
激光钻孔装置及方法.pdf

飞舟****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光钻孔装置及方法.pdf
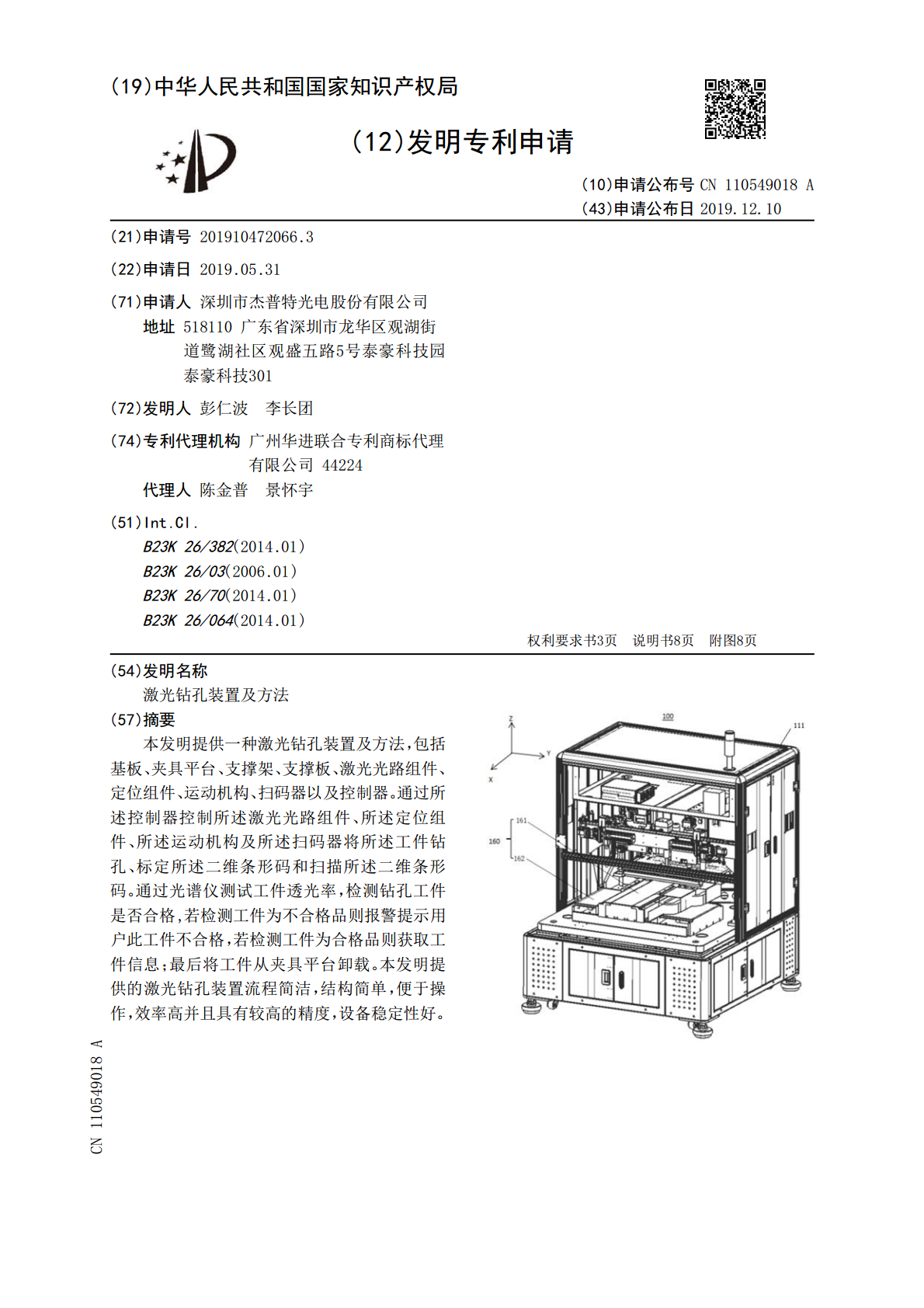
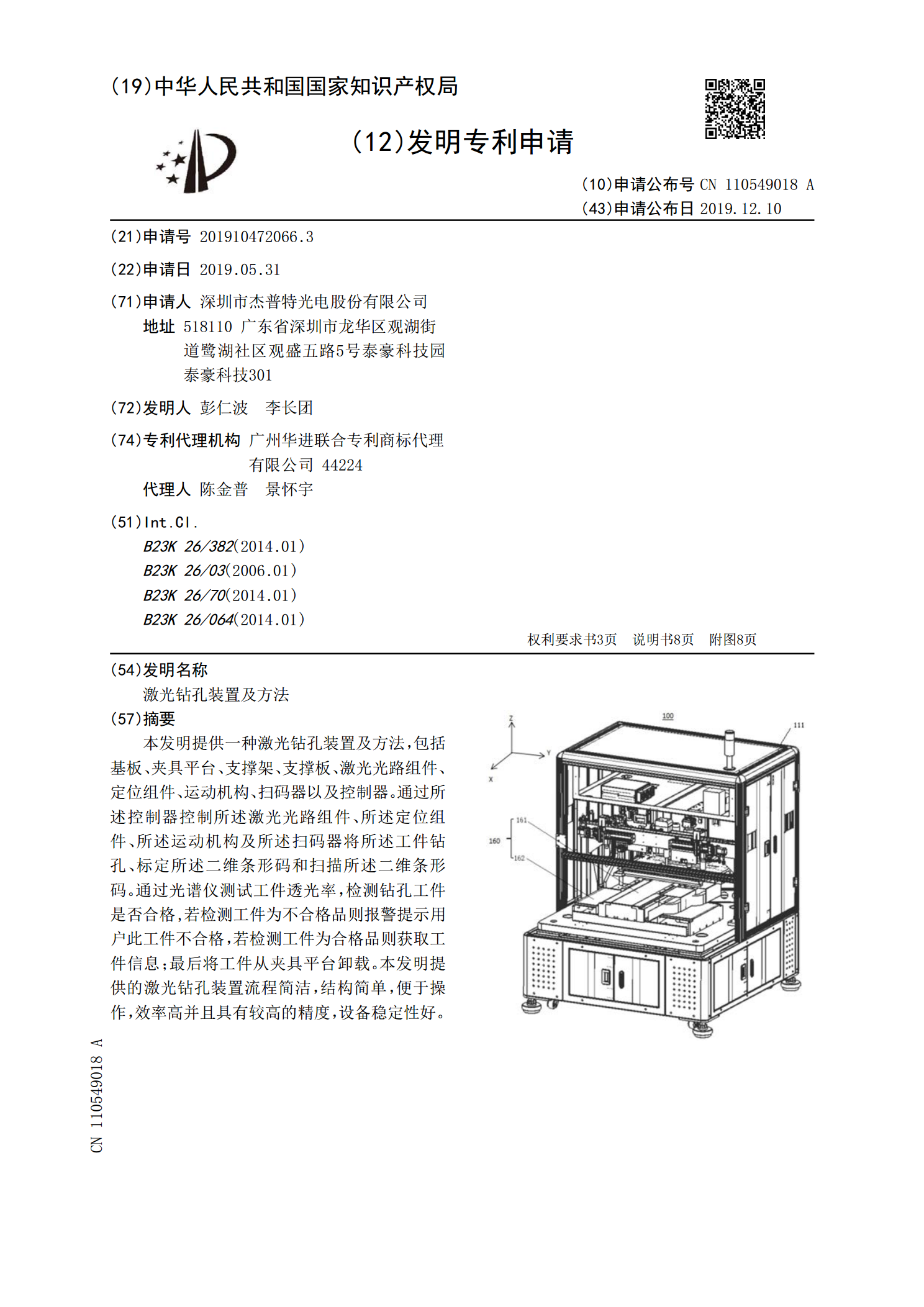
本发明提供一种激光钻孔装置及方法,包括基板、夹具平台、支撑架、支撑板、激光光路组件、定位组件、运动机构、扫码器以及控制器。通过所述控制器控制所述激光光路组件、所述定位组件、所述运动机构及所述扫码器将所述工件钻孔、标定所述二维条形码和扫描所述二维条形码。通过光谱仪测试工件透光率,检测钻孔工件是否合格,若检测工件为不合格品则报警提示用户此工件不合格,若检测工件为合格品则获取工件信息;最后将工件从夹具平台卸载。本发明提供的激光钻孔装置流程简洁,结构简单,便于操作,效率高并且具有较高的精度,设备稳定性好。
多头FPC紫外激光钻孔装置及方法.pdf
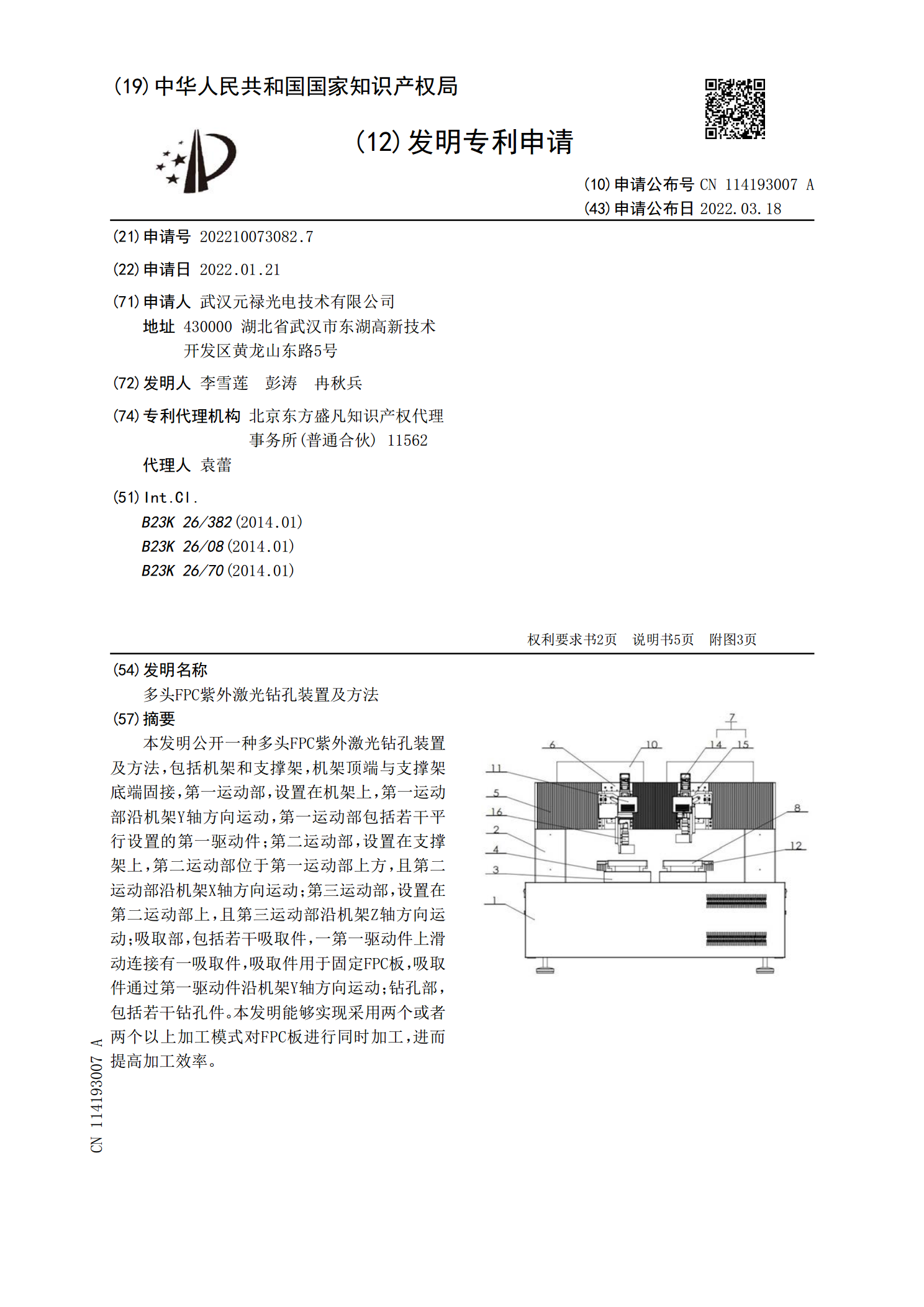
本发明公开一种多头FPC紫外激光钻孔装置及方法,包括机架和支撑架,机架顶端与支撑架底端固接,第一运动部,设置在机架上,第一运动部沿机架Y轴方向运动,第一运动部包括若干平行设置的第一驱动件;第二运动部,设置在支撑架上,第二运动部位于第一运动部上方,且第二运动部沿机架X轴方向运动;第三运动部,设置在第二运动部上,且第三运动部沿机架Z轴方向运动;吸取部,包括若干吸取件,一第一驱动件上滑动连接有一吸取件,吸取件用于固定FPC板,吸取件通过第一驱动件沿机架Y轴方向运动;钻孔部,包括若干钻孔件。本发明能够实现采用两个
一种UTG激光钻孔装置及其钻孔方法.pdf
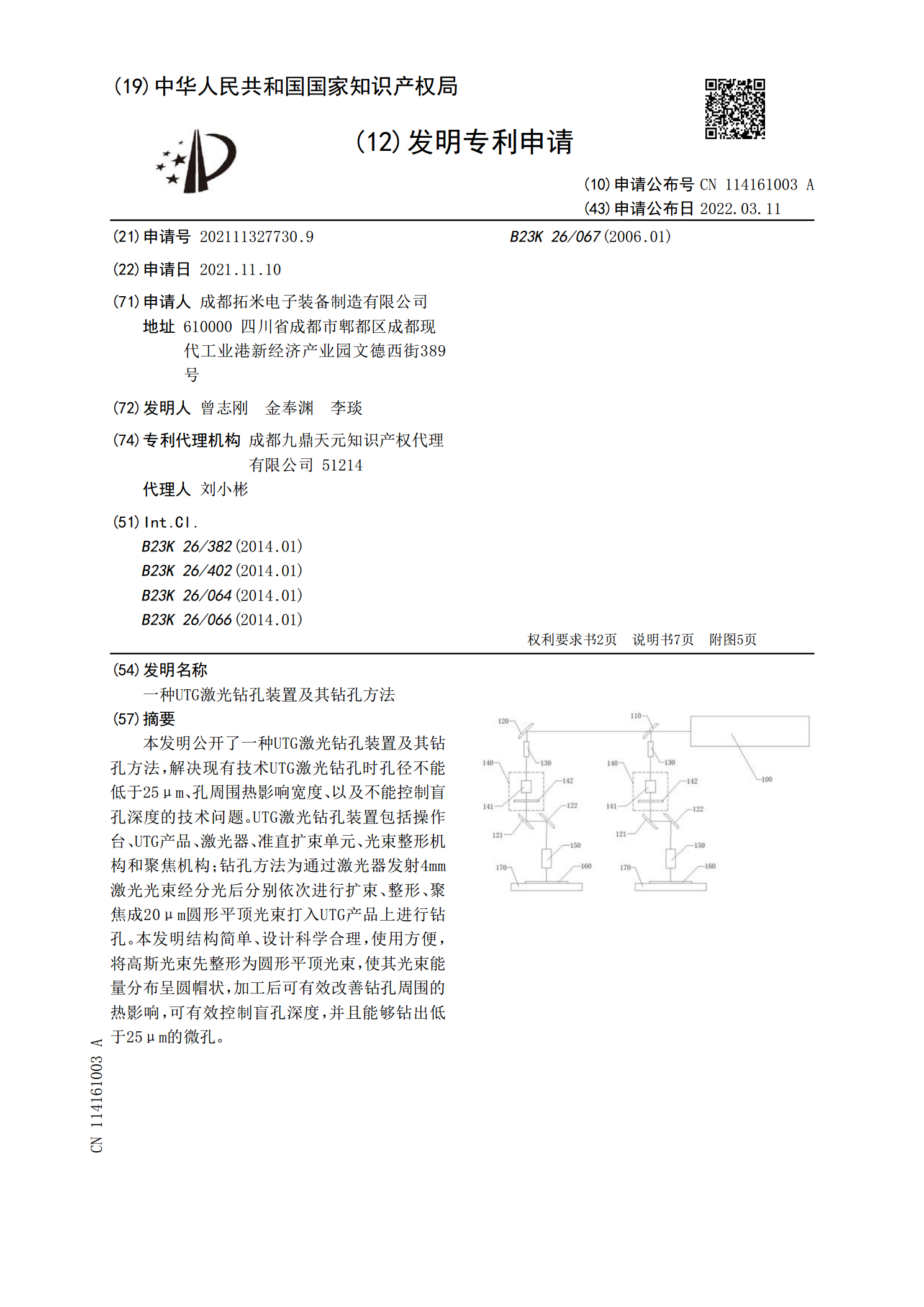
本发明公开了一种UTG激光钻孔装置及其钻孔方法,解决现有技术UTG激光钻孔时孔径不能低于25μm、孔周围热影响宽度、以及不能控制盲孔深度的技术问题。UTG激光钻孔装置包括操作台、UTG产品、激光器、准直扩束单元、光束整形机构和聚焦机构;钻孔方法为通过激光器发射4mm激光光束经分光后分别依次进行扩束、整形、聚焦成20μm圆形平顶光束打入UTG产品上进行钻孔。本发明结构简单、设计科学合理,使用方便,将高斯光束先整形为圆形平顶光束,使其光束能量分布呈圆帽状,加工后可有效改善钻孔周围的热影响,可有效控制盲孔深度,
PCB短波长脉冲激光钻孔方法及相关钻孔装置.pdf
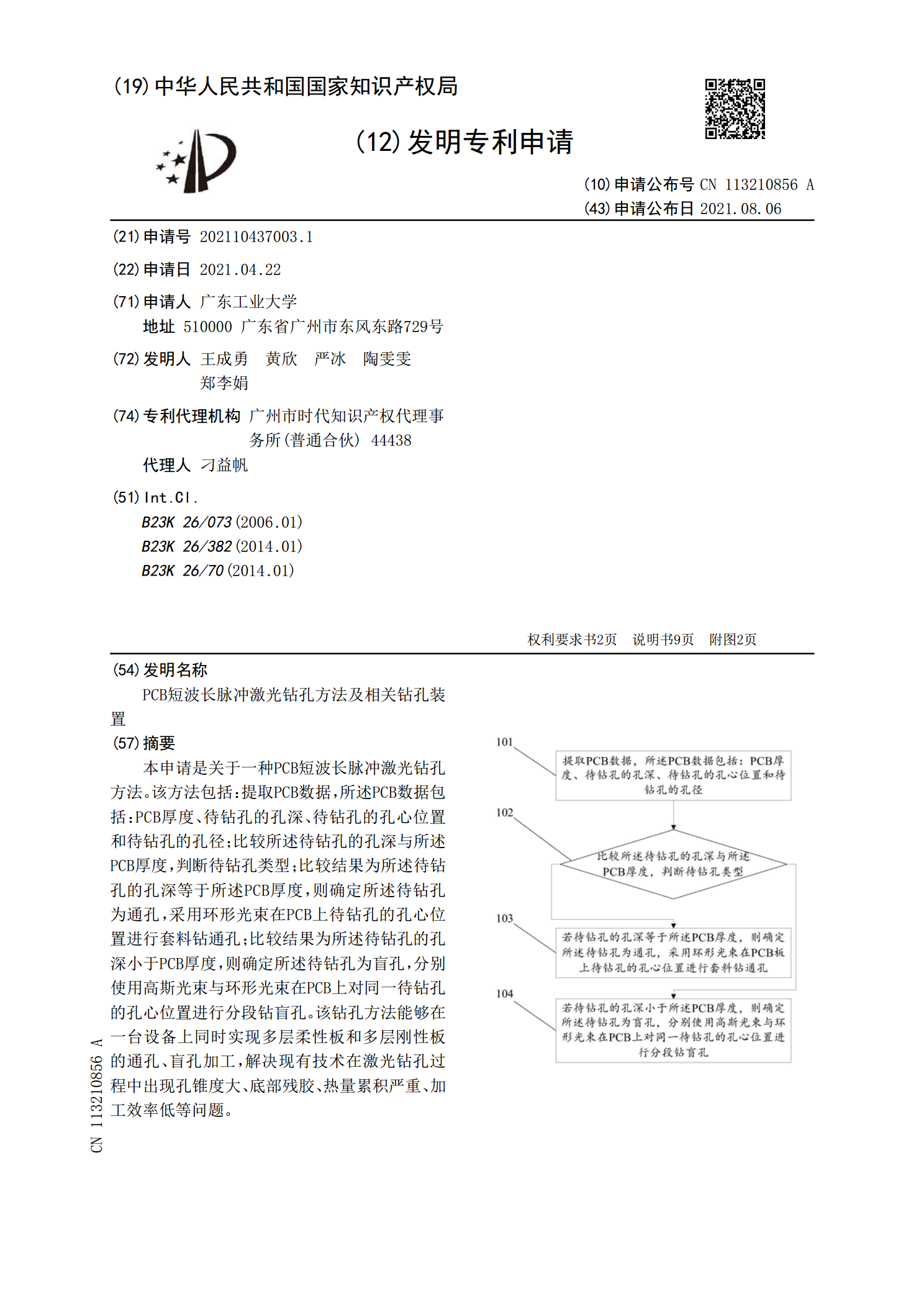
本申请是关于一种PCB短波长脉冲激光钻孔方法。该方法包括:提取PCB数据,所述PCB数据包括:PCB厚度、待钻孔的孔深、待钻孔的孔心位置和待钻孔的孔径;比较所述待钻孔的孔深与所述PCB厚度,判断待钻孔类型;比较结果为所述待钻孔的孔深等于所述PCB厚度,则确定所述待钻孔为通孔,采用环形光束在PCB上待钻孔的孔心位置进行套料钻通孔;比较结果为所述待钻孔的孔深小于PCB厚度,则确定所述待钻孔为盲孔,分别使用高斯光束与环形光束在PCB上对同一待钻孔的孔心位置进行分段钻盲孔。该钻孔方法能够在一台设备上同时实现多层柔

一种生瓷材料激光加工钻孔装置及钻孔方法.pdf
本发明公开了一种生瓷材料激光加工钻孔装置及钻孔方法,钻孔装置包括用于提供激光光源的激光器,用于对激光器的激光光束进行扩束准直的扩束镜,用于将激光光束反射并调节光路方向的反射镜组,以及用于接收反射镜组反射的激光光束并聚焦于生瓷材料上的扫描振镜和聚焦场镜,在扫描振镜上同轴设有用于进行钻孔位置定位的视觉定位机构,以及用于吸取粉尘的同轴抽尘机构;本发明通过激光进行钻孔加工,无需定制模具及冲针,增加了钻孔效率,提高了成孔边缘质量,无需更换任何配件能够适用不同孔径的加工需求,同时递进加工的方式,能够实现大厚度生瓷材料