
牛腿支撑机器人.pdf

佳晨****ng

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
牛腿支撑机器人.pdf
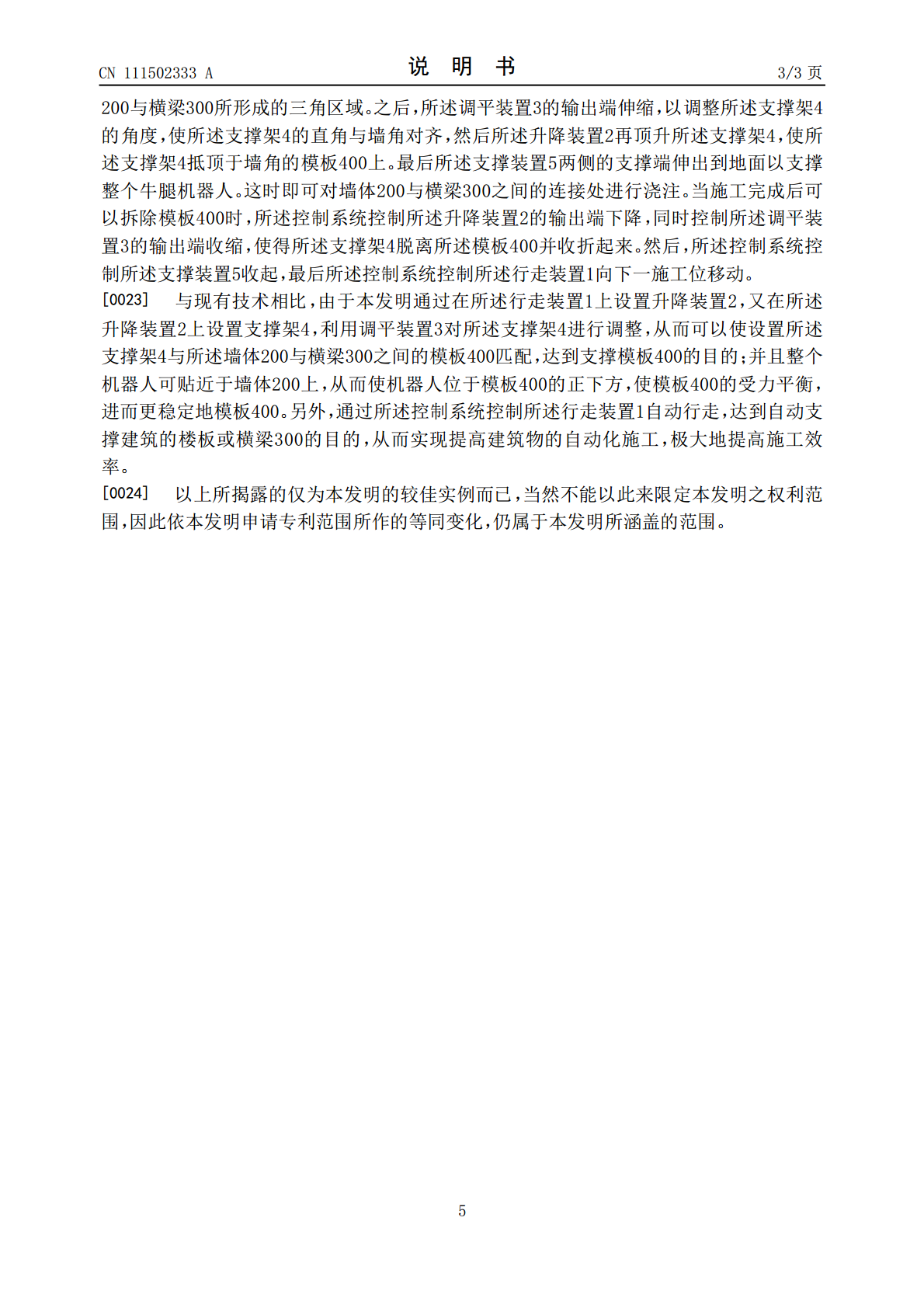
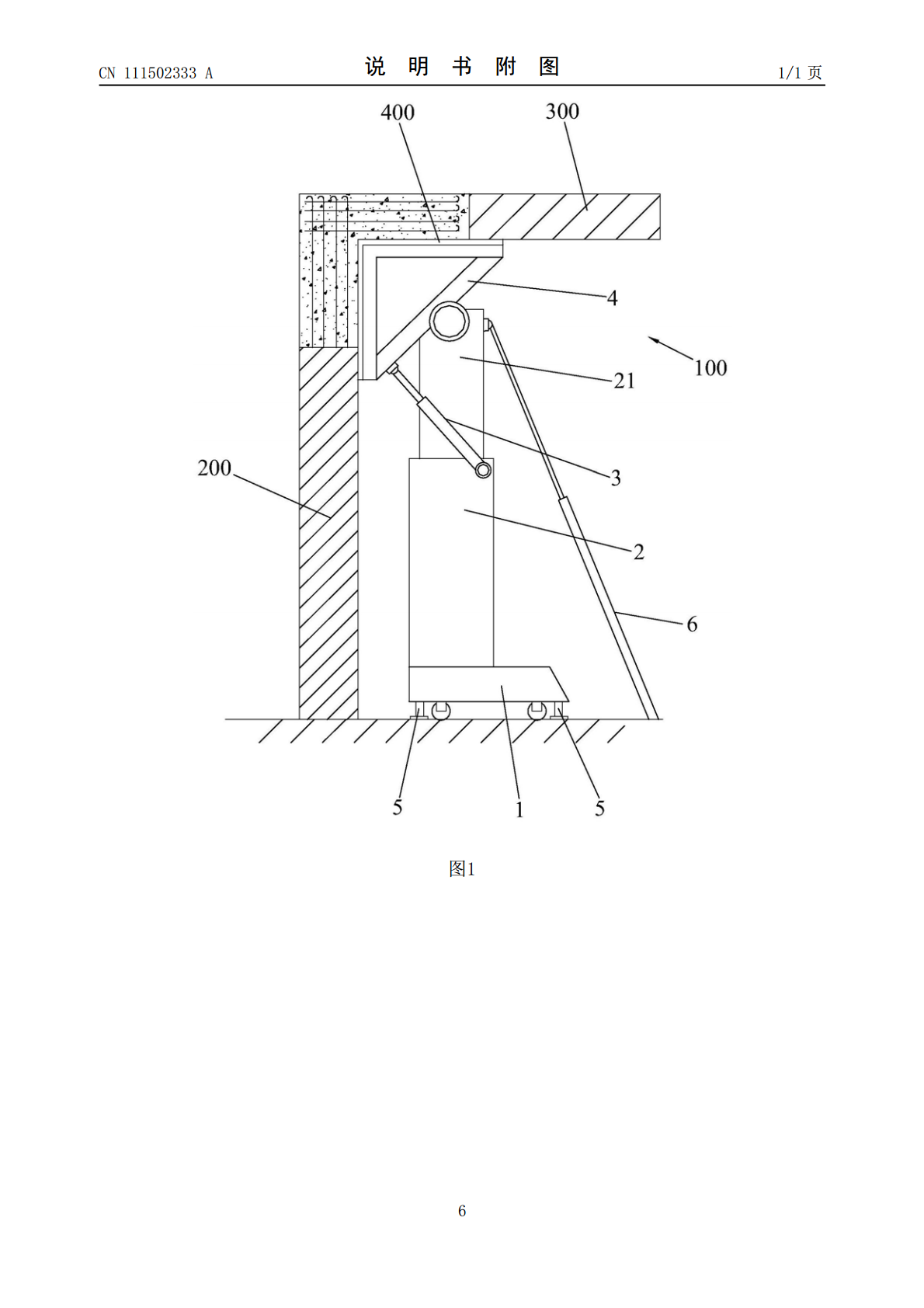
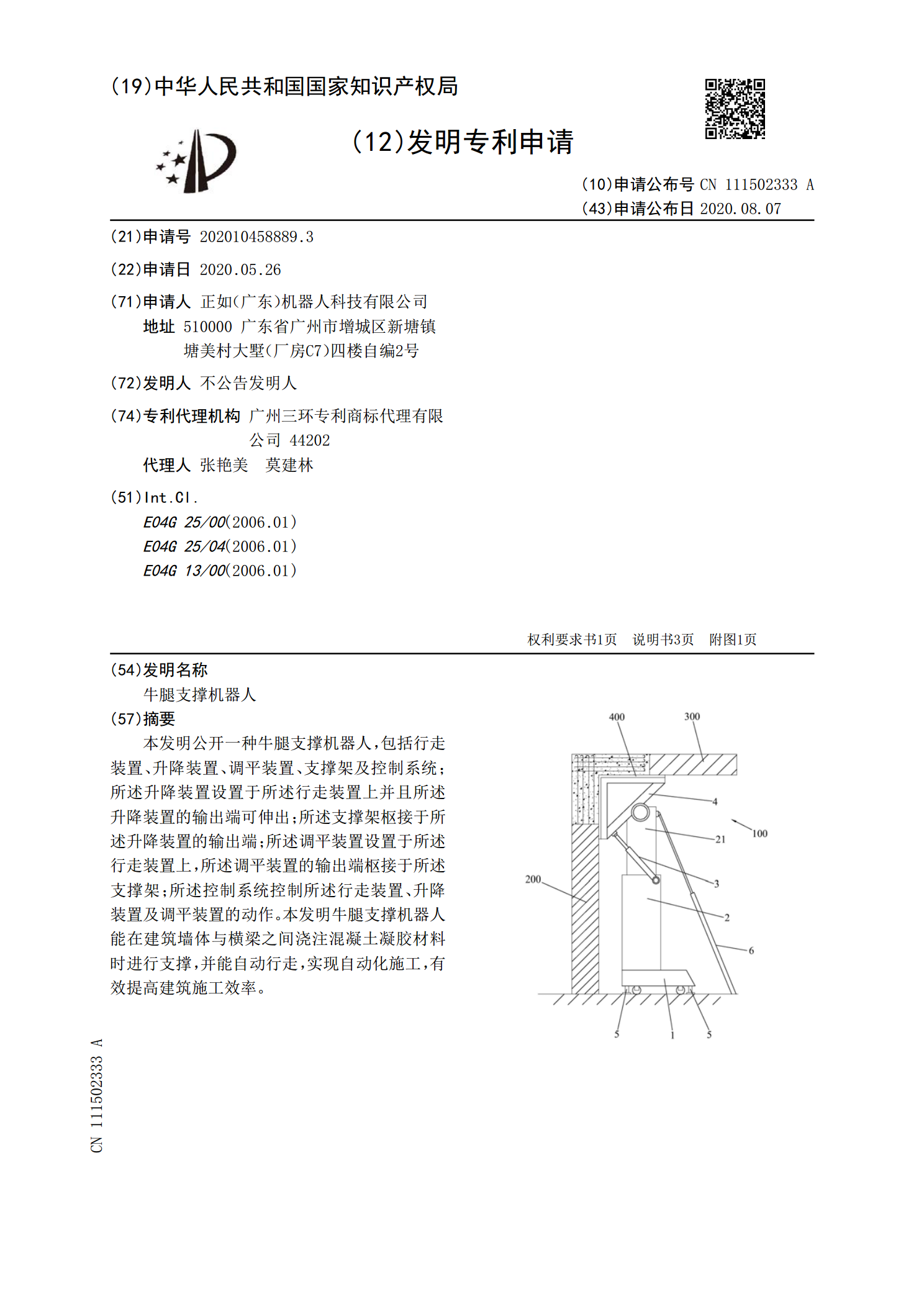
本发明公开一种牛腿支撑机器人,包括行走装置、升降装置、调平装置、支撑架及控制系统;所述升降装置设置于所述行走装置上并且所述升降装置的输出端可伸出;所述支撑架枢接于所述升降装置的输出端;所述调平装置设置于所述行走装置上,所述调平装置的输出端枢接于所述支撑架;所述控制系统控制所述行走装置、升降装置及调平装置的动作。本发明牛腿支撑机器人能在建筑墙体与横梁之间浇注混凝土凝胶材料时进行支撑,并能自动行走,实现自动化施工,有效提高建筑施工效率。
用于顶升模架体系的支撑牛腿及其支撑伸缩牛腿方法.pdf
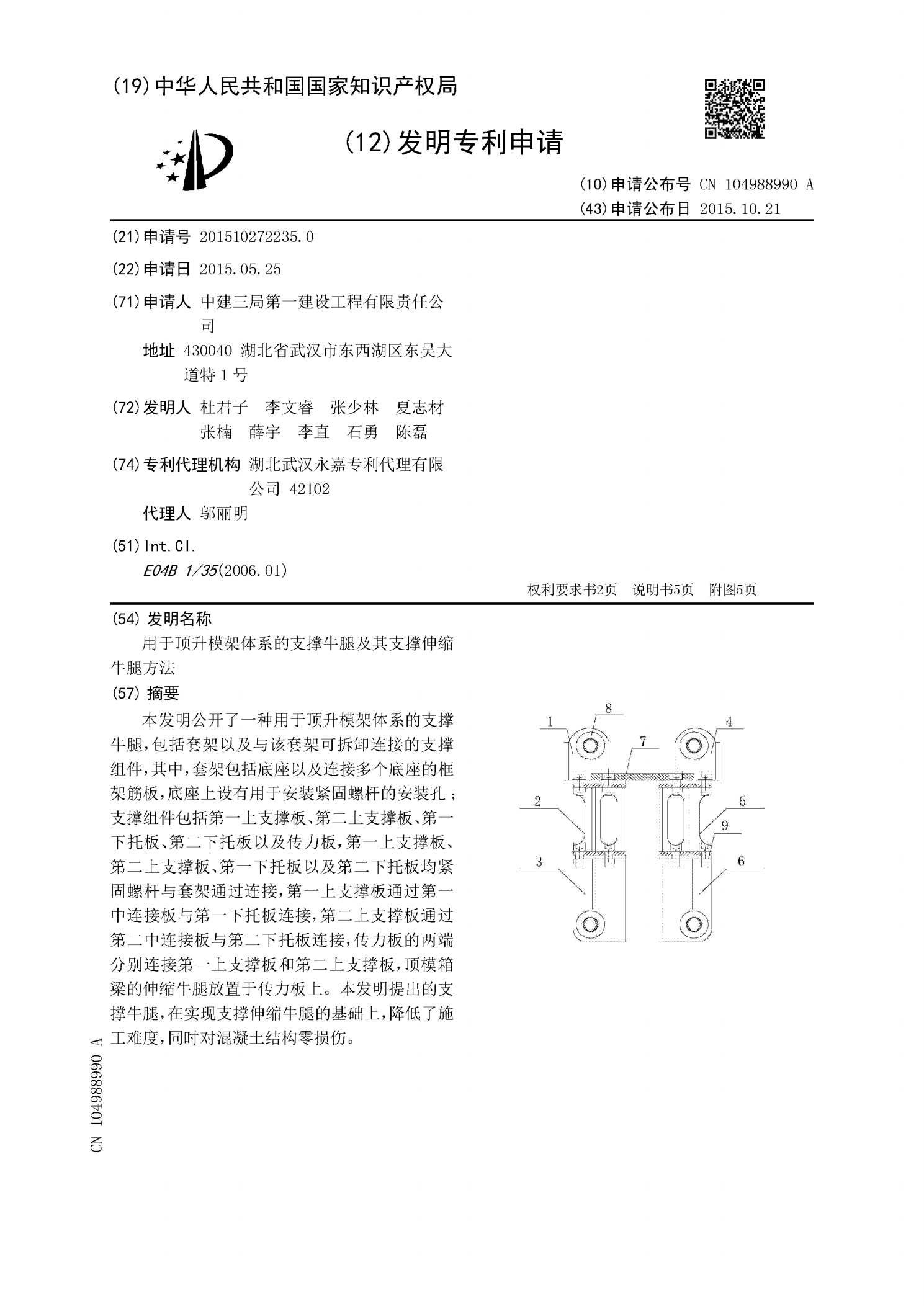
本发明公开了一种用于顶升模架体系的支撑牛腿,包括套架以及与该套架可拆卸连接的支撑组件,其中,套架包括底座以及连接多个底座的框架筋板,底座上设有用于安装紧固螺杆的安装孔;支撑组件包括第一上支撑板、第二上支撑板、第一下托板、第二下托板以及传力板,第一上支撑板、第二上支撑板、第一下托板以及第二下托板均紧固螺杆与套架通过连接,第一上支撑板通过第一中连接板与第一下托板连接,第二上支撑板通过第二中连接板与第二下托板连接,传力板的两端分别连接第一上支撑板和第二上支撑板,顶模箱梁的伸缩牛腿放置于传力板上。本发明提出的支撑

一种假牛腿支撑架.pdf
本发明涉及一种假牛腿支撑架,包括倾斜放置的主板,所述主板的左右两侧各套有一竖直放置的侧板,所述侧板均可在主板上左右滑动,所述主板的左端和右端均设有支撑板,所述支撑板上均通有一号丝杠,所述一号丝杠的外端均固定有法兰,所述侧板的外端面上均设有缩颈槽,所述缩颈槽的内部直径大于缩颈槽开口处的直径,所述一号丝杠的内端分别通向对应缩颈槽内,一号丝杠的内端均固定有直径小于缩颈槽开口直径的端块。本发明的有益效果是:本发明通过可反复利用的模具制作假牛腿,提高了假牛腿的制作速度,提高了施工便利性,减轻了劳动施工负担,降低了制
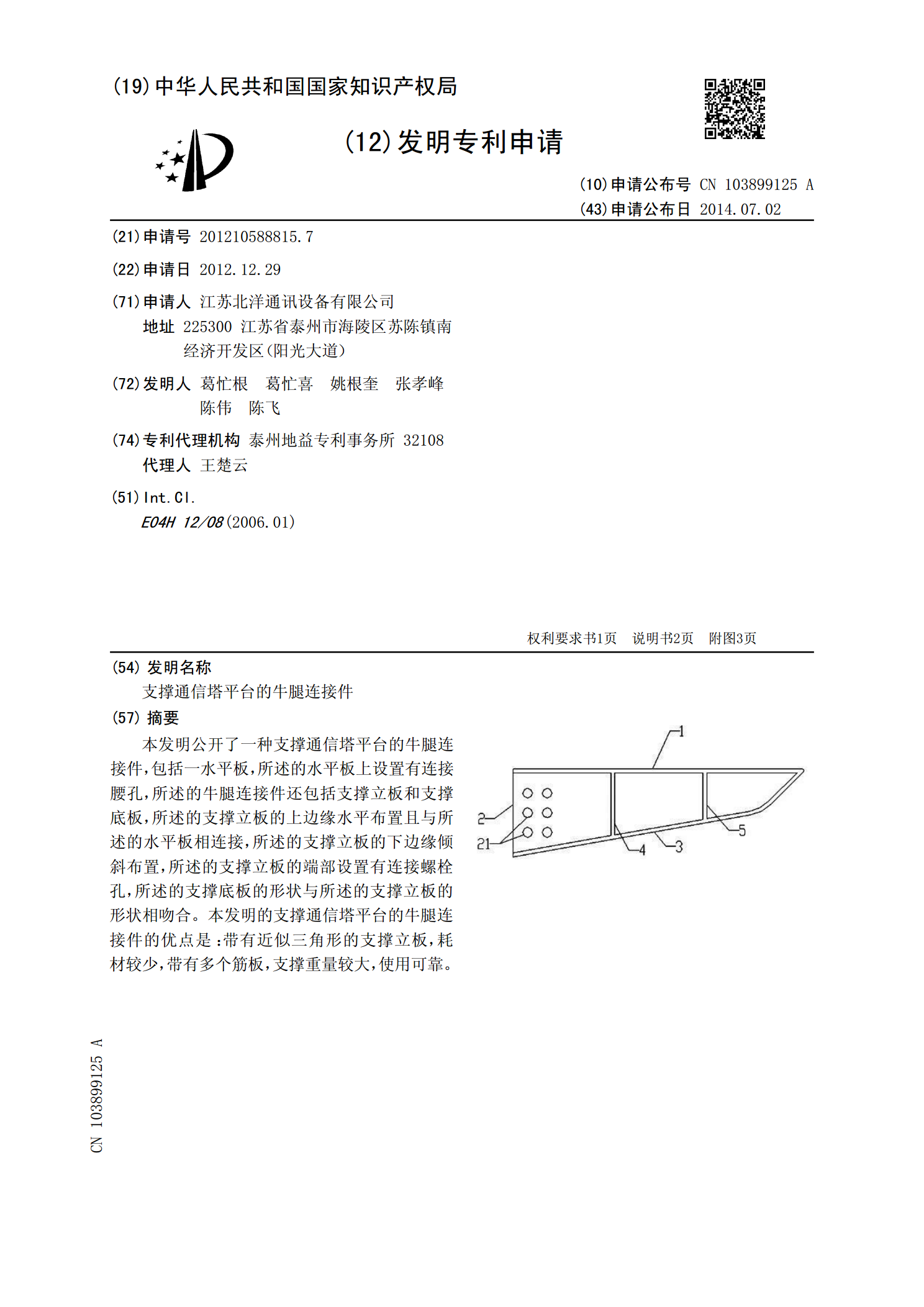
支撑通信塔平台的牛腿连接件.pdf
本发明公开了一种支撑通信塔平台的牛腿连接件,包括一水平板,所述的水平板上设置有连接腰孔,所述的牛腿连接件还包括支撑立板和支撑底板,所述的支撑立板的上边缘水平布置且与所述的水平板相连接,所述的支撑立板的下边缘倾斜布置,所述的支撑立板的端部设置有连接螺栓孔,所述的支撑底板的形状与所述的支撑立板的形状相吻合。本发明的支撑通信塔平台的牛腿连接件的优点是:带有近似三角形的支撑立板,耗材较少,带有多个筋板,支撑重量较大,使用可靠。
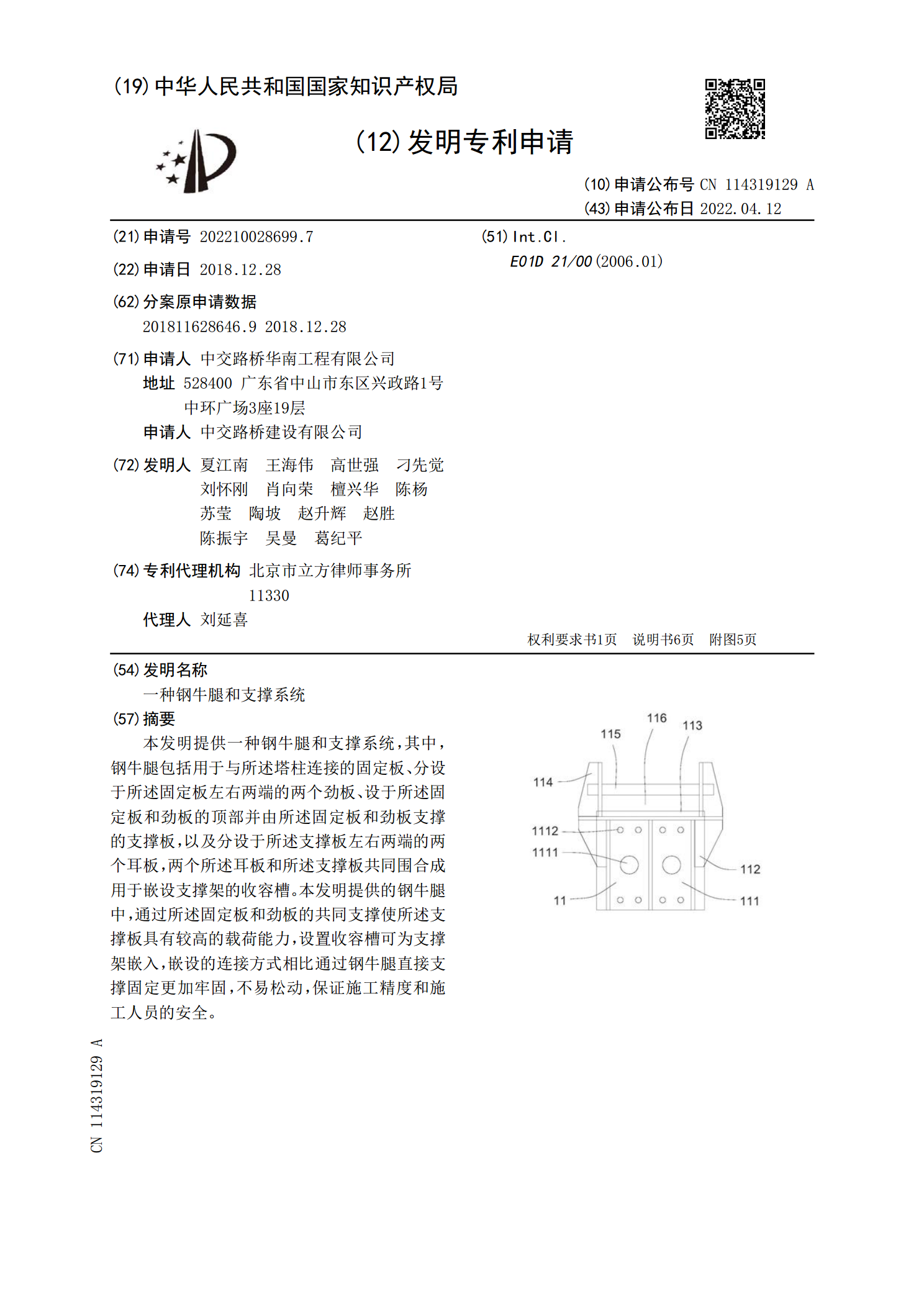
一种钢牛腿和支撑系统.pdf
本发明提供一种钢牛腿和支撑系统,其中,钢牛腿包括用于与所述塔柱连接的固定板、分设于所述固定板左右两端的两个劲板、设于所述固定板和劲板的顶部并由所述固定板和劲板支撑的支撑板,以及分设于所述支撑板左右两端的两个耳板,两个所述耳板和所述支撑板共同围合成用于嵌设支撑架的收容槽。本发明提供的钢牛腿中,通过所述固定板和劲板的共同支撑使所述支撑板具有较高的载荷能力,设置收容槽可为支撑架嵌入,嵌设的连接方式相比通过钢牛腿直接支撑固定更加牢固,不易松动,保证施工精度和施工人员的安全。