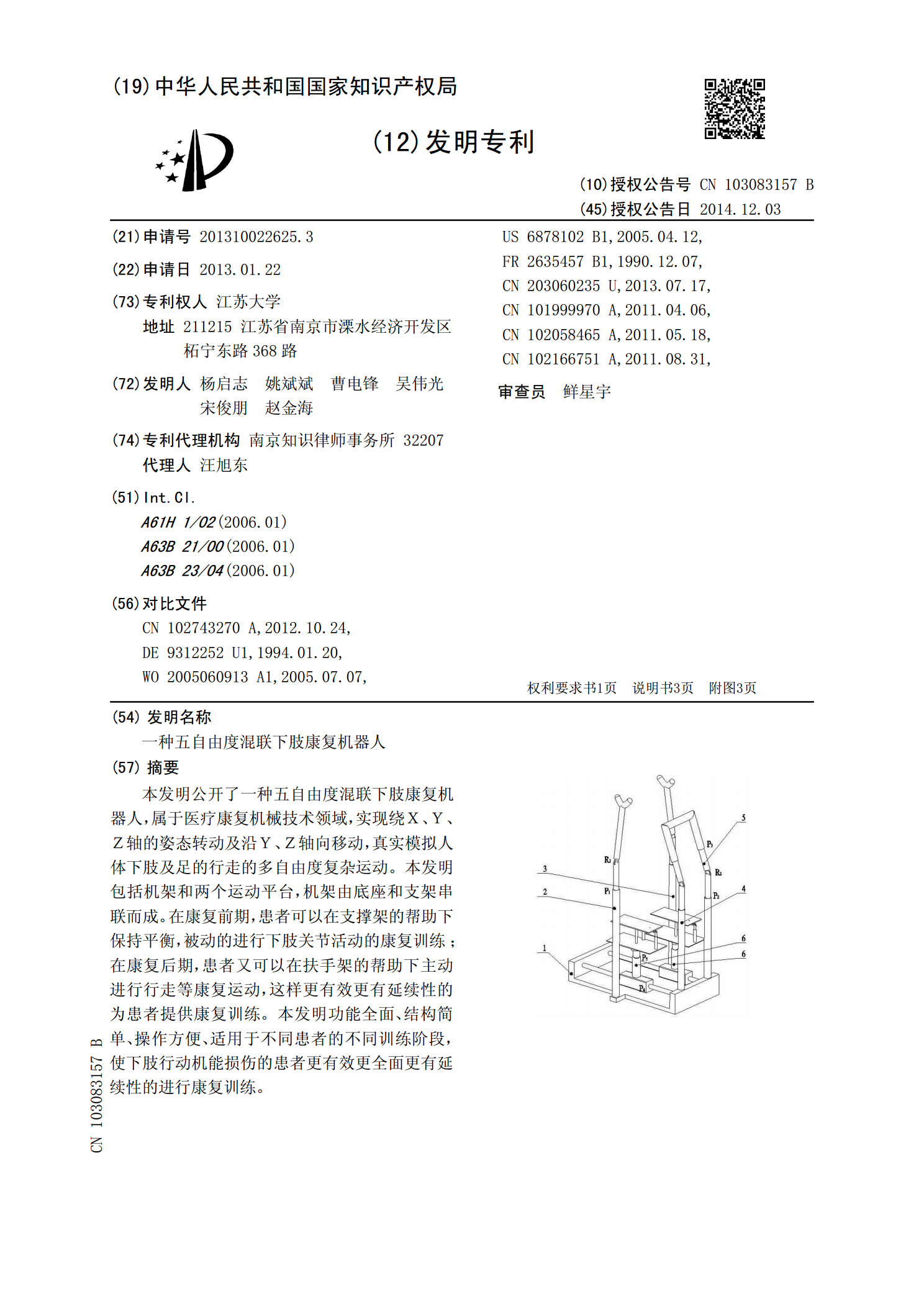
一种五自由度混联下肢康复机器人.pdf
本发明公开了一种五自由度混联下肢康复机器人,属于医疗康复机械技术领域,实现绕X、Y、Z轴的姿态转动及沿Y、Z轴向移动,真实模拟人体下肢及足的行走的多自由度复杂运动。本发明包括机架和两个运动平台,机架由底座和支架串联而成。在康复前期,患者可以在支撑架的帮助下保持平衡,被动的进行下肢关节活动的康复训练;在康复后期,患者又可以在扶手架的帮助下主动进行行走等康复运动,这样更有效更有延续性的为患者提供康复训练。本发明功能全面、结构简单、操作方便、适用于不同患者的不同训练阶段,使下肢行动机能损伤的患者更有效更全面更有

三自由度上肢康复机器人研制.docx
三自由度上肢康复机器人研制标题:三自由度上肢康复机器人的研制与应用摘要:随着人口老龄化程度的不断加剧,上肢功能障碍的发生率也逐渐增加。传统的康复治疗方法存在人力资源短缺、难以精确控制运动等问题。近年来,三自由度上肢康复机器人的研制与应用成为热门研究领域。本文将详细介绍三自由度上肢康复机器人的研发背景、系统设计原理和性能评价方法,并探讨其在康复治疗中的应用前景。一、引言随着人口老龄化及各种疾病的高发,上肢功能障碍已经成为一个普遍存在的问题。传统的康复治疗方法无法满足庞大康复需求,因此研发高效、精确的康复机器

一种新型的五自由度混联抛光机器人的分析.docx
一种新型的五自由度混联抛光机器人的分析标题:五自由度混联抛光机器人的分析引言:随着科技的不断发展,机器人技术在工业领域的应用日益广泛。其中,混联抛光机器人作为一种新型的自动化设备,具备高效、精准、重复性等优势,被广泛应用于金属、陶瓷、塑料等制造领域。本论文旨在对五自由度混联抛光机器人进行分析,并探讨其工作原理、应用领域以及未来发展方向。一、机器人工作原理:五自由度混联抛光机器人采用机械和电器混联控制方式,由五个关节驱动器、执行器和传感器等组成。通过精确的控制系统,实现机器人的移动、旋转和抛光等操作。其工作
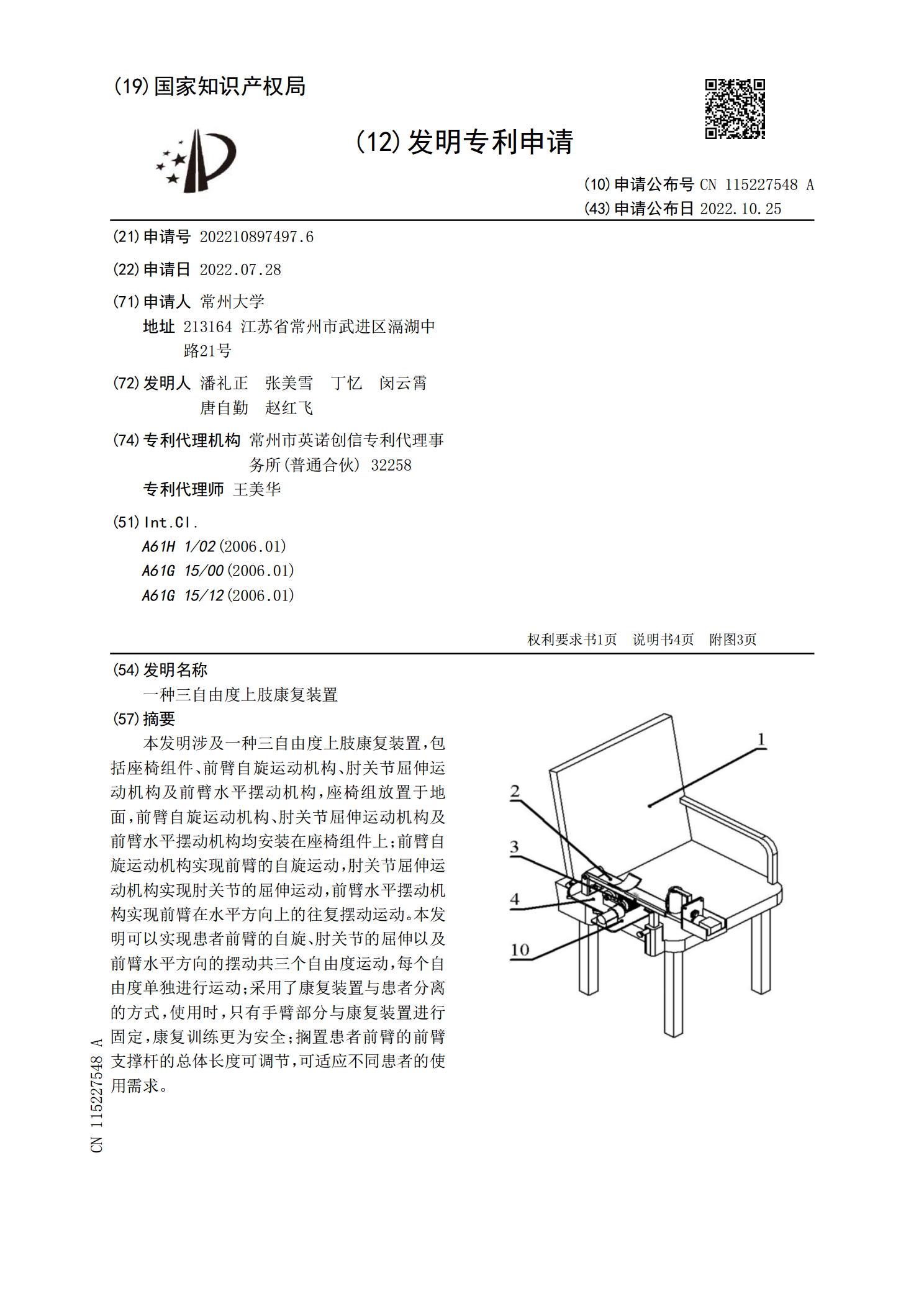
一种三自由度上肢康复装置.pdf
本发明涉及一种三自由度上肢康复装置,包括座椅组件、前臂自旋运动机构、肘关节屈伸运动机构及前臂水平摆动机构,座椅组放置于地面,前臂自旋运动机构、肘关节屈伸运动机构及前臂水平摆动机构均安装在座椅组件上;前臂自旋运动机构实现前臂的自旋运动,肘关节屈伸运动机构实现肘关节的屈伸运动,前臂水平摆动机构实现前臂在水平方向上的往复摆动运动。本发明可以实现患者前臂的自旋、肘关节的屈伸以及前臂水平方向的摆动共三个自由度运动,每个自由度单独进行运动;采用了康复装置与患者分离的方式,使用时,只有手臂部分与康复装置进行固定,康复训