
一种低熔点合金变刚度温度控制方法及结构和软体机械手.pdf

一吃****仕龙

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种低熔点合金变刚度温度控制方法及结构和软体机械手.pdf
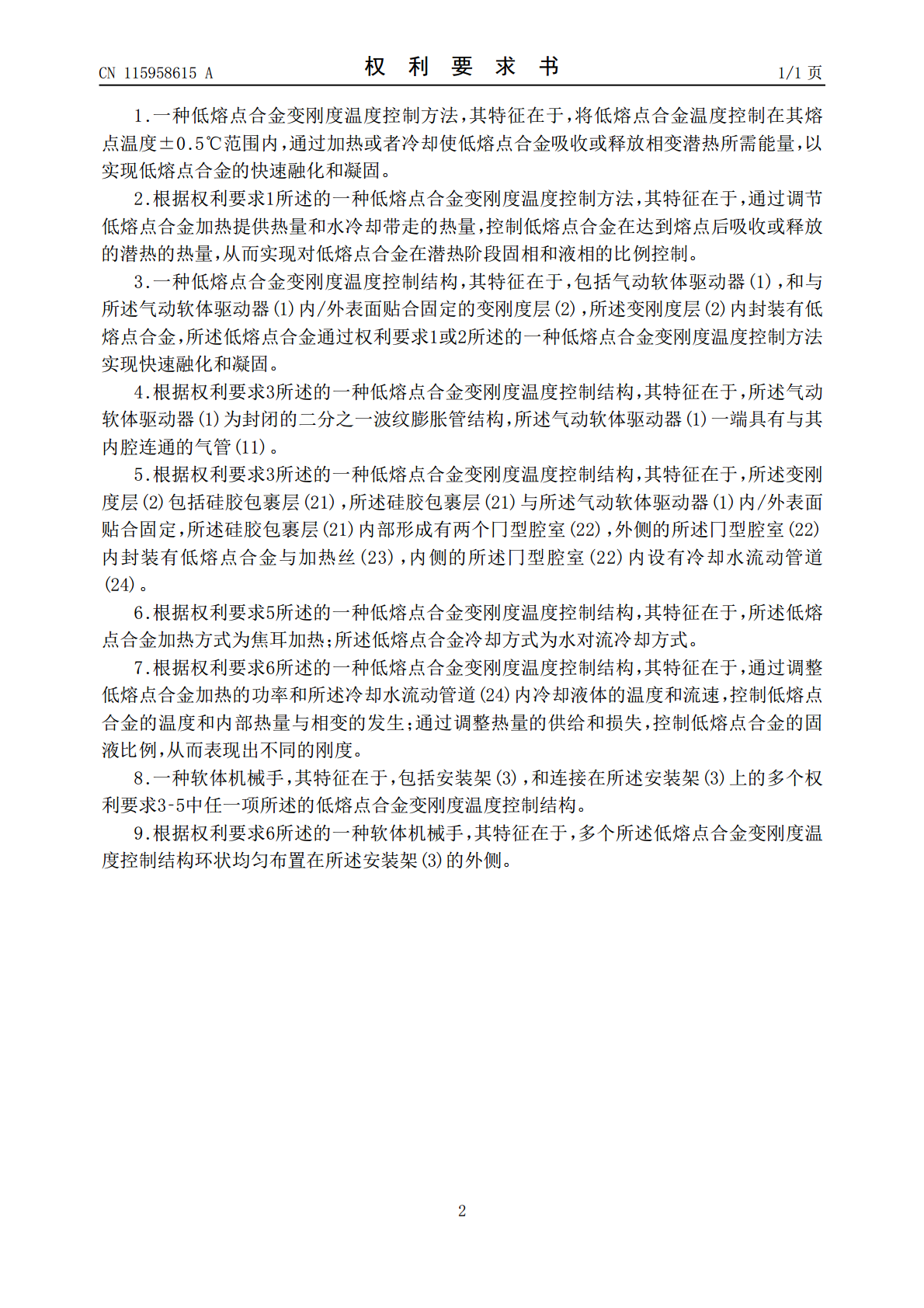
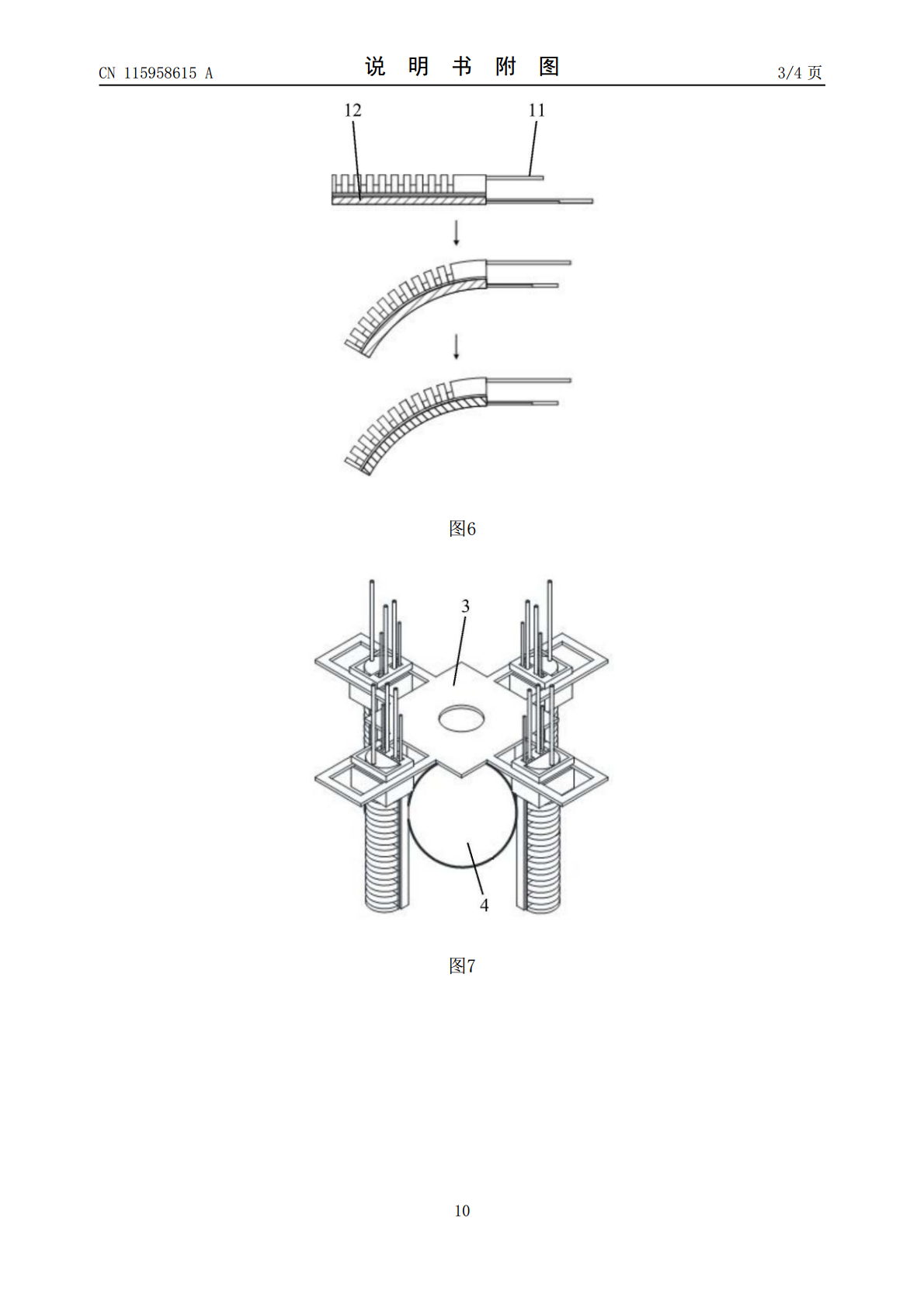
本发明公开了一种低熔点合金变刚度温度控制方法及结构和软体机械手,包括安装架和连接在安装架上的多个低熔点合金变刚度温度控制结构;低熔点合金变刚度温度控制结构包括气动软体驱动器,和与气动软体驱动器内/外表面贴合固定的变刚度层,变刚度层内封装有低熔点合金;将低熔点合金温度控制在其熔点温度±0.5℃范围内,通过加热或者冷却使低熔点合金吸收或释放相变潜热所需能量,以实现低熔点合金的快速融化和凝固。本发明针对软体机械结构主流的干扰变刚度方式刚度小与低熔点合金变刚度方式反应慢的缺陷,合金只需在吸收或者释放潜热和使合金升

基于低熔点合金相变的变刚度软体机械臂稳态传热研究.docx
基于低熔点合金相变的变刚度软体机械臂稳态传热研究摘要本文研究了基于低熔点合金相变的变刚度软体机械臂稳态传热问题,主要包括低熔点合金的选材、相变过程的数值模拟、机械臂的结构设计和稳态传热性能的实验研究。研究结果表明,低熔点合金在相变时可以吸收和释放大量的潜热,从而实现机械臂刚度的可调节性,同时还能提高机械臂的传热性能。本文的研究成果对于开发具有可调节刚度和高传热性能的软体机械臂具有一定的指导意义。关键词:低熔点合金,相变,机械臂,刚度,传热性能。AbstractThispaperstudiesthestea

一种具有多抓取模式的变刚度软体机械手.pdf
本发明公开了一种具有多抓取模式的变刚度软体机械手,解决了现有的变刚度软体机械手结构复杂、制备工艺繁琐、刚度调节及变形存在干扰以及抓取模式单一的缺点。在基座的前后两侧交替布置由3根尺寸相同的变刚度软体手指,基座的左侧布置有对变刚度软体手指近端关节进行刚度调节的弹簧驱动机构,右侧布置有对变刚度软体手指远端关节进行刚度调节的弹簧驱动机构及对手指本体进行驱动的驱动机构。弹簧驱动机构中的舵机输出端及驱动电机的输出端都安装有驱动轴,弹簧驱动机构的驱动线缆一端与驱动轴相连,另一端连接于弹簧上。手指本体的驱动线缆通过U型
一种低熔点合金及其制备方法.pdf
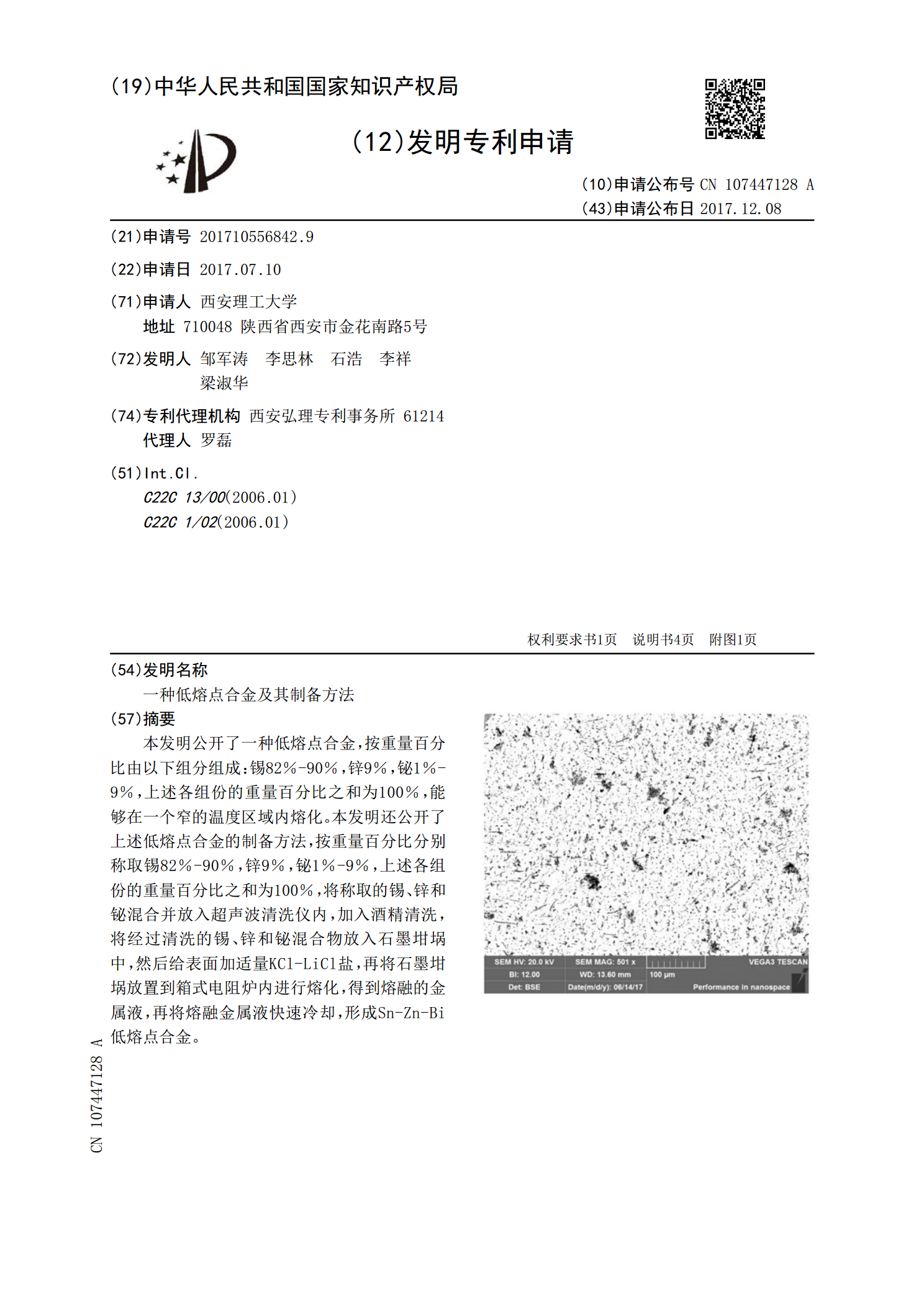
本发明公开了一种低熔点合金,按重量百分比由以下组分组成:锡82%‑90%,锌9%,铋1%‑9%,上述各组份的重量百分比之和为100%,能够在一个窄的温度区域内熔化。本发明还公开了上述低熔点合金的制备方法,按重量百分比分别称取锡82%‑90%,锌9%,铋1%‑9%,上述各组份的重量百分比之和为100%,将称取的锡、锌和铋混合并放入超声波清洗仪内,加入酒精清洗,将经过清洗的锡、锌和铋混合物放入石墨坩埚中,然后给表面加适量KCl‑LiCl盐,再将石墨坩埚放置到箱式电阻炉内进行熔化,得到熔融的金属液,再将熔融金属

低熔点合金的成型方法.docx
低熔点合金的成型方法低熔点合金成型方法引言:低熔点合金是一种具有较低熔点的合金,通常在室温或较低温度下能够液化。这些合金具有许多优异的特性,例如低熔点、高可塑性和热导率等。因此,低熔点合金在许多工业领域中被广泛应用,如航空航天、电子、汽车和医疗设备制造等。本文将介绍低熔点合金的成型方法,包括压铸、金属注射成型和3D打印等。一、压铸成型压铸是低熔点合金最常用的成型方法之一。这种方法使用一个金属模具,在模具中加热并注入熔化的低熔点合金。随后,高压被施加在熔化的合金上,使其充满模具中的空腔,并在冷却过程中凝固。