
一种泥石流冲积模拟实验堆积体表面重构系统.pdf

小沛****文章


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种泥石流冲积模拟实验堆积体表面重构系统.pdf
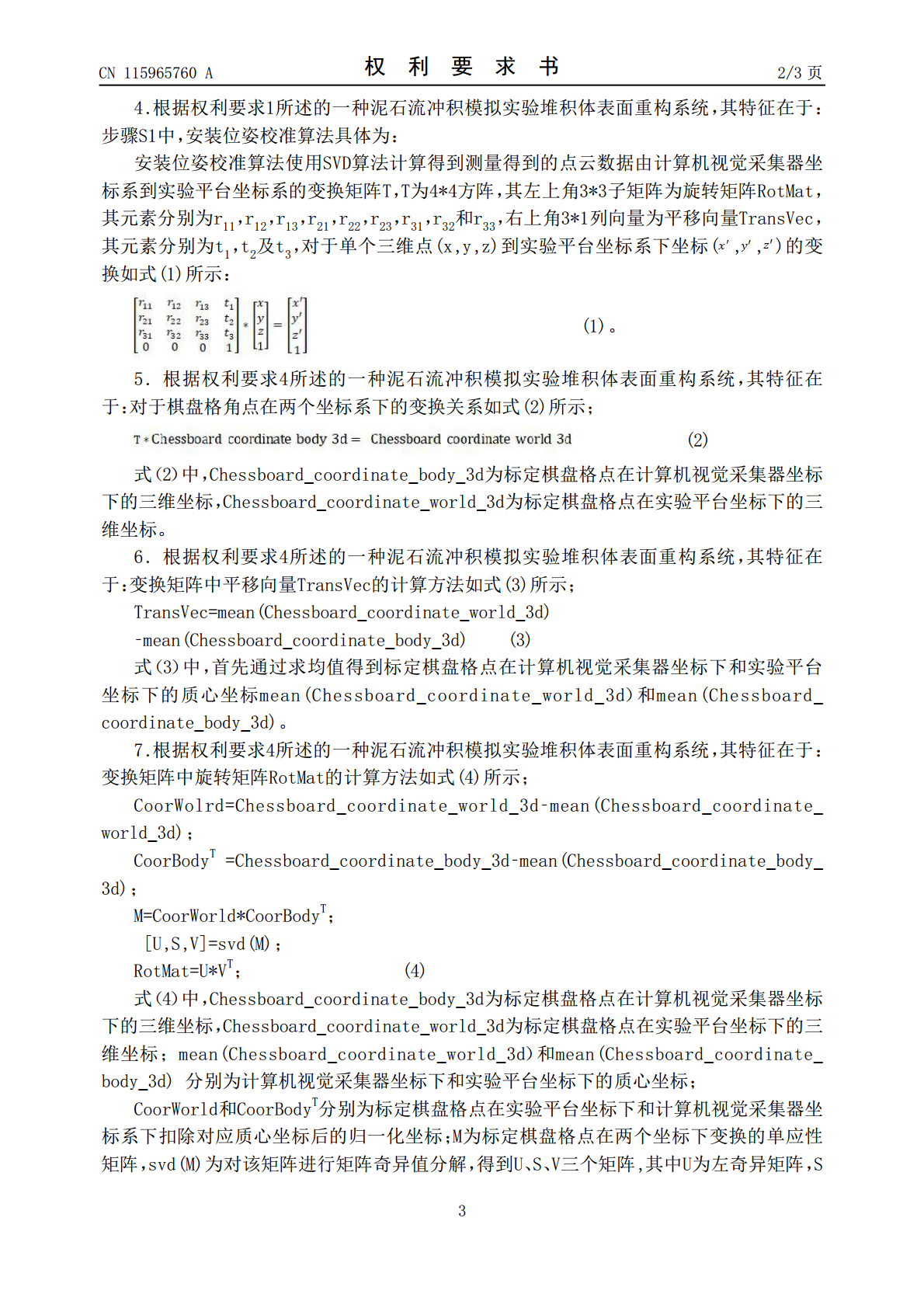
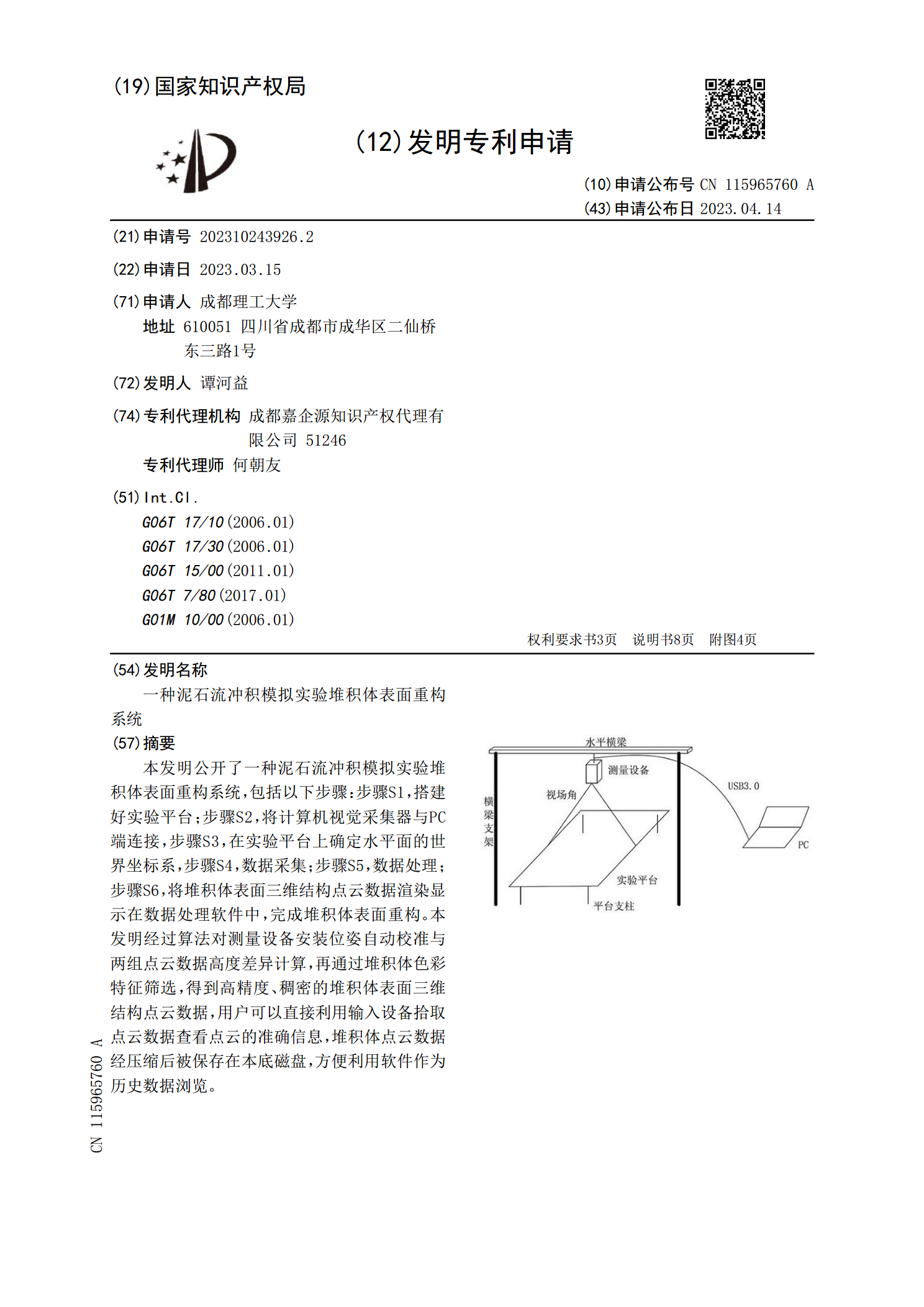
本发明公开了一种泥石流冲积模拟实验堆积体表面重构系统,包括以下步骤:步骤S1,搭建好实验平台;步骤S2,将计算机视觉采集器与PC端连接,步骤S3,在实验平台上确定水平面的世界坐标系,步骤S4,数据采集;步骤S5,数据处理;步骤S6,将堆积体表面三维结构点云数据渲染显示在数据处理软件中,完成堆积体表面重构。本发明经过算法对测量设备安装位姿自动校准与两组点云数据高度差异计算,再通过堆积体色彩特征筛选,得到高精度、稠密的堆积体表面三维结构点云数据,用户可以直接利用输入设备拾取点云数据查看点云的准确信息,堆积体点

泥石流模拟实验.ppt
泥石流1、降水量少:在土质山谷模型的坡面洒水现象:________________________是山区由于暴雨、冰雪融水激发含有大量泥沙、石块的特殊洪流。1、降水量少:在土质山谷模型的坡面洒水现象:________________________请你分析表层有大量松散的土和石块请你分析活动二:探究人类活动影响泥石流的形成活动二:探究人类活动影响泥石流的形成时间:2010年8月7日22点左右泥石流给该地区带来了哪些危害?逃生指南灾后重建1、治水工程市民的心声小结A2、山上发生了泥石流,而此时你恰好在泥石流

一种基于相干扫描干涉系统的变焦显微表面重构方法.pdf
本发明涉及一种基于相干扫描干涉系统的变焦显微表面重构方法,包括如下步骤:1:获取表面扫描干涉三维信号;2:对三维信号进行三维傅立叶变换获取其三维频谱;3:从三维频谱中提取变焦显微成像信号频谱;4:对变焦显微成像信号频谱做三维傅立叶逆变换获取三维变焦显微图像;5:通过变焦显微表面重构算法获取表面形貌。本发明利用相干扫描干涉图中的干涉信号与变焦显微成像信号在三维频谱中的可分离性,获取相干扫描干涉成像中的三维变焦显微信号,最终通过变焦显微表面重构算法获取表面形貌,提高了相干扫描干涉仪对极粗糙表面、大倾角和垂直表
一种可重构全息超表面辅助的双连接组网系统及方法.pdf
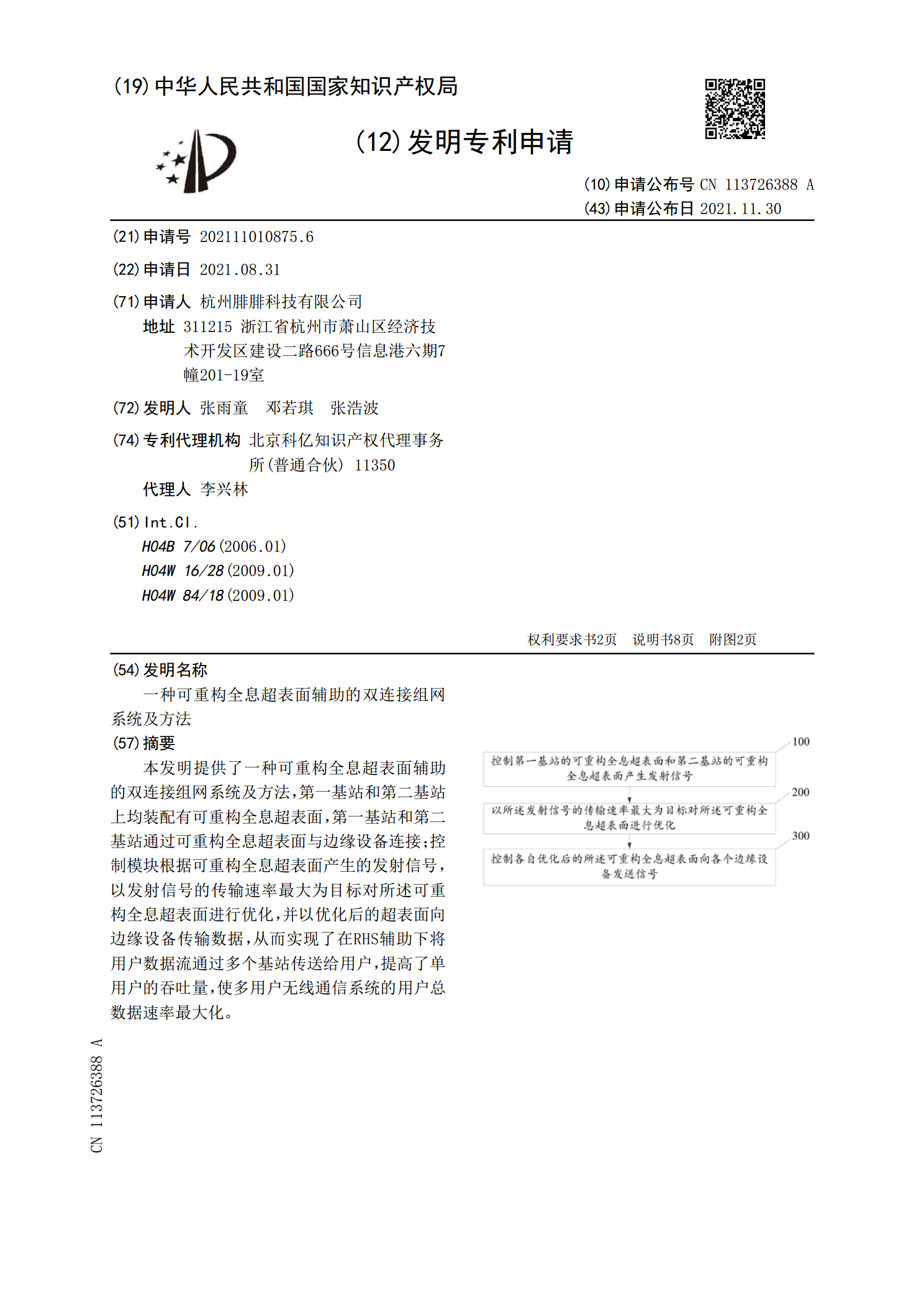
本发明提供了一种可重构全息超表面辅助的双连接组网系统及方法,第一基站和第二基站上均装配有可重构全息超表面,第一基站和第二基站通过可重构全息超表面与边缘设备连接;控制模块根据可重构全息超表面产生的发射信号,以发射信号的传输速率最大为目标对所述可重构全息超表面进行优化,并以优化后的超表面向边缘设备传输数据,从而实现了在RHS辅助下将用户数据流通过多个基站传送给用户,提高了单用户的吞吐量,使多用户无线通信系统的用户总数据速率最大化。

泥石流模拟实验PPT课件.ppt
泥石流模拟实验1、降水量少:在土质山谷模型的坡面洒水现象:________________________是山区由于暴雨、冰雪融水激发含有大量泥沙、石块的特殊洪流。1、降水量少:在土质山谷模型的坡面洒水现象:________________________请你分析表层有大量松散的土和石块请你分析活动二:探究人类活动影响泥石流的形成活动二:探究人类活动影响泥石流的形成时间:2010年8月7日22点左右泥石流给该地区带来了哪些危害?逃生指南灾后重建1、治水工程市民的心声小结A2、山上发生了泥石流,而此时你恰好