
一种基于随机游走的光电-雷达传感器网数据收集方法.pdf

飞飙****ng


1/9
2/9

3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于随机游走的光电-雷达传感器网数据收集方法.pdf
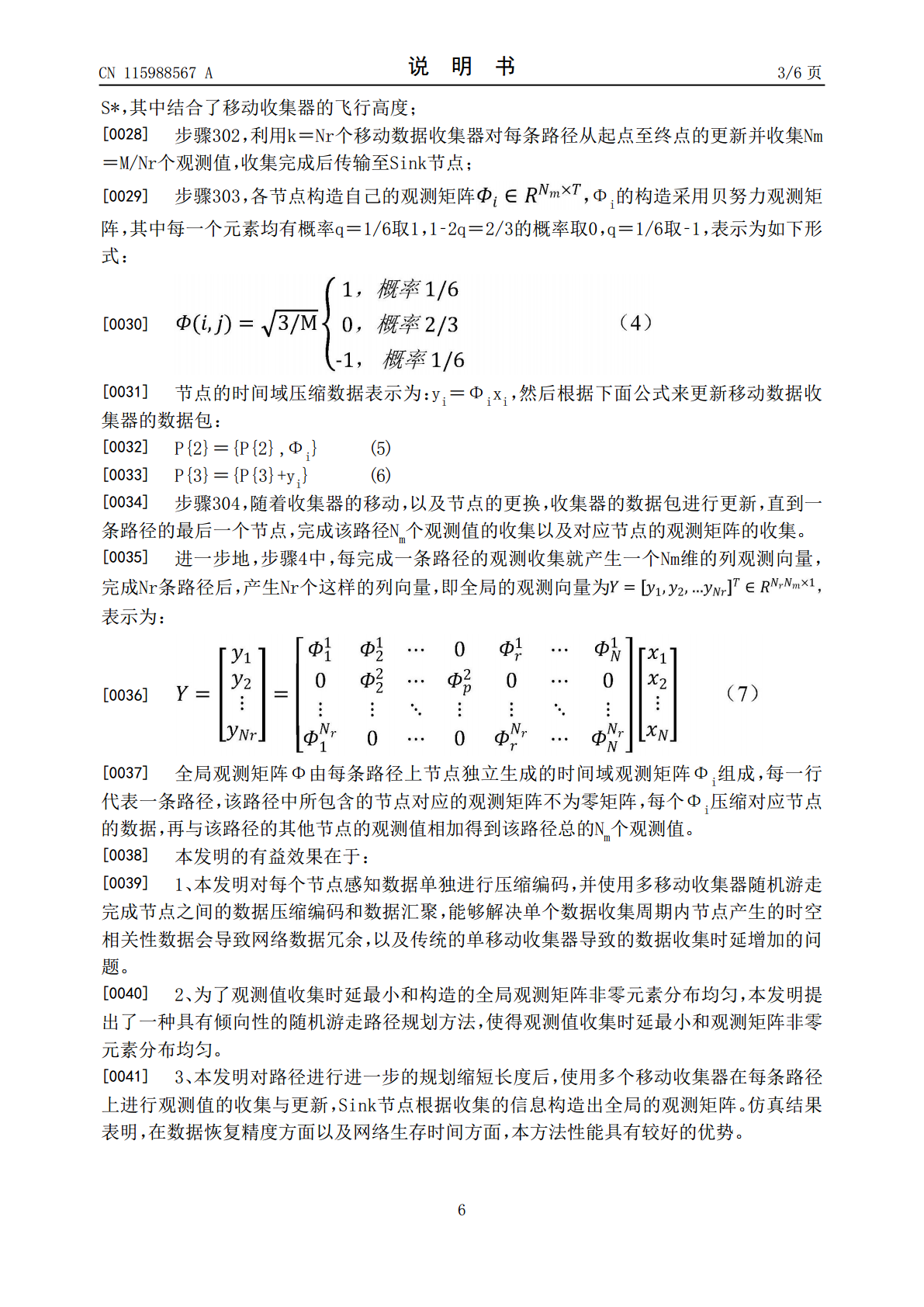
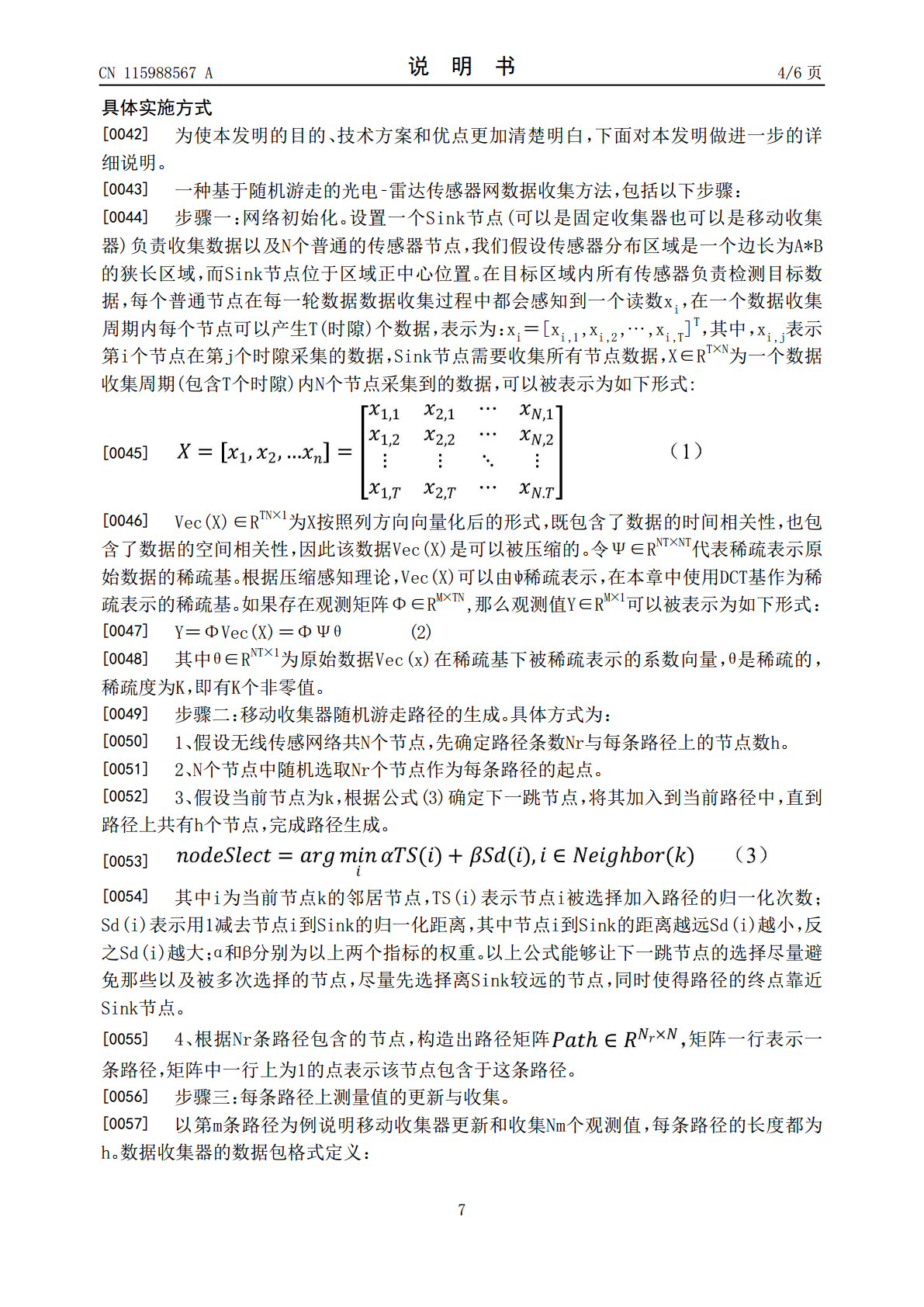
本发明公开了一种基于随机游走的光电‑雷达传感器网数据收集方法,属于网络优化领域。本发明包括:设置一个负责收集数据的Sink节点,以及N个普通的传感器节点;生成移动收集器随机游走路径;对每条路径上的测量值进行更新与收集;收集器将收集到的观测值以及时域观测矩阵传输至Sink节点,Sink节点根据这些信息构造出全局的观测矩阵,恢复原始数据。本发明对每个节点感知数据单独进行压缩编码,并使用多移动收集器随机游走完成了节点之间的数据压缩编码和数据汇聚。
无线传感网中基于随机游走的数据收集方法.pdf
本发明公开一种无线传感网中基于随机游走的数据收集方法,主要解决现有传感网能耗过大,网络均衡性较差的问题,其实现方案是:在节点随机分布的网络中,通过节点感知获得位置信息和周围邻居信息,通过添加的开启游走机制对网络节点分类,根据类别挑选游走开始的节点;根据游走分类节点开启随机游走收集数据,并通过均衡机制确定下一跳节点;将节点每轮收集的数据进行压缩整合,通过已确定游走的下一跳节点发送到基站;在基站将整合后的数据恢复成与原始信号接近的低误差信号。本发明减少了网络中数据的收发量和节点通信次数,在均衡网络的同时缩短了
一种基于最佳投影点的光电-雷达传感器网数据收集方法.pdf
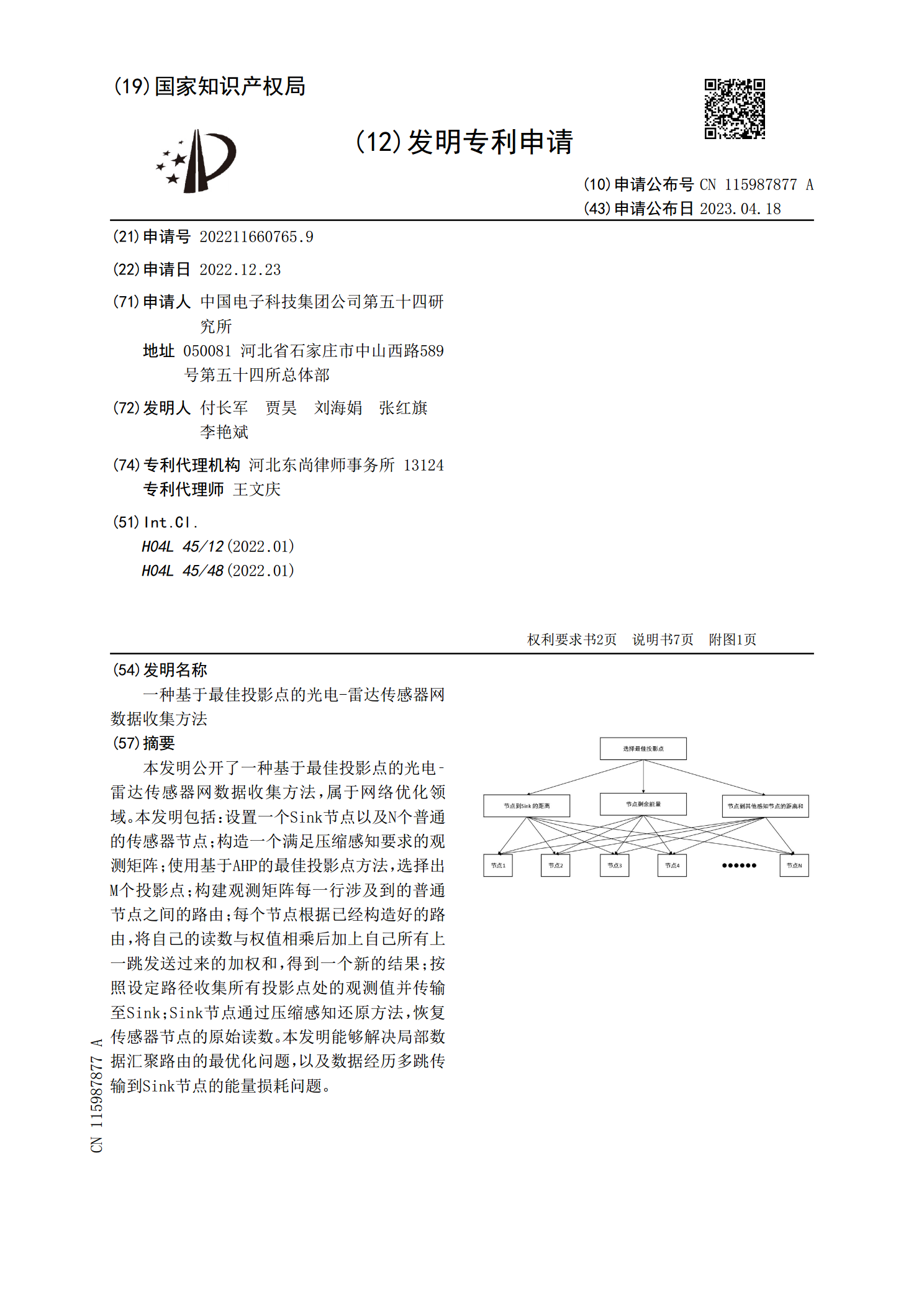
本发明公开了一种基于最佳投影点的光电‑雷达传感器网数据收集方法,属于网络优化领域。本发明包括:设置一个Sink节点以及N个普通的传感器节点;构造一个满足压缩感知要求的观测矩阵;使用基于AHP的最佳投影点方法,选择出M个投影点;构建观测矩阵每一行涉及到的普通节点之间的路由;每个节点根据已经构造好的路由,将自己的读数与权值相乘后加上自己所有上一跳发送过来的加权和,得到一个新的结果;按照设定路径收集所有投影点处的观测值并传输至Sink;Sink节点通过压缩感知还原方法,恢复传感器节点的原始读数。本发明能够解决局
一种基于均等分簇的光电-雷达传感器网数据收集方法.pdf
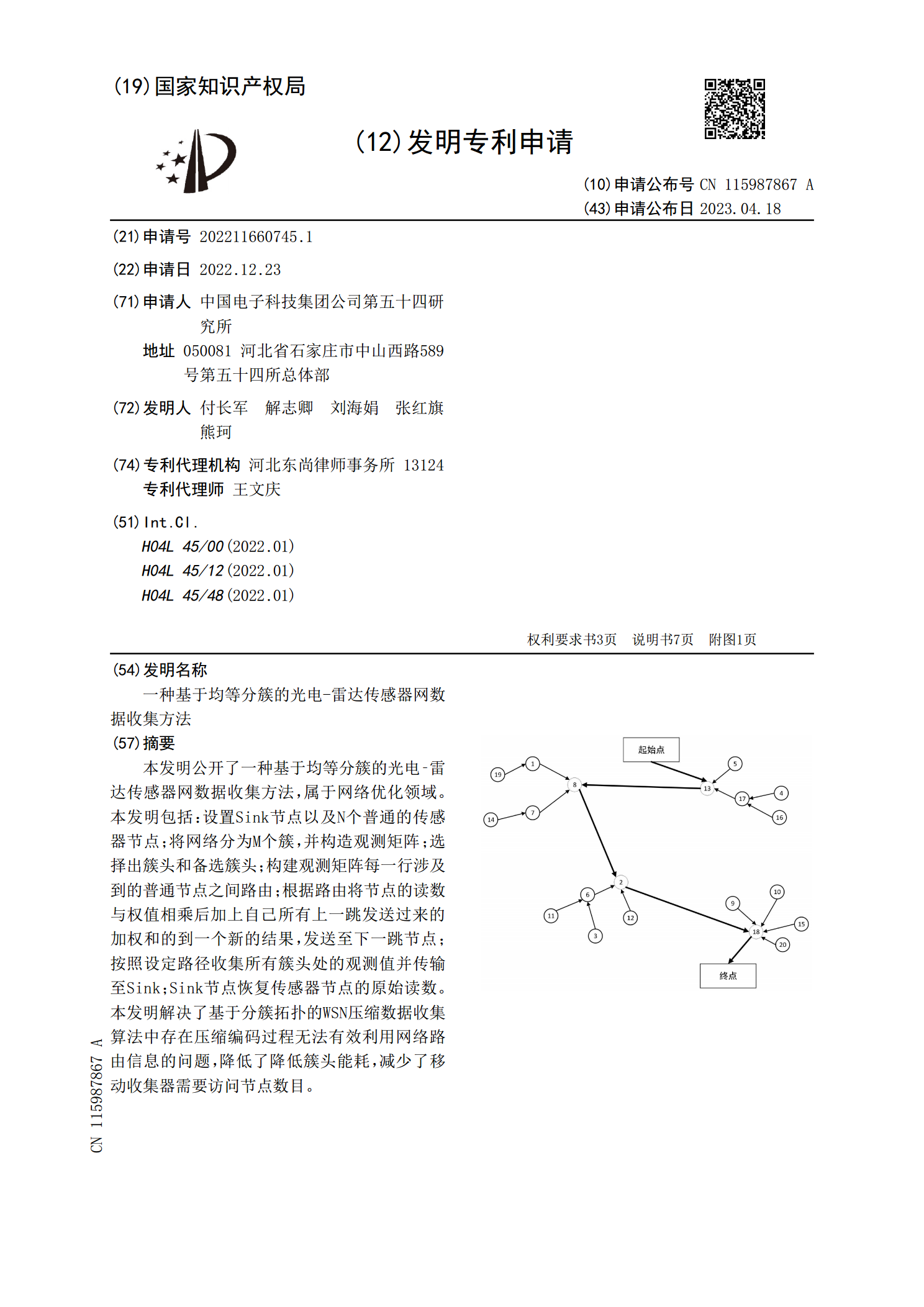
本发明公开了一种基于均等分簇的光电‑雷达传感器网数据收集方法,属于网络优化领域。本发明包括:设置Sink节点以及N个普通的传感器节点;将网络分为M个簇,并构造观测矩阵;选择出簇头和备选簇头;构建观测矩阵每一行涉及到的普通节点之间路由;根据路由将节点的读数与权值相乘后加上自己所有上一跳发送过来的加权和的到一个新的结果,发送至下一跳节点;按照设定路径收集所有簇头处的观测值并传输至Sink;Sink节点恢复传感器节点的原始读数。本发明解决了基于分簇拓扑的WSN压缩数据收集算法中存在压缩编码过程无法有效利用网络路

一种基于偏置随机游走的属性网络嵌入方法.docx
一种基于偏置随机游走的属性网络嵌入方法基于偏置随机游走的属性网络嵌入方法摘要:属性网络是一种常见的数据结构,在许多现实世界的领域中都有广泛的应用。属性网络中的节点具有属性信息,这些信息可以用于揭示节点之间的潜在关系。节点嵌入是一种将节点映射到低维向量空间的方法,能够捕捉节点的结构和属性信息。本文提出了一种基于偏置随机游走的属性网络嵌入方法,通过引入偏置项来提高节点嵌入的性能。实验结果表明,该方法能够比传统的随机游走方法更好地保留节点的属性信息。1.引言属性网络是一种既含有节点之间连接关系,又包含节点属性信