
基于超声临界折射纵波检测风机叶片应力的装置及方法.pdf

书生****文章


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于超声临界折射纵波检测风机叶片应力的装置及方法.pdf
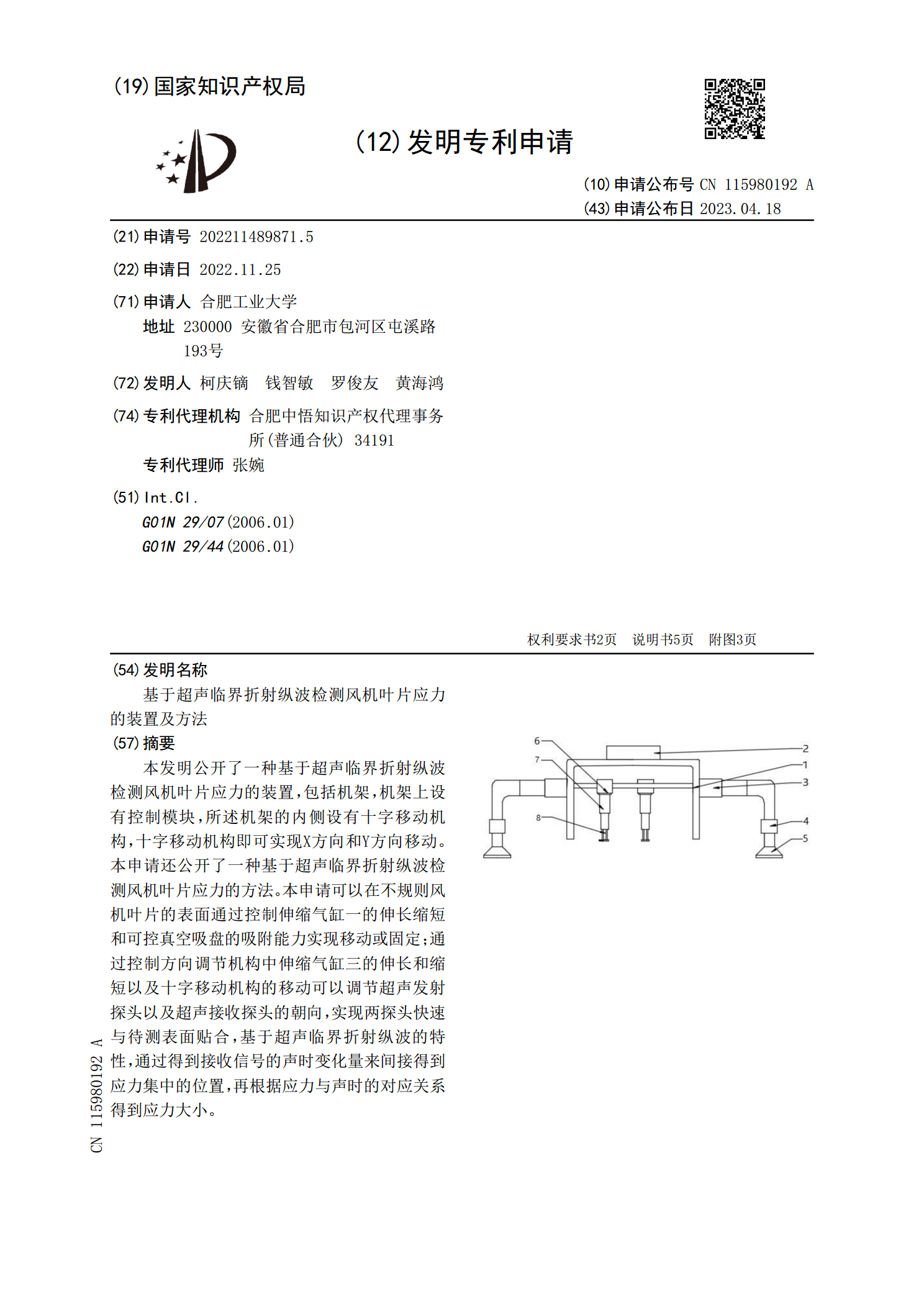
本发明公开了一种基于超声临界折射纵波检测风机叶片应力的装置,包括机架,机架上设有控制模块,所述机架的内侧设有十字移动机构,十字移动机构即可实现X方向和Y方向移动。本申请还公开了一种基于超声临界折射纵波检测风机叶片应力的方法。本申请可以在不规则风机叶片的表面通过控制伸缩气缸一的伸长缩短和可控真空吸盘的吸附能力实现移动或固定;通过控制方向调节机构中伸缩气缸三的伸长和缩短以及十字移动机构的移动可以调节超声发射探头以及超声接收探头的朝向,实现两探头快速与待测表面贴合,基于超声临界折射纵波的特性,通过得到接收信号的

基于临界折射纵波声弹效应的平面应力测量理论和方法.docx
基于临界折射纵波声弹效应的平面应力测量理论和方法摘要本文基于临界折射纵波声弹效应,提出了一种基于声弹理论的平面应力测量方法。首先,介绍了平面应力的定义和重要性。然后,简要介绍了声弹理论的基本知识,包括临界折射纵波声弹效应的概念和原理。接着,本文详细阐述了基于声弹理论的平面应力测量方法,包括样品制备、声波传播、实验测量和数据处理等步骤。最后,通过实验验证了该方法的有效性和可行性,为平面应力的测量提供了一种新的思路和方法。关键词:平面应力;声弹理论;临界折射纵波;声弹效应;测量方法一、引言平面应力是材料力学研

临界折射纵波(LCR)应力测试修正方法与机理研究.docx
临界折射纵波(LCR)应力测试修正方法与机理研究临界折射纵波(LCR)应力测试修正方法与机理研究摘要:在工程和材料领域中,对材料的力学性能进行准确评估至关重要。临界折射纵波(LCR)方法是一种常用的非破坏性测试技术,用于测量材料中的应力。然而,由于样品尺寸、形状和界面效应等因素的影响,该方法存在一定的误差。因此,本文主要研究临界折射纵波(LCR)应力测试修正方法与机理,以提高测试精度和准确性,为工程实践提供准确的力学性能评估。引言:正确评估材料的应力状态对工程设计和性能评估至关重要。传统的应力测量方法需要

残余应力的超声横纵波检测方法.docx
残余应力的超声横纵波检测方法一、引言在工业生产和制造过程中,材料的表面和内部都会产生应力。残余应力是指在材料内部存在并保留下来的应力状态,是材料制造、加工等过程中的自然产物,也是需期望得以充分利用、因为它能提高材料的强度和刚度,提高工件的耐用性,从而提高零部件的寿命等。但这种应力如果得不到有效检测和控制,则对材料的质量稳定性和安全性会带来一定的风险,因此需利用可靠的检测手段对其进行检测和控制。近年来,超声波技术得到了工业界的广泛应用,可以对材料的物理性质和缺陷进行非破坏性检测和评价。超声波技术中的传输方式

基于临界折射纵波法Q345C焊接接头残余应力检测.docx
基于临界折射纵波法Q345C焊接接头残余应力检测标题:基于临界折射纵波法Q345C焊接接头残余应力检测摘要:焊接接头是工程结构中常见的连接方式,但其制造过程中往往会产生残余应力,可能导致接头的失效。因此,残余应力的检测是保证接头质量的重要环节。本论文研究了一种新型焊接接头残余应力检测方法——基于临界折射纵波法。以Q345C钢为材料,在焊接接头处进行临界折射纵波的传播和反射检测,得到了残余应力的定性和定量分析结果。实验结果表明,该方法能够较准确地检测出焊接接头的残余应力,并为制定相应的焊接工艺提供了可靠的依