
一种树苗移栽用机器人.pdf

是你****盟主

1/9

2/9
3/9
4/9

5/9

6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种树苗移栽用机器人.pdf
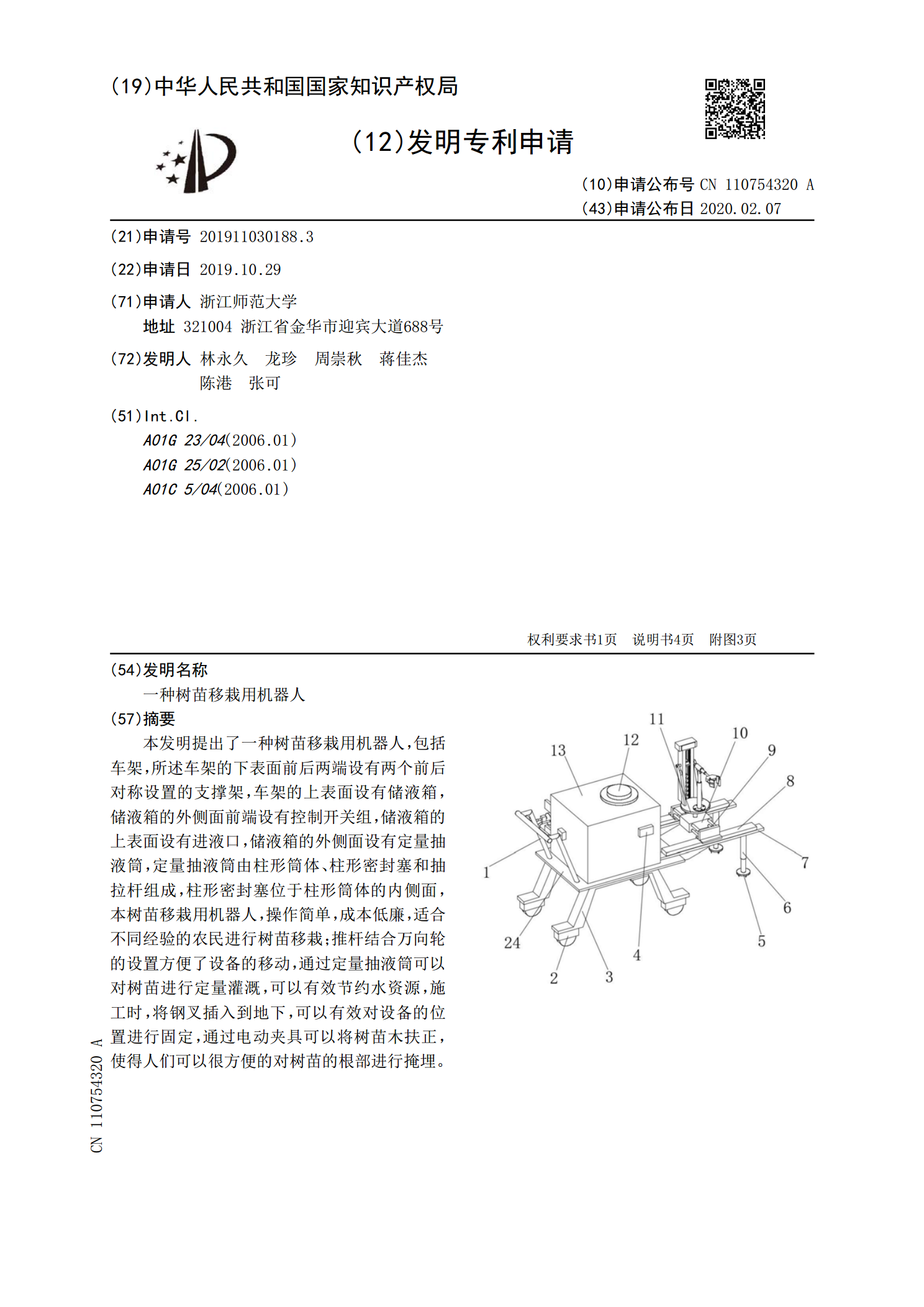
本发明提出了一种树苗移栽用机器人,包括车架,所述车架的下表面前后两端设有两个前后对称设置的支撑架,车架的上表面设有储液箱,储液箱的外侧面前端设有控制开关组,储液箱的上表面设有进液口,储液箱的外侧面设有定量抽液筒,定量抽液筒由柱形筒体、柱形密封塞和抽拉杆组成,柱形密封塞位于柱形筒体的内侧面,本树苗移栽用机器人,操作简单,成本低廉,适合不同经验的农民进行树苗移栽;推杆结合万向轮的设置方便了设备的移动,通过定量抽液筒可以对树苗进行定量灌溉,可以有效节约水资源,施工时,将钢叉插入到地下,可以有效对设备的位置进行固
一种林业种植用树苗移栽装置.pdf
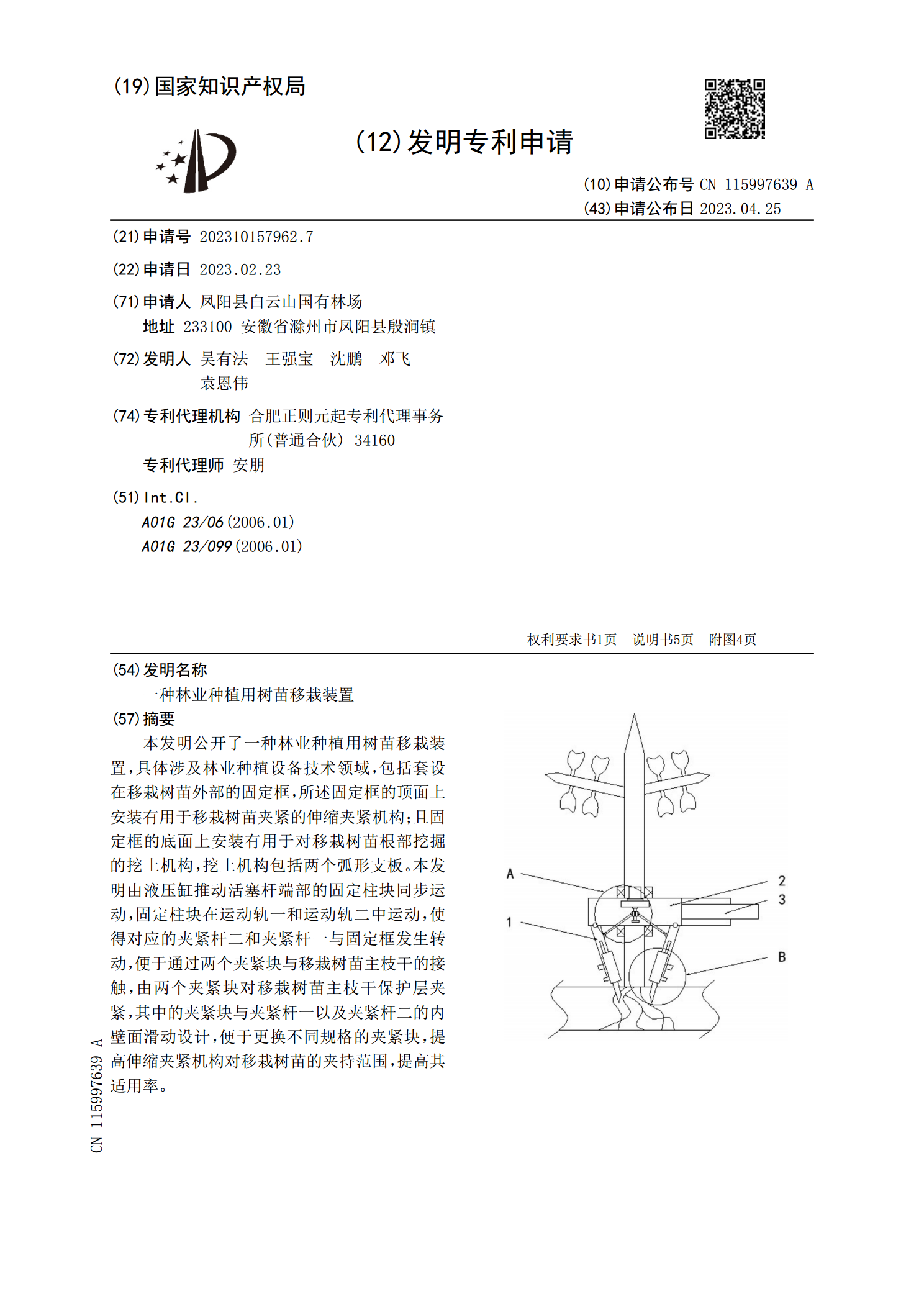
本发明公开了一种林业种植用树苗移栽装置,具体涉及林业种植设备技术领域,包括套设在移栽树苗外部的固定框,所述固定框的顶面上安装有用于移栽树苗夹紧的伸缩夹紧机构;且固定框的底面上安装有用于对移栽树苗根部挖掘的挖土机构,挖土机构包括两个弧形支板。本发明由液压缸推动活塞杆端部的固定柱块同步运动,固定柱块在运动轨一和运动轨二中运动,使得对应的夹紧杆二和夹紧杆一与固定框发生转动,便于通过两个夹紧块与移栽树苗主枝干的接触,由两个夹紧块对移栽树苗主枝干保护层夹紧,其中的夹紧块与夹紧杆一以及夹紧杆二的内壁面滑动设计,便于更

一种杨梅树苗移栽用保存方法.pdf
本发明涉及果树种植领域,具体涉及一种杨梅树苗移栽用保存方法,包括如下步骤:A.将树苗放置在保存装置内;B.使用保存装置对树苗浇灌营养液;C.调节保存装置对树苗浇灌的营养液的量;该保存装置包括存苗箱,存苗箱设有内壳和外壳,内壳上开有第一通孔,内壳和外壳之间为存液腔;存苗腔内横向设置有若干第一输液管道,第一输液管道向存苗箱底部弯曲且与第一通孔连通,第一输液管道上设置有若干出液孔,出液孔的直径从输液管道的高端至低端逐渐增大;存液腔内设置有挡板,挡板上开有第二通孔,挡板顶端设置有挂钩;存苗箱上方设置有固定架,固定

一种林业工程用树苗移栽存储设备.pdf
本发明涉及林业栽种技术领域,且公开了一种林业工程用树苗移栽存储设备,所述树苗移栽存储设备包括收集箱和收集箱上的挖抓,所述收集箱上转动连接有旋转轮,所述旋转轮的外表面套设有同步带,所述同步带上安装有连接杆,所述连接杆上安装有圆套,所述圆套内转动连接有用于储存树苗的收集桶,所述收集箱上连接有伸缩杆,所述伸缩杆上安装有连接板,所述连接板滑动连接在收集箱上,所述连接板上安装有喷头。本发明利用喷头进行喷洒液体至树苗上,让树苗身上保持一定的水分,随后通过支撑板推动喷头上下摆动,进而让喷头可以上下喷洒液体,从而让树苗身
一种农业种植用树苗移栽防护装置.pdf
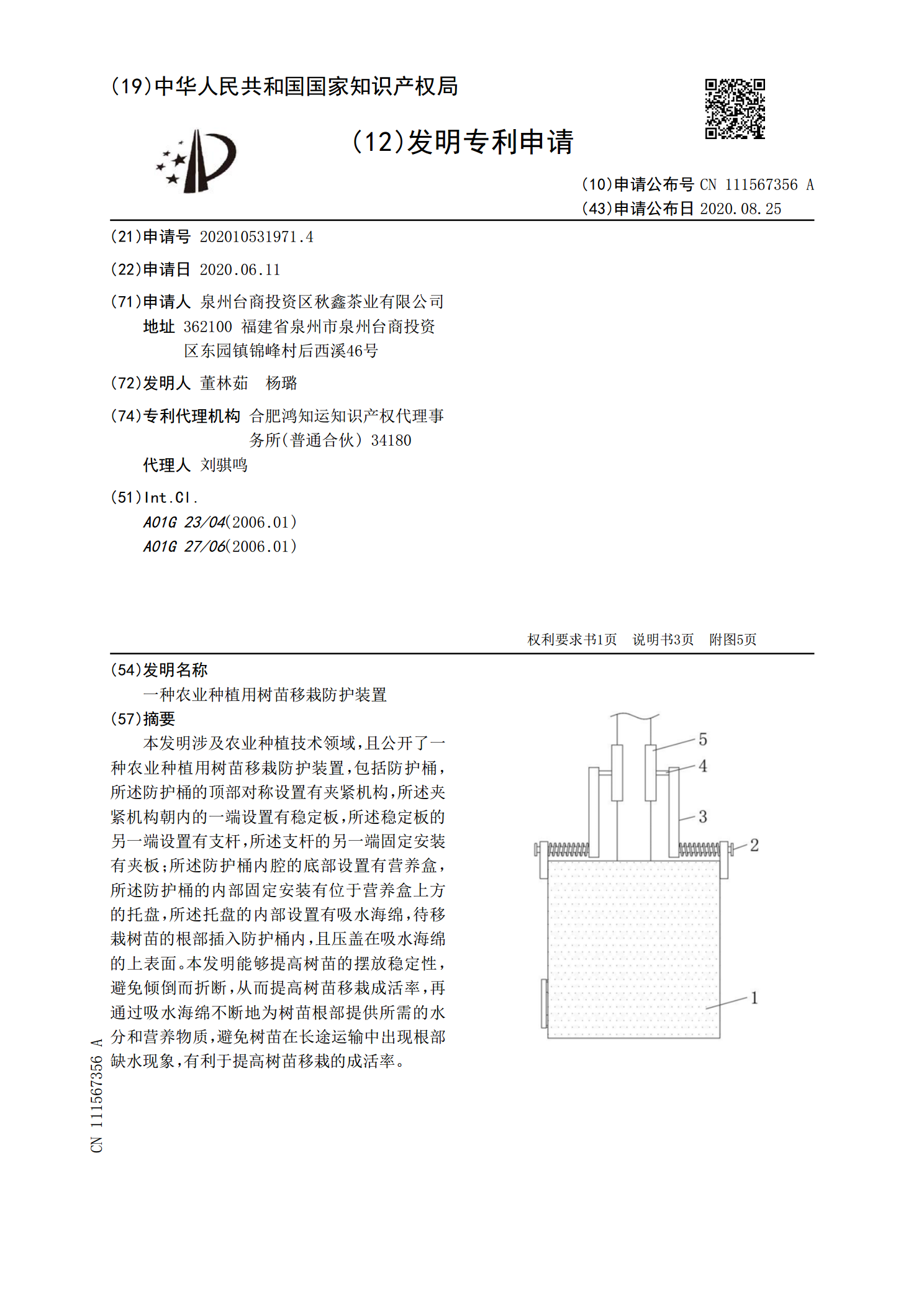
本发明涉及农业种植技术领域,且公开了一种农业种植用树苗移栽防护装置,包括防护桶,所述防护桶的顶部对称设置有夹紧机构,所述夹紧机构朝内的一端设置有稳定板,所述稳定板的另一端设置有支杆,所述支杆的另一端固定安装有夹板;所述防护桶内腔的底部设置有营养盒,所述防护桶的内部固定安装有位于营养盒上方的托盘,所述托盘的内部设置有吸水海绵,待移栽树苗的根部插入防护桶内,且压盖在吸水海绵的上表面。本发明能够提高树苗的摆放稳定性,避免倾倒而折断,从而提高树苗移栽成活率,再通过吸水海绵不断地为树苗根部提供所需的水分和营养物质,