
一种仿蜻蜓式扑翼飞行器.pdf

桂香****盟主

1/8
2/8
3/8
4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿蜻蜓式扑翼飞行器.pdf
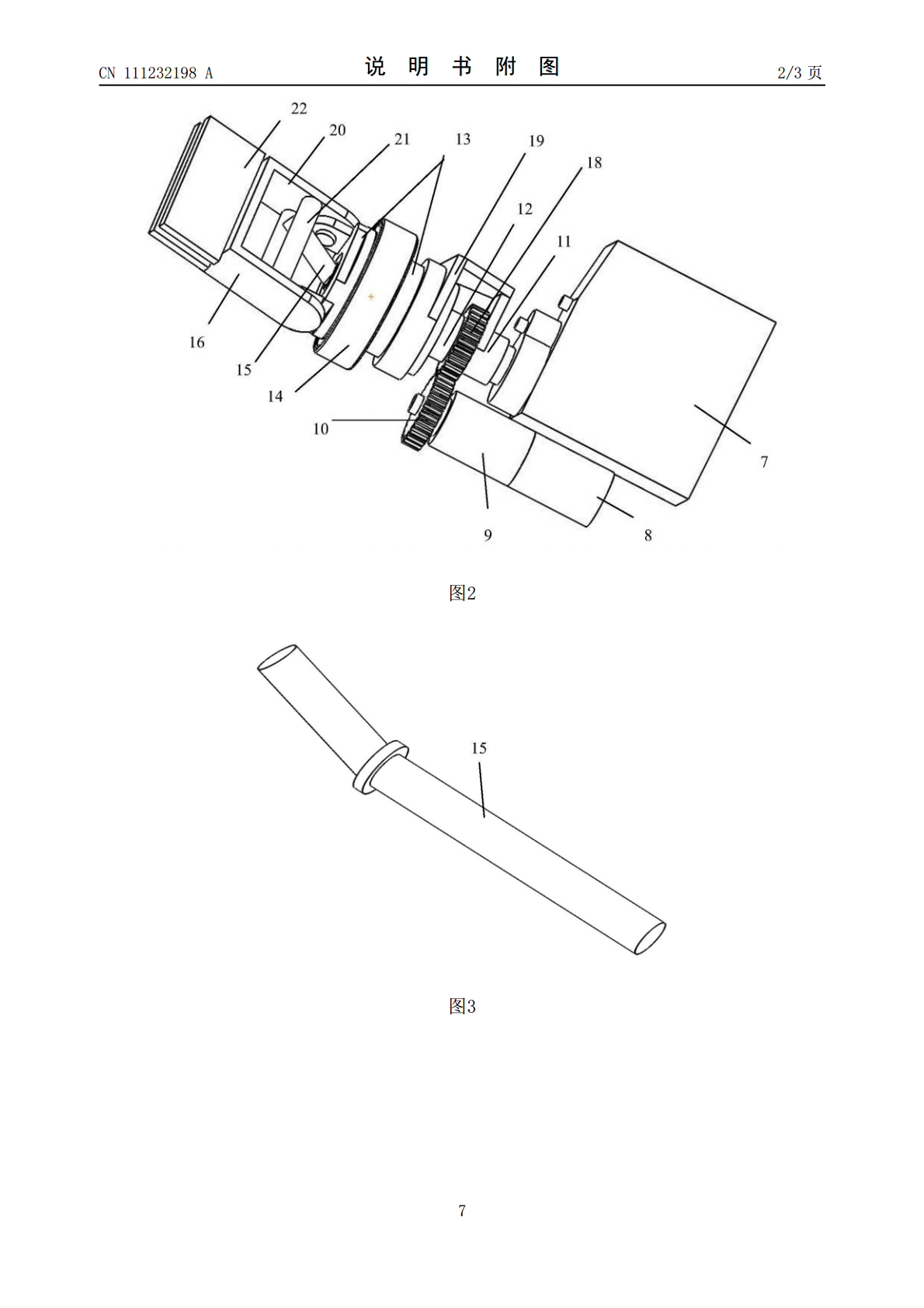
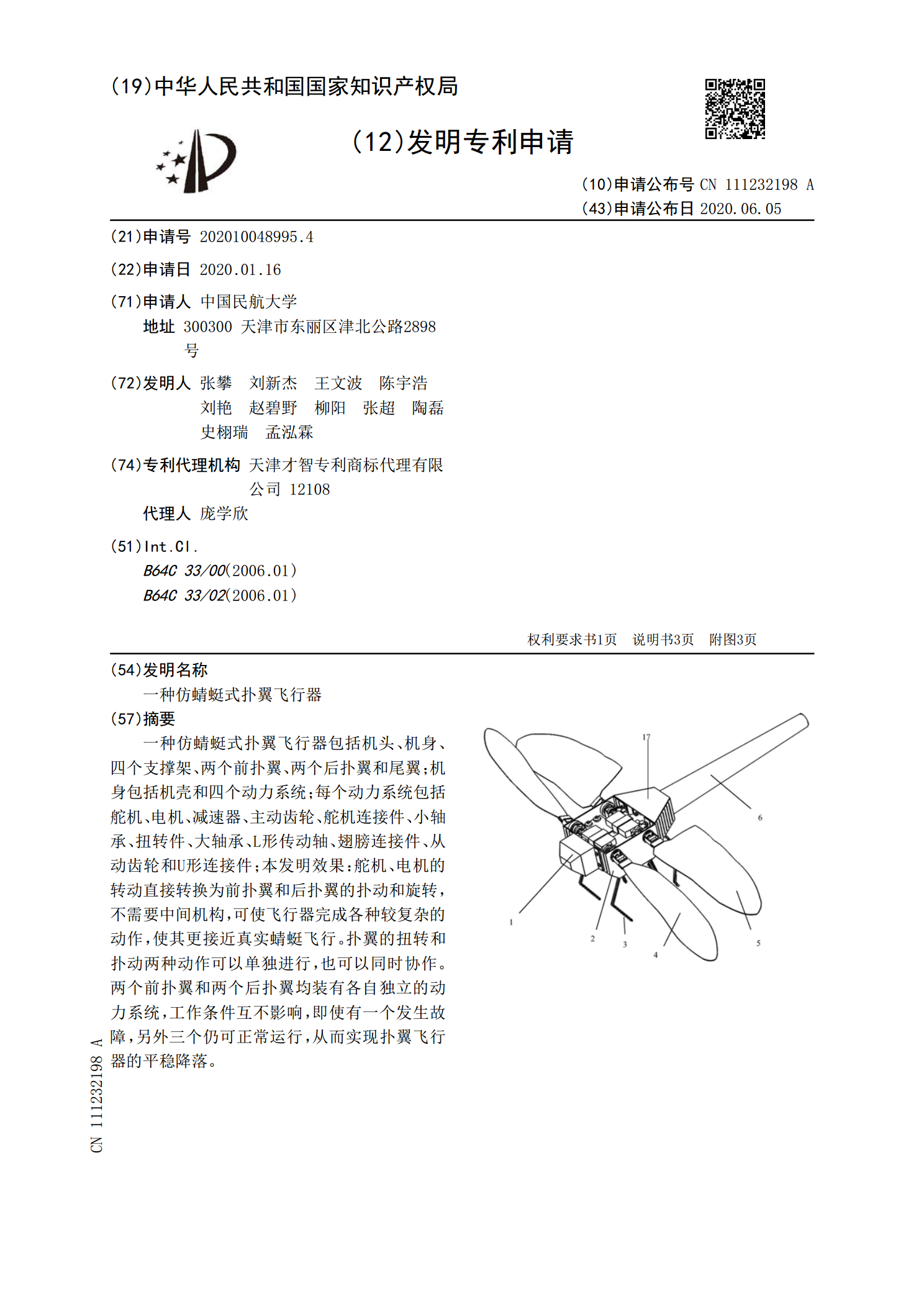
一种仿蜻蜓式扑翼飞行器包括机头、机身、四个支撑架、两个前扑翼、两个后扑翼和尾翼;机身包括机壳和四个动力系统;每个动力系统包括舵机、电机、减速器、主动齿轮、舵机连接件、小轴承、扭转件、大轴承、L形传动轴、翅膀连接件、从动齿轮和U形连接件;本发明效果:舵机、电机的转动直接转换为前扑翼和后扑翼的扑动和旋转,不需要中间机构,可使飞行器完成各种较复杂的动作,使其更接近真实蜻蜓飞行。扑翼的扭转和扑动两种动作可以单独进行,也可以同时协作。两个前扑翼和两个后扑翼均装有各自独立的动力系统,工作条件互不影响,即使有一个发生故

仿蜻蜓四翼微型扑翼飞行器.pdf
本发明公开了一种仿蜻蜓四翼微型扑翼飞行器,包括:机身、两个前扑动翼、两个带有连杆的前翼连接件、两个后扑动翼、两个带有连杆的后翼连接件、主动齿轮、轴齿轮、一级齿轮、两带有连杆的二级齿轮、两带有连杆的三级齿轮、两个前球头连杆、两个后球头连杆、两个舵机连杆、两个舵机、一个直流无刷电机。该仿蜻蜓微型扑翼飞行器基于仿生学设计,相较于现有的固定翼及旋翼飞行器,整体轻便,能源利用效率高,适应低雷诺数飞行环境,可广泛用于低速高机动性飞行的场景中。

一种微型仿蜻蜓双扑翼飞行器.pdf
本发明涉及一种微型仿蜻蜓双扑翼飞行器。该飞行器主要由机架、前后扑翼系统组成。小齿轮(17)和大齿轮(16)啮合传动,大齿轮(16)通过传动轴(15)和转轮(14)以一个可调节的夹角(36)固连,大齿轮(16)、连杆a(23)、带扇形齿轮的前右摇杆(24)、Y型前支架(18)和转轮(14)、连杆b(34)、带扇形齿轮的后右摇杆(33)、Y型后支架(20)分别组成曲柄摇杆机构,前后扑翼系统分别通过扇形齿轮啮合传动实现对称扑动。与现有技术相比,本发明具有以简单紧凑的结构实现单电机驱动双扑翼,前后扑翼系统的扑动均
一种仿蜻蜓双翅微型扑翼飞行器.pdf
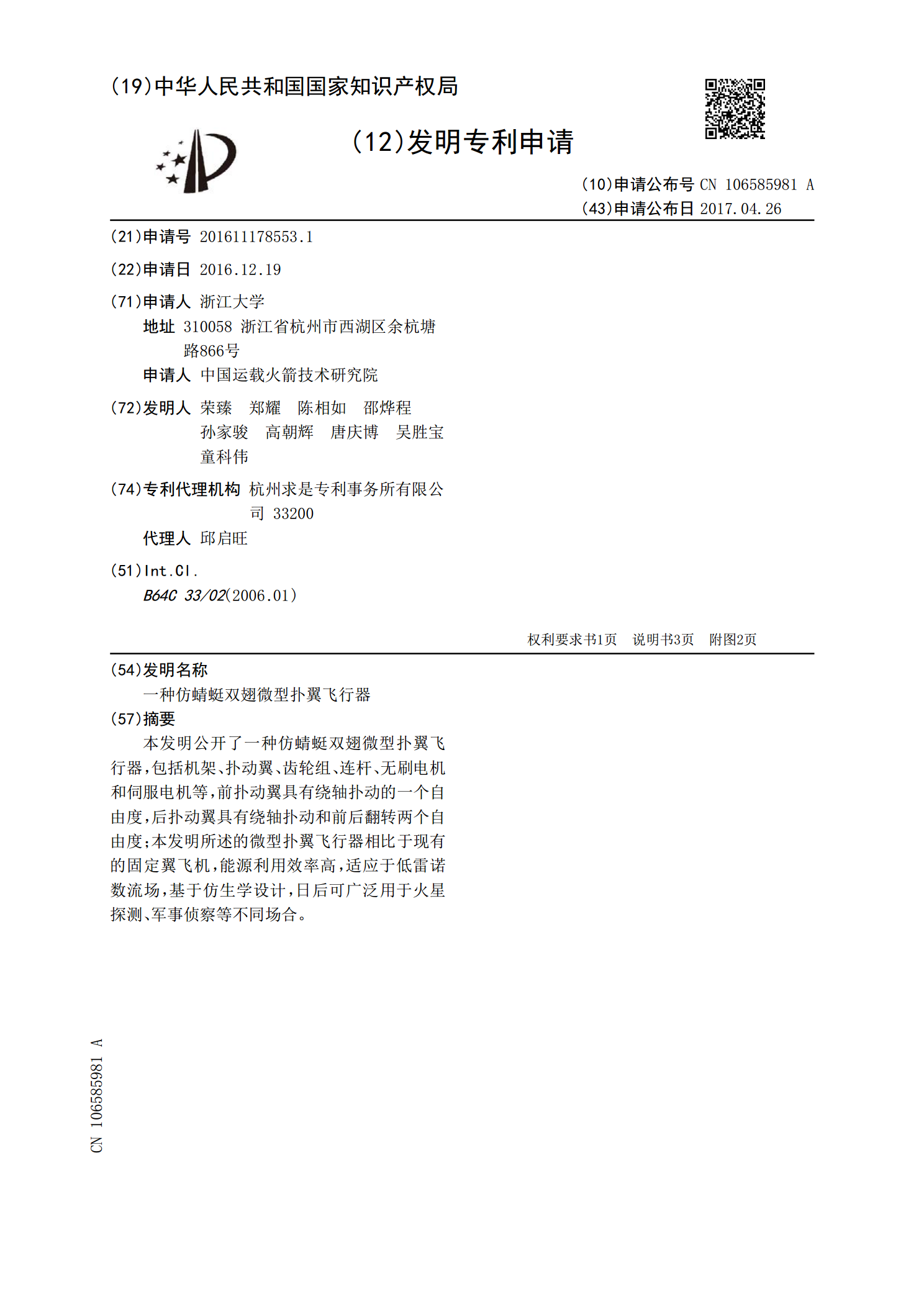
本发明公开了一种仿蜻蜓双翅微型扑翼飞行器,包括机架、扑动翼、齿轮组、连杆、无刷电机和伺服电机等,前扑动翼具有绕轴扑动的一个自由度,后扑动翼具有绕轴扑动和前后翻转两个自由度;本发明所述的微型扑翼飞行器相比于现有的固定翼飞机,能源利用效率高,适应于低雷诺数流场,基于仿生学设计,日后可广泛用于火星探测、军事侦察等不同场合。
一种微型仿蜻蜓双扑翼飞行器.pdf
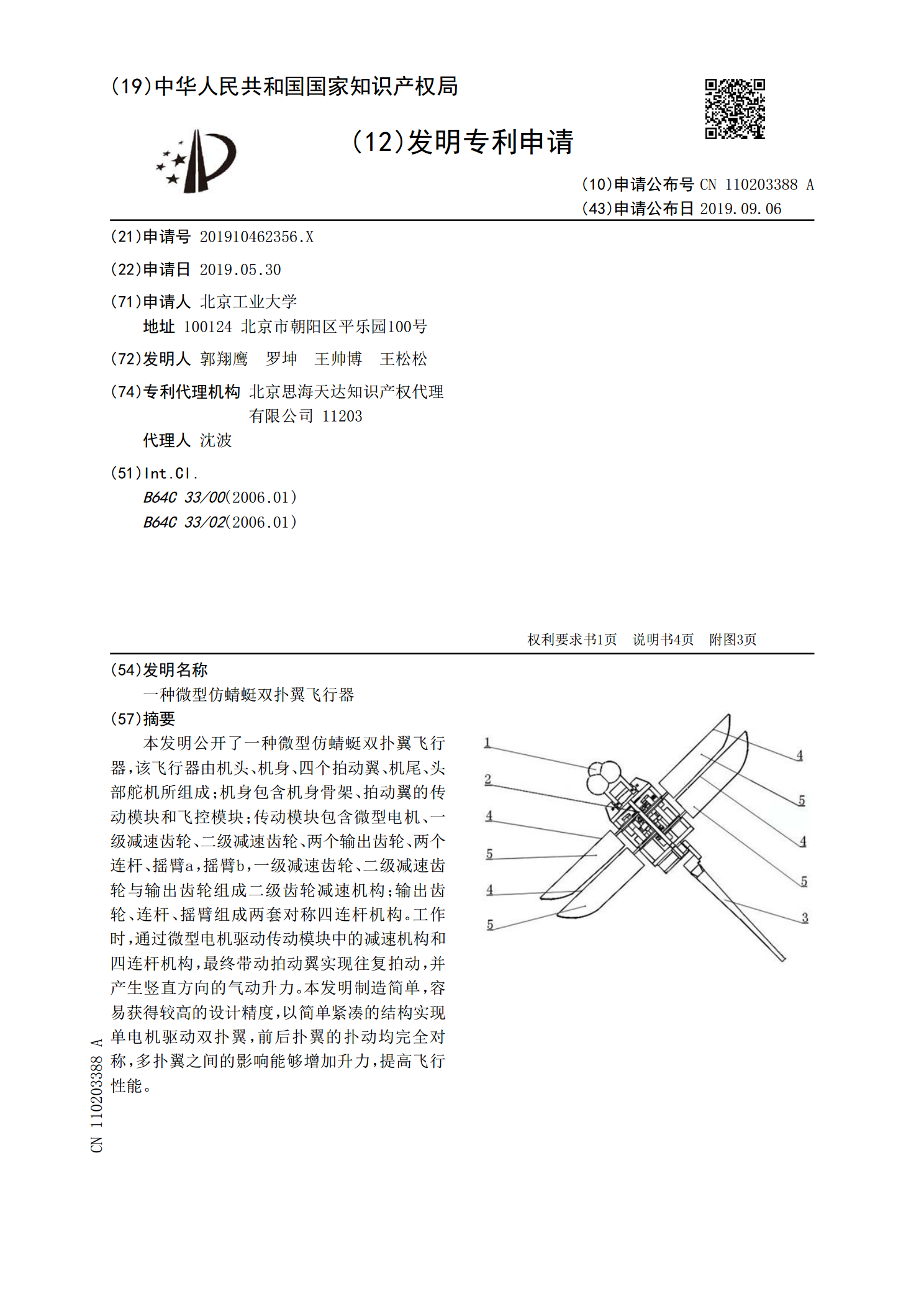
本发明公开了一种微型仿蜻蜓双扑翼飞行器,该飞行器由机头、机身、四个拍动翼、机尾、头部舵机所组成;机身包含机身骨架、拍动翼的传动模块和飞控模块;传动模块包含微型电机、一级减速齿轮、二级减速齿轮、两个输出齿轮、两个连杆、摇臂a,摇臂b,一级减速齿轮、二级减速齿轮与输出齿轮组成二级齿轮减速机构;输出齿轮、连杆、摇臂组成两套对称四连杆机构。工作时,通过微型电机驱动传动模块中的减速机构和四连杆机构,最终带动拍动翼实现往复拍动,并产生竖直方向的气动升力。本发明制造简单,容易获得较高的设计精度,以简单紧凑的结构实现单电