
一种水池清洁机器人.pdf

萌运****魔王

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种水池清洁机器人.pdf
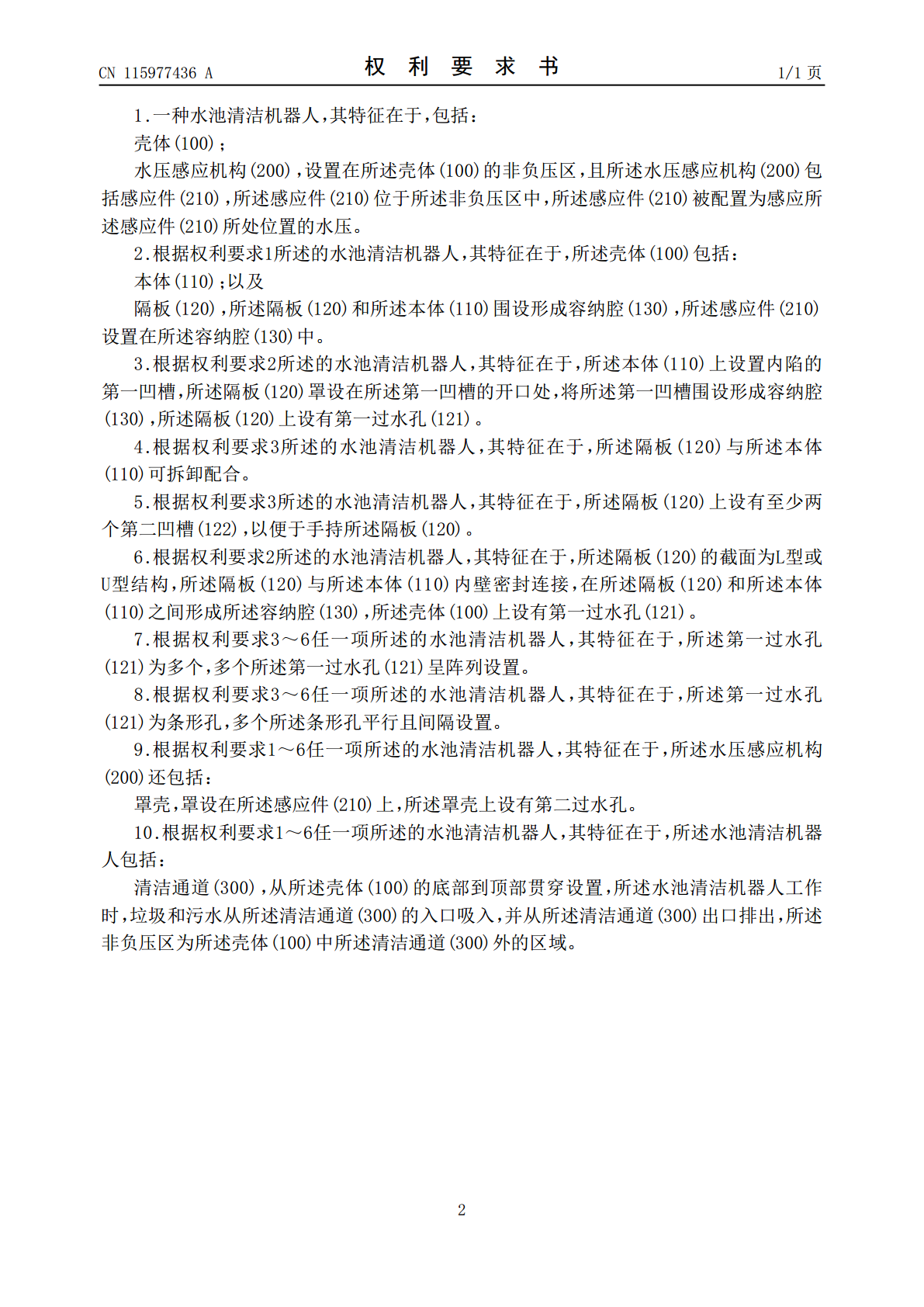
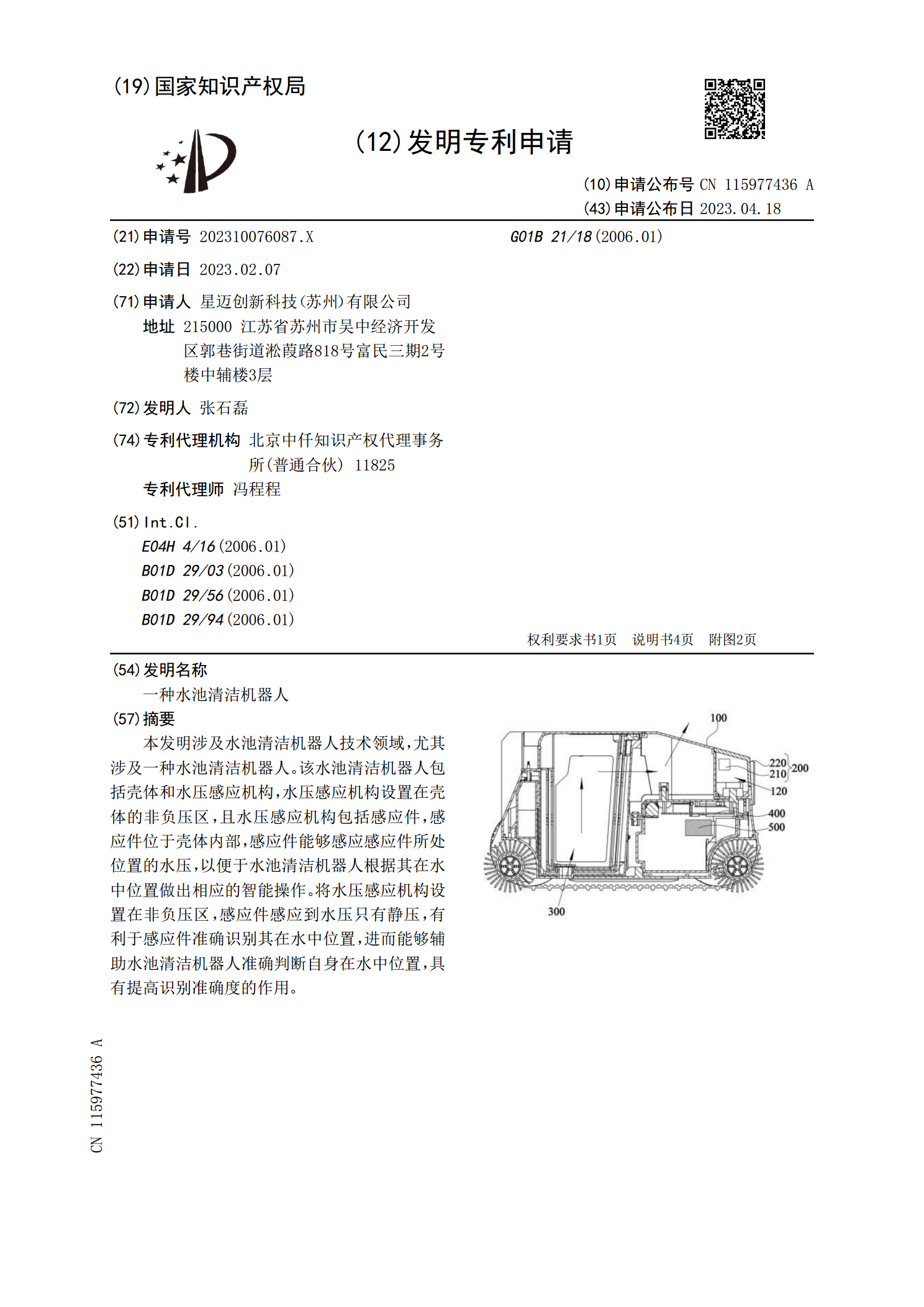
本发明涉及水池清洁机器人技术领域,尤其涉及一种水池清洁机器人。该水池清洁机器人包括壳体和水压感应机构,水压感应机构设置在壳体的非负压区,且水压感应机构包括感应件,感应件位于壳体内部,感应件能够感应感应件所处位置的水压,以便于水池清洁机器人根据其在水中位置做出相应的智能操作。将水压感应机构设置在非负压区,感应件感应到水压只有静压,有利于感应件准确识别其在水中位置,进而能够辅助水池清洁机器人准确判断自身在水中位置,具有提高识别准确度的作用。
一种水池清洁工具.pdf
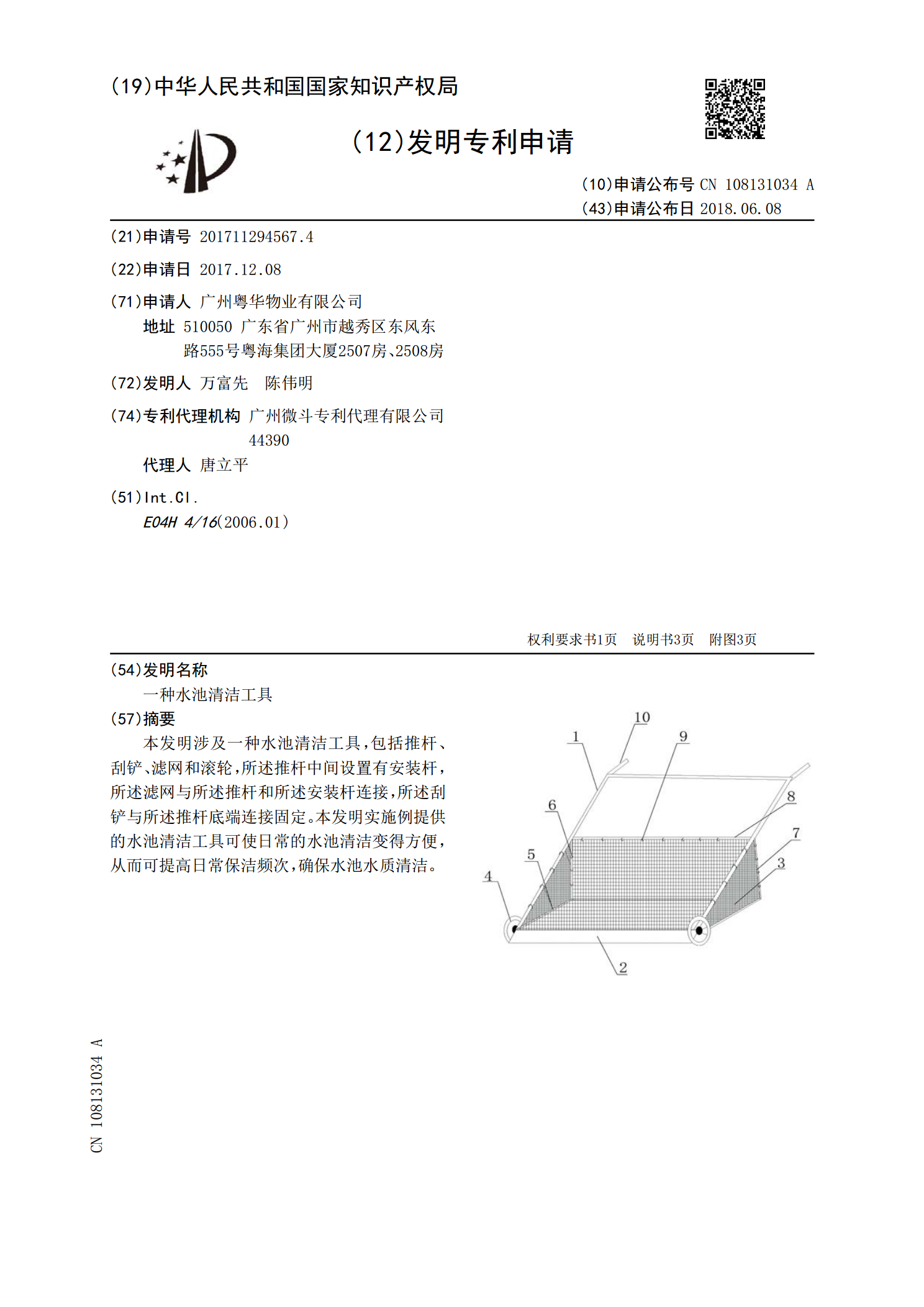
本发明涉及一种水池清洁工具,包括推杆、刮铲、滤网和滚轮,所述推杆中间设置有安装杆,所述滤网与所述推杆和所述安装杆连接,所述刮铲与所述推杆底端连接固定。本发明实施例提供的水池清洁工具可使日常的水池清洁变得方便,从而可提高日常保洁频次,确保水池水质清洁。
一种水池清洁方法.pdf
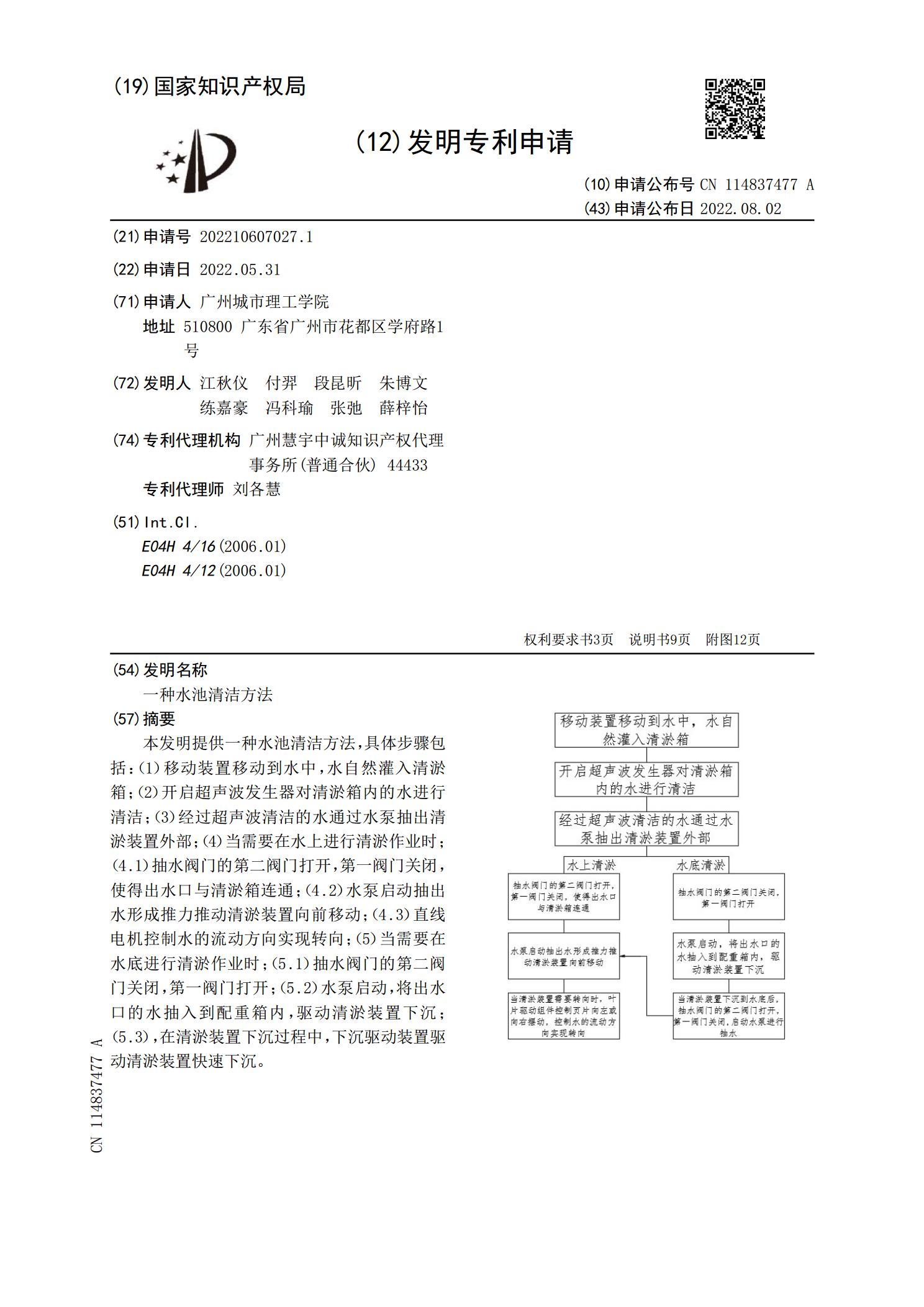
本发明提供一种水池清洁方法,具体步骤包括:(1)移动装置移动到水中,水自然灌入清淤箱;(2)开启超声波发生器对清淤箱内的水进行清洁;(3)经过超声波清洁的水通过水泵抽出清淤装置外部;(4)当需要在水上进行清淤作业时;(4.1)抽水阀门的第二阀门打开,第一阀门关闭,使得出水口与清淤箱连通;(4.2)水泵启动抽出水形成推力推动清淤装置向前移动;(4.3)直线电机控制水的流动方向实现转向;(5)当需要在水底进行清淤作业时;(5.1)抽水阀门的第二阀门关闭,第一阀门打开;(5.2)水泵启动,将出水口的水抽入到配重
一种水池清洁装置.pdf
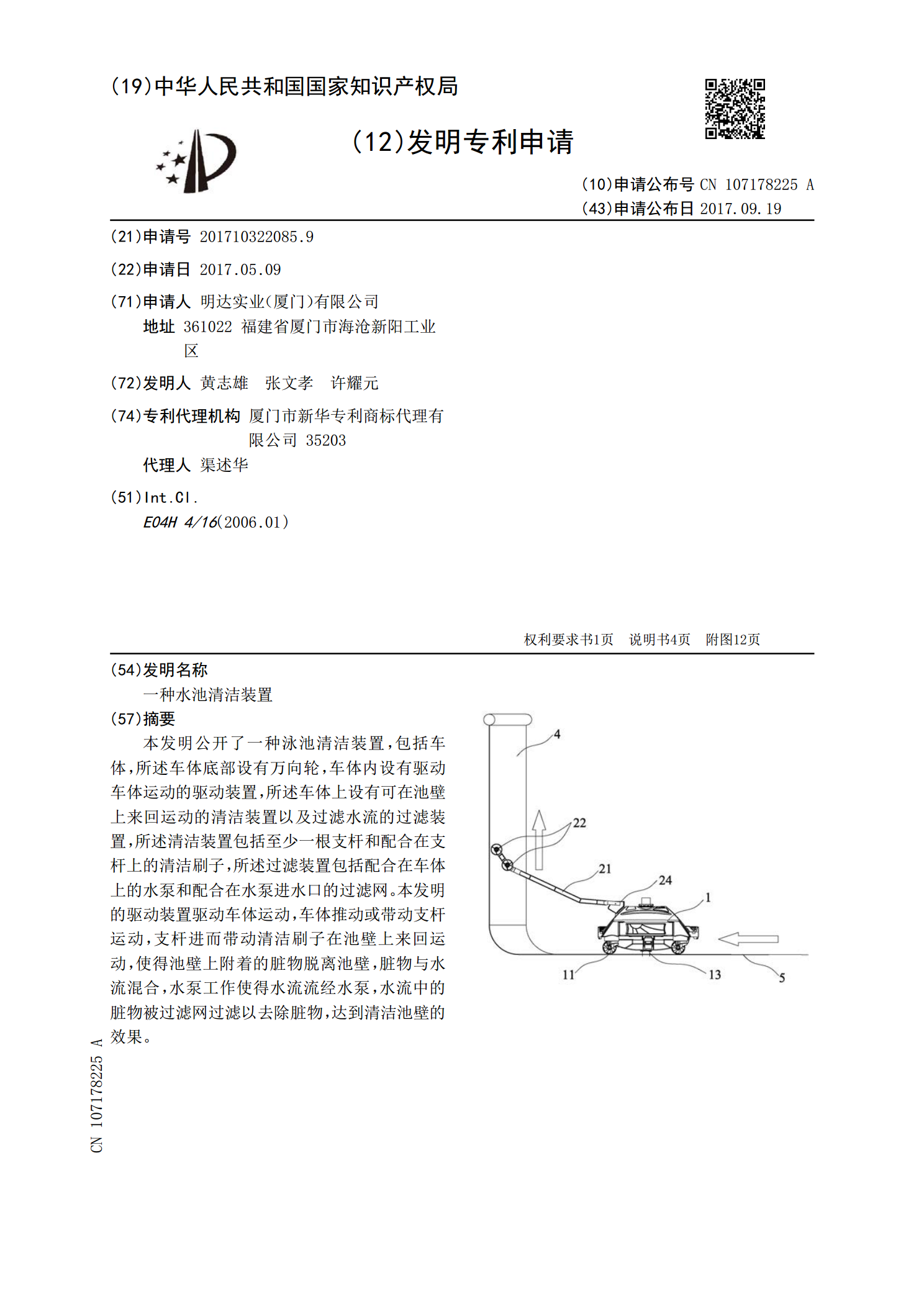
本发明公开了一种泳池清洁装置,包括车体,所述车体底部设有万向轮,车体内设有驱动车体运动的驱动装置,所述车体上设有可在池壁上来回运动的清洁装置以及过滤水流的过滤装置,所述清洁装置包括至少一根支杆和配合在支杆上的清洁刷子,所述过滤装置包括配合在车体上的水泵和配合在水泵进水口的过滤网。本发明的驱动装置驱动车体运动,车体推动或带动支杆运动,支杆进而带动清洁刷子在池壁上来回运动,使得池壁上附着的脏物脱离池壁,脏物与水流混合,水泵工作使得水流流经水泵,水流中的脏物被过滤网过滤以去除脏物,达到清洁池壁的效果。
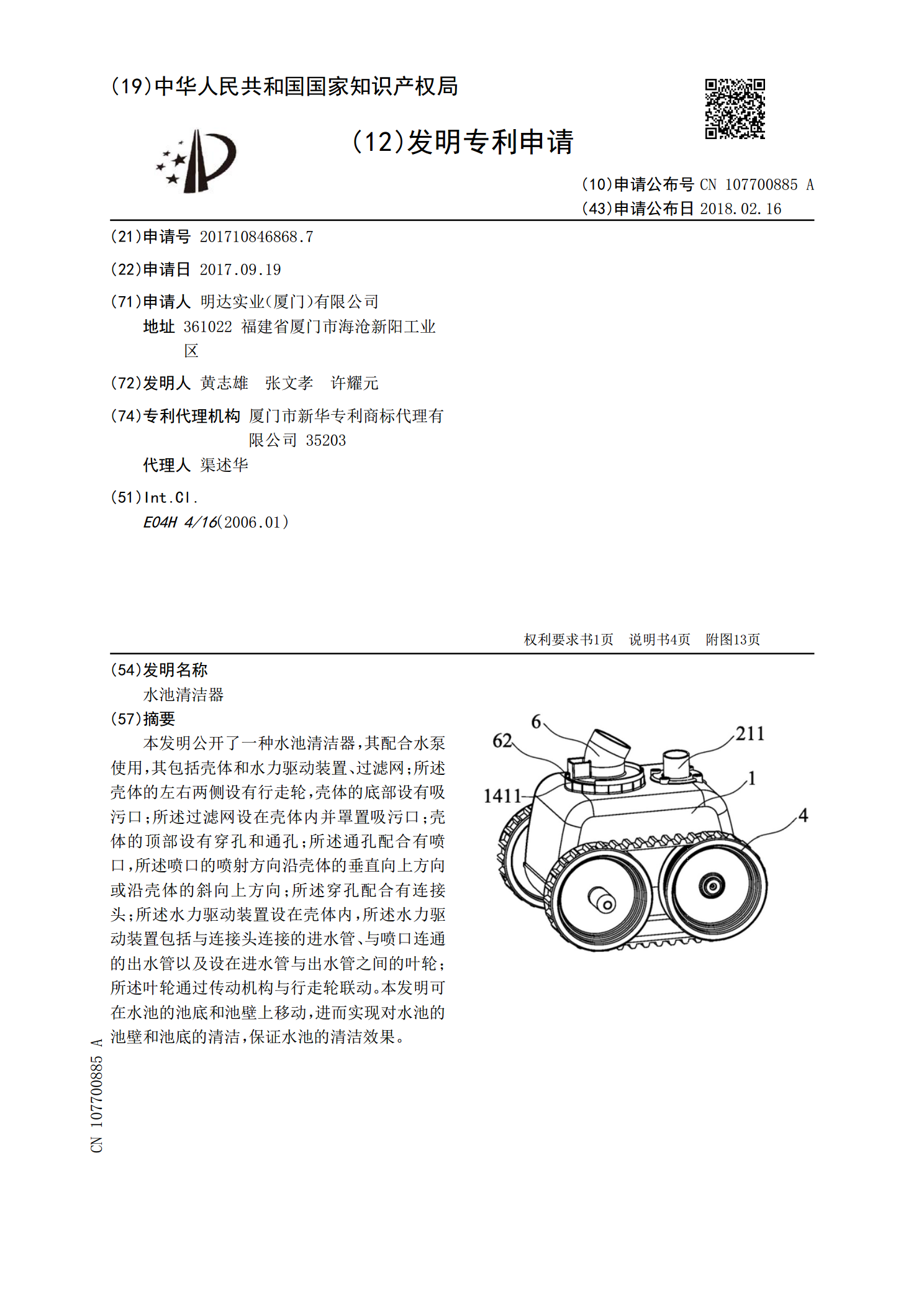
水池清洁器.pdf
本发明公开了一种水池清洁器,其配合水泵使用,其包括壳体和水力驱动装置、过滤网;所述壳体的左右两侧设有行走轮,壳体的底部设有吸污口;所述过滤网设在壳体内并罩置吸污口;壳体的顶部设有穿孔和通孔;所述通孔配合有喷口,所述喷口的喷射方向沿壳体的垂直向上方向或沿壳体的斜向上方向;所述穿孔配合有连接头;所述水力驱动装置设在壳体内,所述水力驱动装置包括与连接头连接的进水管、与喷口连通的出水管以及设在进水管与出水管之间的叶轮;所述叶轮通过传动机构与行走轮联动。本发明可在水池的池底和池壁上移动,进而实现对水池的池壁和池底的