
基于双模涡旋光束的横向速度测量方法及系统.pdf

小宏****aa


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于双模涡旋光束的横向速度测量方法及系统.pdf
基于双模涡旋光束的横向速度测量方法及系统,属于激光测速领域,本发明为解决现有技术无法对目标横向速度的方向和大小进行准确测量的问题。本发明方法包括:S1、将激光进行空间相位调制生成1阶与4阶的双阶叠加态涡旋光束作为调制信号,其调制光场呈包括三个横向多普勒效应光斑的三瓣状结构;S2、筛选出1级衍射调制信号并由发射系统发射出去,照射至运动目标生成回波信号,回波信号包含三个横向多普勒效应光斑区域;S3、接收系统将回波信号加载至阵列探测器,获取回波光场的三个横向多普勒效应光斑区域;S4、通过示波器得到三个光斑区域每

一种基于拼接涡旋光束的转轴测量方法.pdf
本发明涉及一种基于拼接涡旋光束的转轴测量方法。基于完整涡旋光束的旋转多普勒效应已被广泛应用于转速测量,但均不能确定被探测物体旋转中心,非完整涡旋光束由于打破了光束的圆对称性,因此能够对被探测物体转轴位置敏感。在此基础上,通过在不同方位角向加载不同拓扑荷数的非完整涡旋光束产生拼接涡旋光束,提出了一种基于拼接涡旋光束的转轴测量方法。首先利用偏振片调整偏振方向,产生线性偏振光束,其次调节全息图的相位结构,得到不同方位角范围内具有不同拓扑荷数的拼接涡旋光束全息图,加载到空间光调制器上,之后,将线性偏振光束照射在空

基于圆偏振涡旋光束强聚焦的平顶光束的构成.docx
基于圆偏振涡旋光束强聚焦的平顶光束的构成基于圆偏振涡旋光束强聚焦的平顶光束构成摘要:随着科技的不断进步,光学领域的研究也日趋深入。光束的聚焦是光学研究中的一个重要课题。本文将重点讨论基于圆偏振涡旋光束强聚焦的平顶光束的构成。首先介绍圆偏振涡旋光束的特性和性质,接着探讨涡旋光束的产生方法。然后,分析光束的聚焦过程,并详细介绍平顶光束的构成原理。最后,对基于圆偏振涡旋光束强聚焦的平顶光束在光学应用方面的潜在应用进行了展望。关键词:圆偏振涡旋光束;聚焦;平顶光束;光学应用1.引言光束的聚焦是光学研究中的核心问题
一种基于涡旋光束的旋转体角速度测量系统.pdf
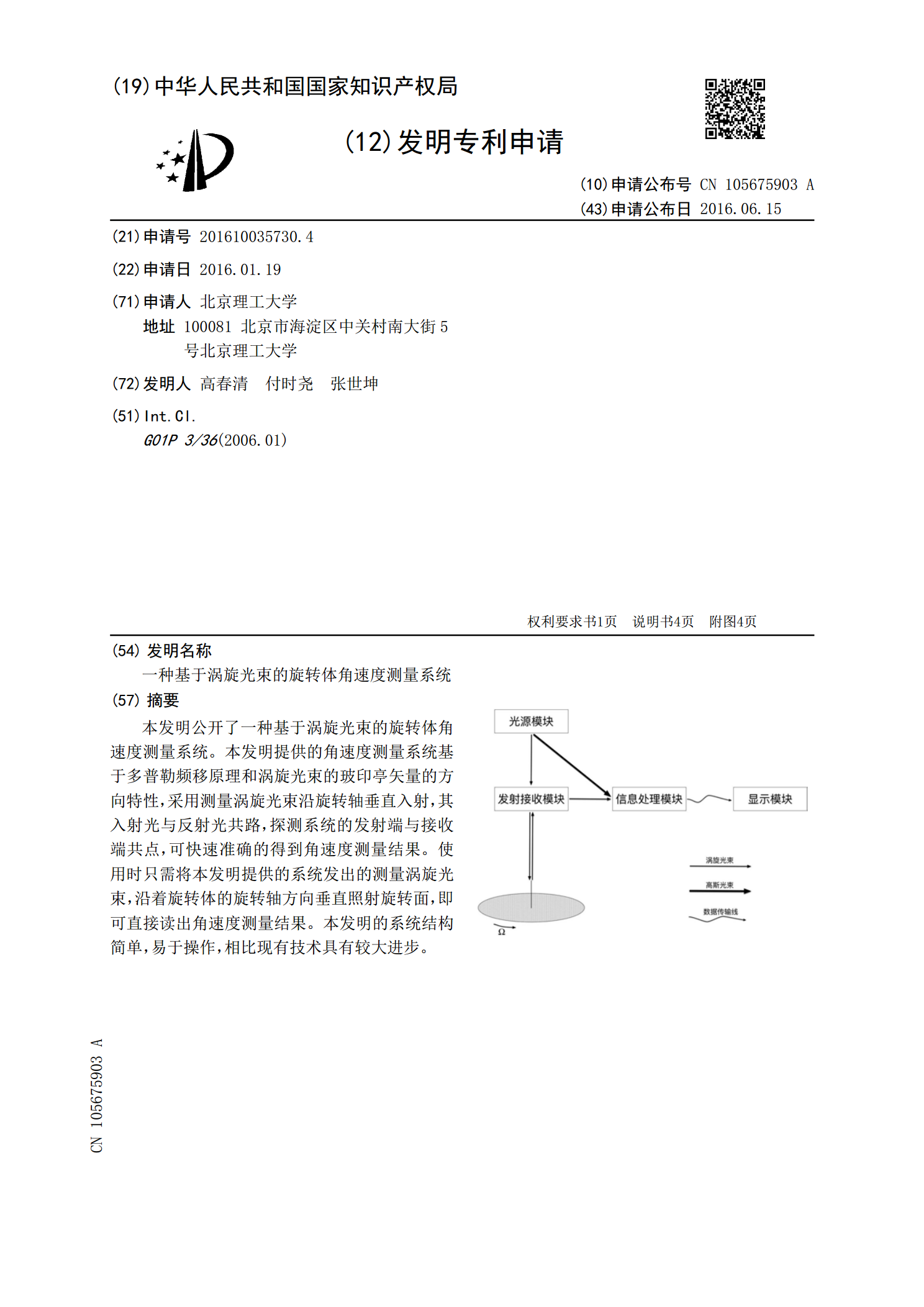
本发明公开了一种基于涡旋光束的旋转体角速度测量系统。本发明提供的角速度测量系统基于多普勒频移原理和涡旋光束的玻印亭矢量的方向特性,采用测量涡旋光束沿旋转轴垂直入射,其入射光与反射光共路,探测系统的发射端与接收端共点,可快速准确的得到角速度测量结果。使用时只需将本发明提供的系统发出的测量涡旋光束,沿着旋转体的旋转轴方向垂直照射旋转面,即可直接读出角速度测量结果。本发明的系统结构简单,易于操作,相比现有技术具有较大进步。

基于Thue-Morse透镜的轴向多涡旋光束.docx
基于Thue-Morse透镜的轴向多涡旋光束基于Thue-Morse透镜的轴向多涡旋光束摘要:光学在科学和工程领域中具有广泛的应用。近年来出现的新材料和新技术为光学领域带来了许多新的发展机会。其中,轴向多涡旋光束的研究引起了广泛的关注。本文基于Thue-Morse透镜,研究了轴向多涡旋光束的特性和应用。通过数值模拟和实验结果,我们发现使用Thue-Morse透镜可以有效生成和控制多涡旋光束。该研究对光学领域的进一步发展具有重要意义。引言:光学是研究光的产生、传播、检测和应用的科学。近年来,随着光学领域的发