
一种基于中心像素梯度融合和全局代价聚合的深度立体匹配算法.pdf

一吃****福乾

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于中心像素梯度融合和全局代价聚合的深度立体匹配算法.pdf
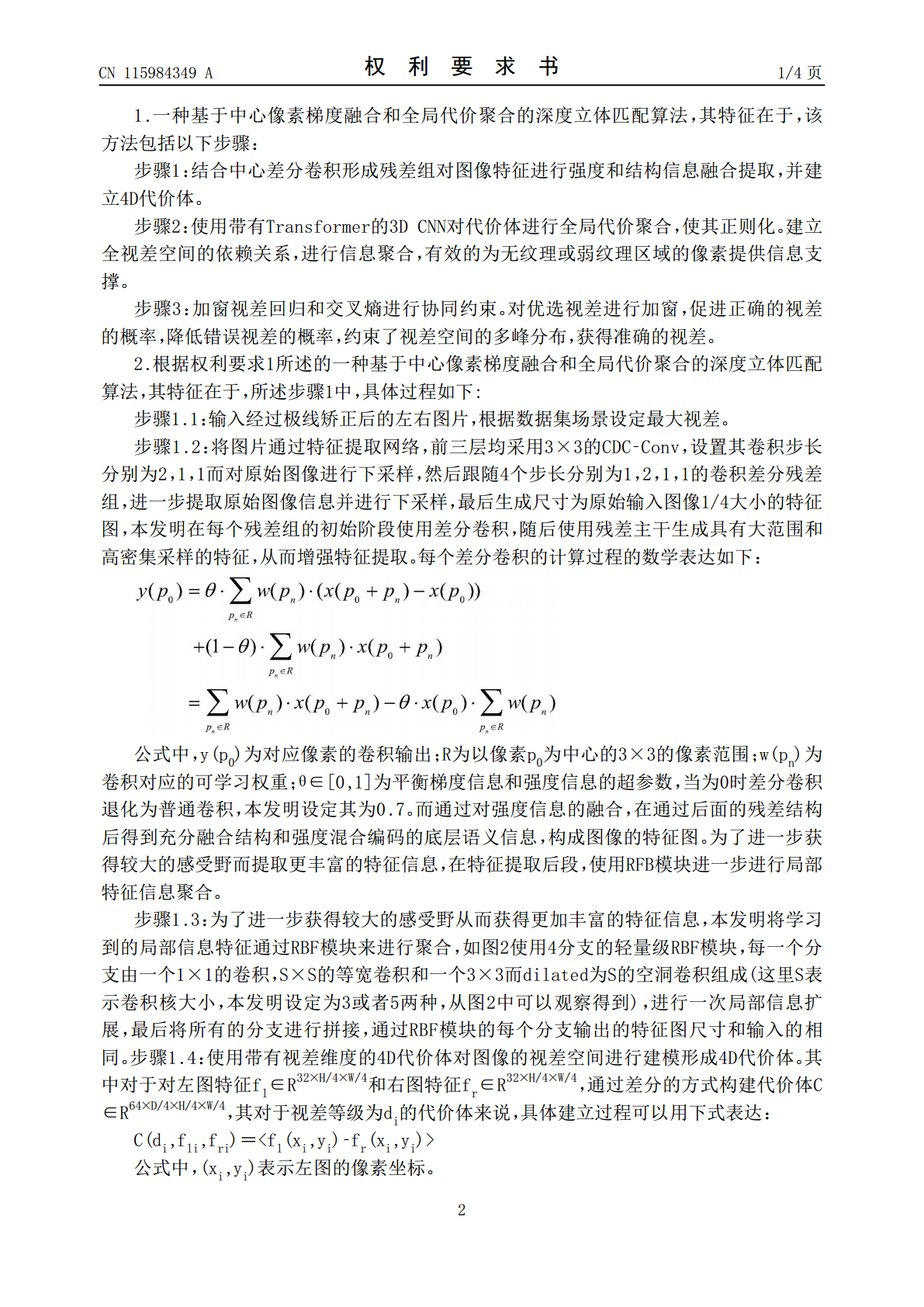
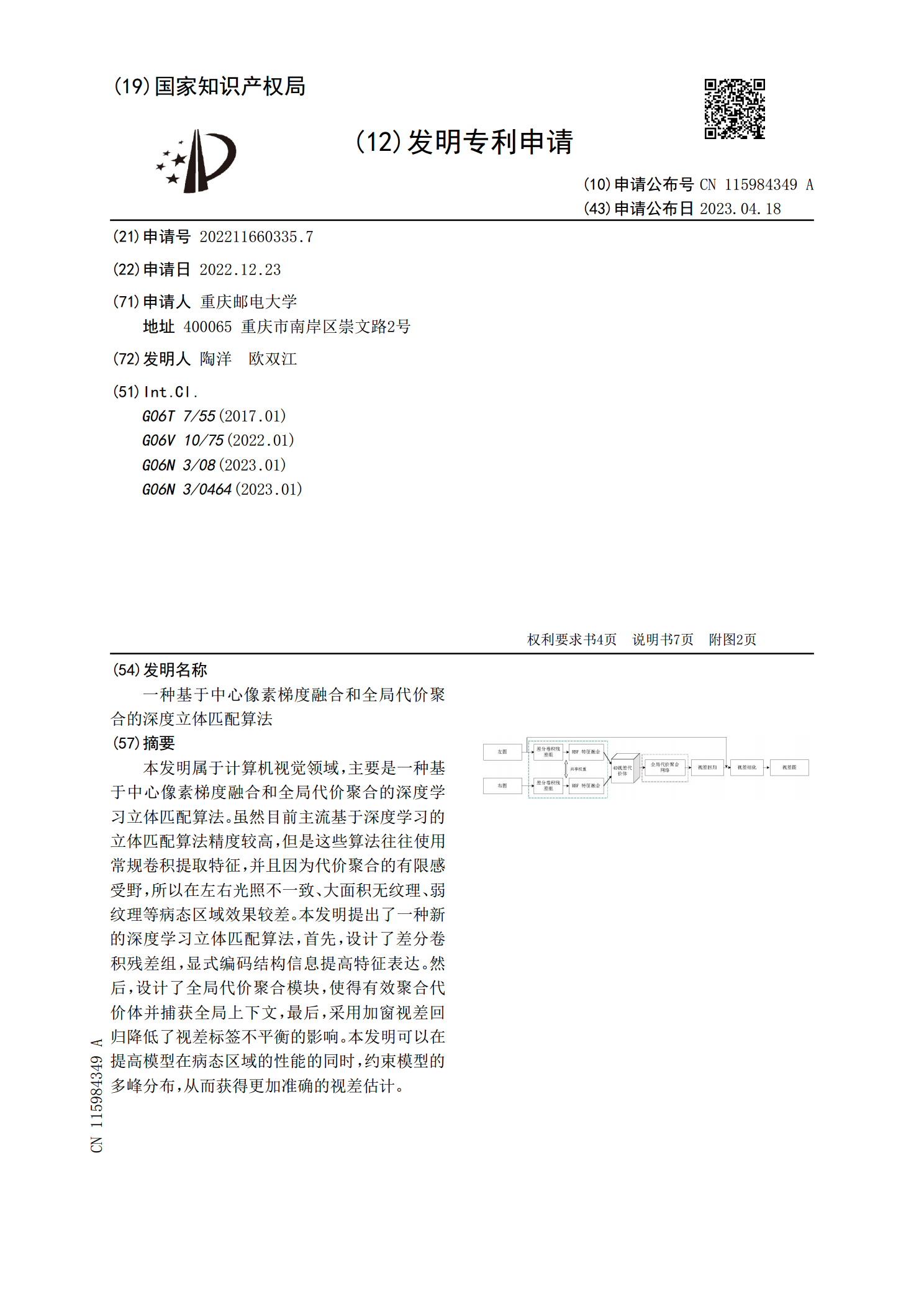
本发明属于计算机视觉领域,主要是一种基于中心像素梯度融合和全局代价聚合的深度学习立体匹配算法。虽然目前主流基于深度学习的立体匹配算法精度较高,但是这些算法往往使用常规卷积提取特征,并且因为代价聚合的有限感受野,所以在左右光照不一致、大面积无纹理、弱纹理等病态区域效果较差。本发明提出了一种新的深度学习立体匹配算法,首先,设计了差分卷积残差组,显式编码结构信息提高特征表达。然后,设计了全局代价聚合模块,使得有效聚合代价体并捕获全局上下文,最后,采用加窗视差回归降低了视差标签不平衡的影响。本发明可以在提高模型在

基于多特征融合与树形结构代价聚合的立体匹配算法.docx
基于多特征融合与树形结构代价聚合的立体匹配算法基于多特征融合与树形结构代价聚合的立体匹配算法摘要:立体匹配是计算机视觉领域的重要研究方向之一。传统的立体匹配算法往往只利用了图像的某些特征进行匹配,且对于结构复杂的场景往往效果不佳。为了提高立体匹配算法的精度和鲁棒性,本文提出了一种基于多特征融合与树形结构代价聚合的立体匹配算法。关键词:立体匹配;多特征融合;树形结构;代价聚合引言:立体匹配是计算机视觉领域的核心问题之一,其目的是通过计算两幅图像的对应关系来实现立体深度的获取。传统的立体匹配算法主要利用了图像
基于双目立体匹配算法的代价聚合方法和系统.pdf
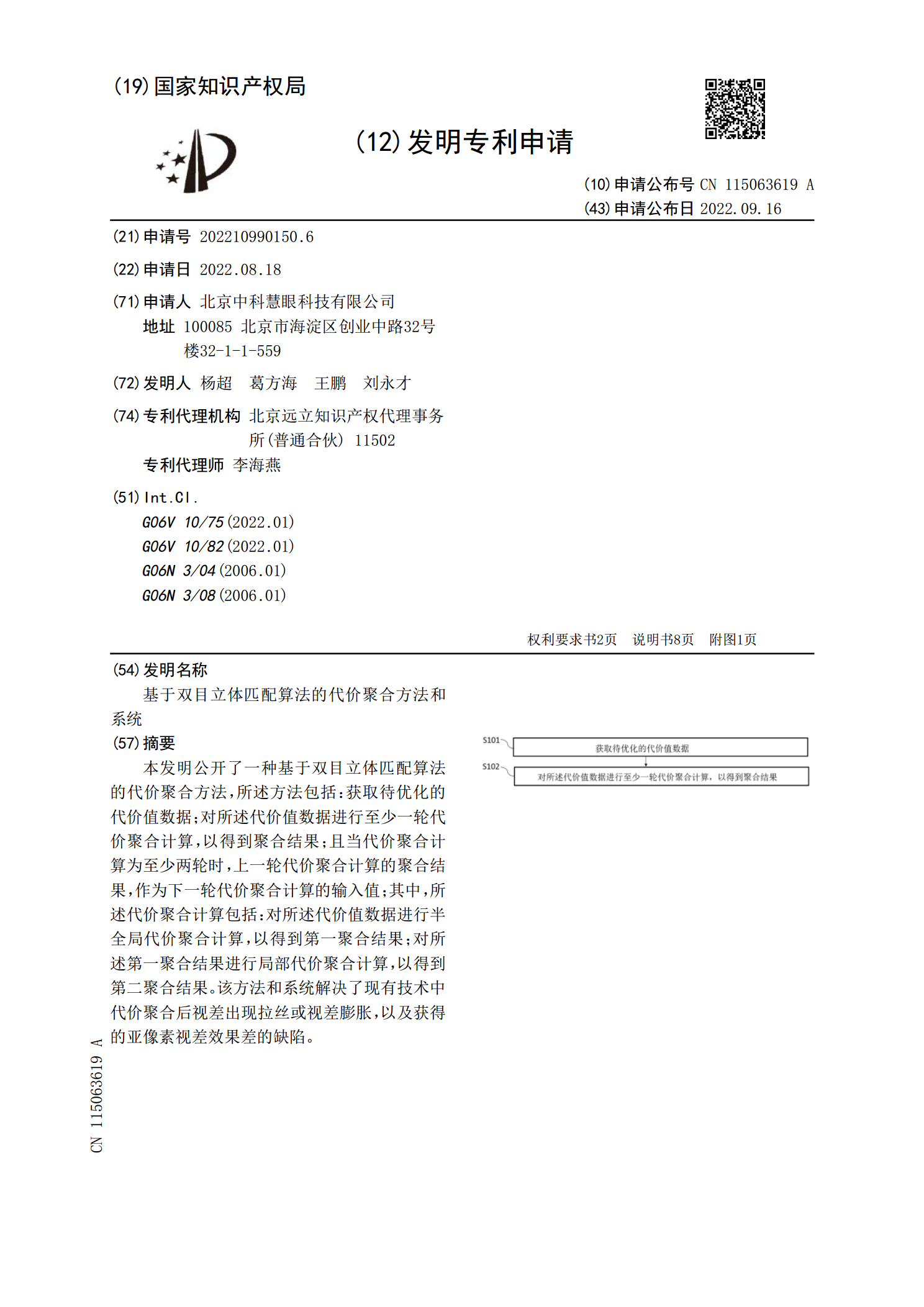
本发明公开了一种基于双目立体匹配算法的代价聚合方法,所述方法包括:获取待优化的代价值数据;对所述代价值数据进行至少一轮代价聚合计算,以得到聚合结果;且当代价聚合计算为至少两轮时,上一轮代价聚合计算的聚合结果,作为下一轮代价聚合计算的输入值;其中,所述代价聚合计算包括:对所述代价值数据进行半全局代价聚合计算,以得到第一聚合结果;对所述第一聚合结果进行局部代价聚合计算,以得到第二聚合结果。该方法和系统解决了现有技术中代价聚合后视差出现拉丝或视差膨胀,以及获得的亚像素视差效果差的缺陷。

基于水平树结构的可变权重代价聚合立体匹配算法.docx
基于水平树结构的可变权重代价聚合立体匹配算法基于水平树结构的可变权重代价聚合立体匹配算法摘要:立体匹配是计算机视觉领域的关键问题之一,其目标是找到两幅图像之间的对应关系。在基于水平树结构的可变权重代价聚合算法中,我们提出了一种新的立体匹配方法。该方法通过建立水平树结构来优化匹配过程,并使用可变权重的代价聚合策略来准确而高效地获取图像的对应关系。实验结果表明,该算法在准确性和计算效率方面具有显著的优势。1.引言立体匹配是三维重建、深度估计和目标跟踪等计算机视觉任务中的一个基础问题。传统的立体匹配方法通常基于

一种基于梯度增强的立体匹配算法.docx
一种基于梯度增强的立体匹配算法Title:AGradientBoosting-basedStereoMatchingAlgorithmAbstract:Stereomatchingisafundamentaltaskincomputervision,aimingtoestablishcorrespondencesbetweencorrespondingpointsinapairofstereoimages.Accuratestereomatchingiscrucialforapplicationssuch