
一种船模近场波形测量系统及其测量方法.pdf

白真****ng

1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种船模近场波形测量系统及其测量方法.pdf
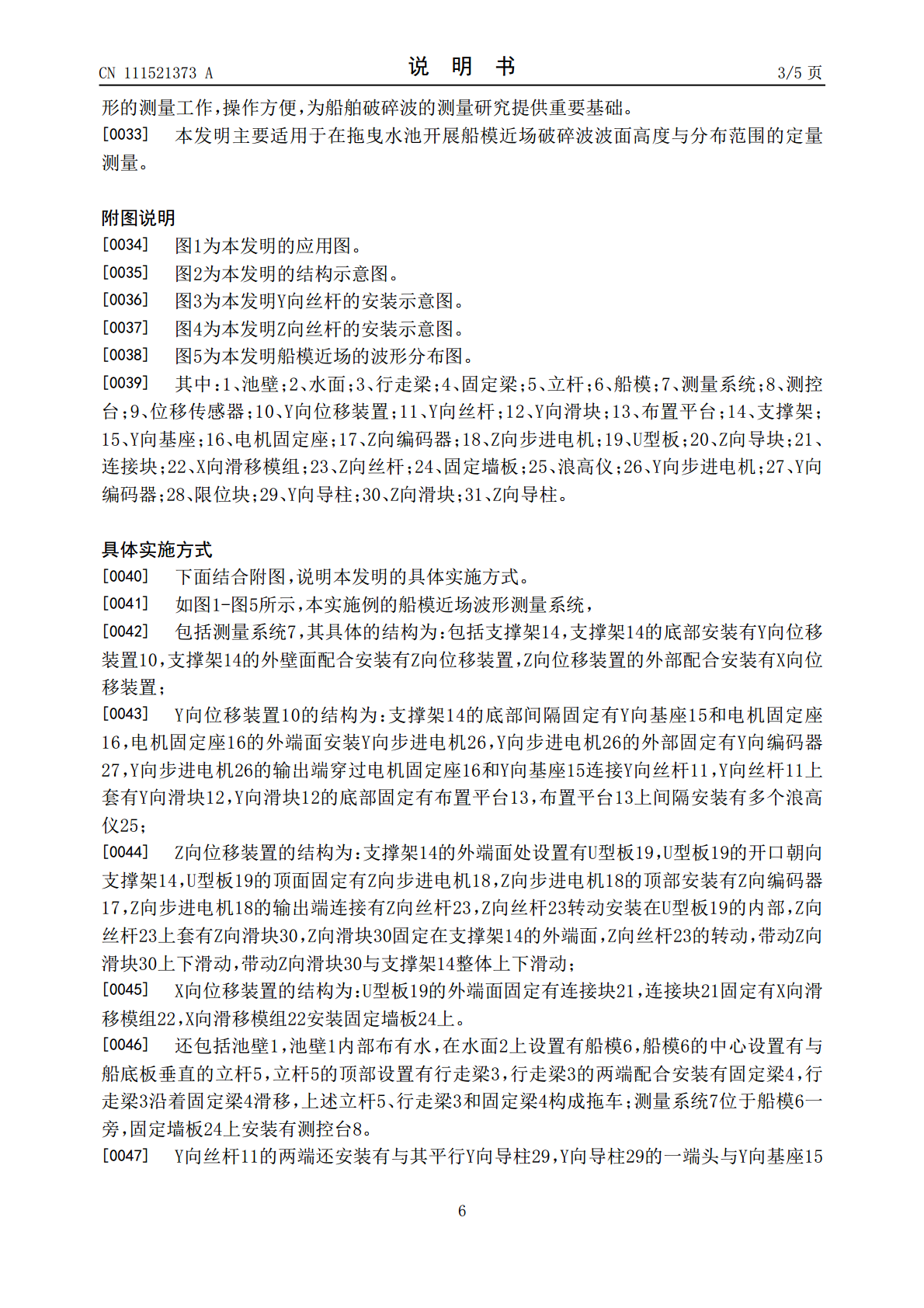
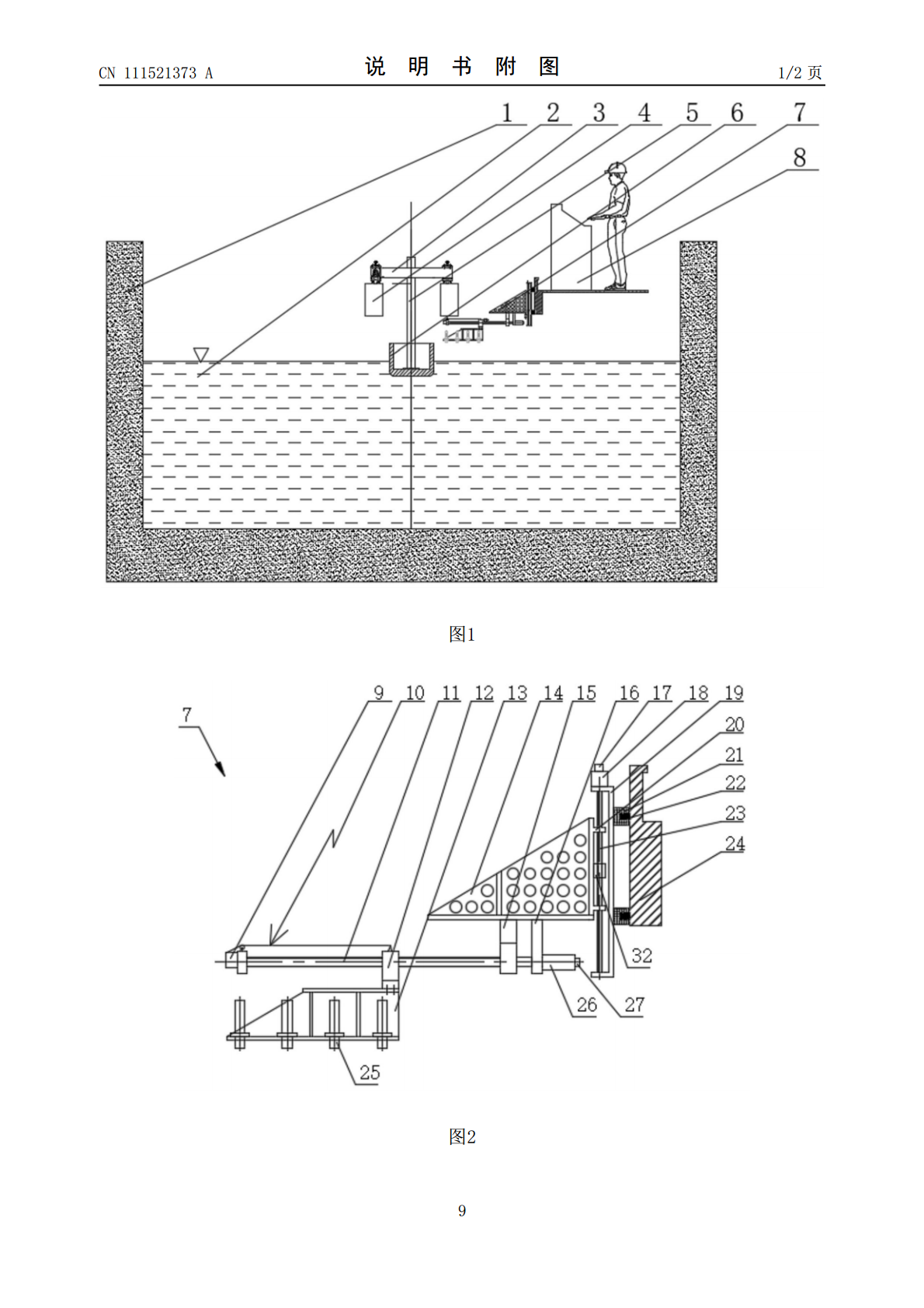
本发明涉及一种船模近场波形测量系统及其测量方法,包括测量系统,其具体的结构为:包括支撑架,所述支撑架的底部安装有Y向位移装置,所述支撑架的外壁面配合安装有Z向位移装置,Z向位移装置的外部配合安装有X向位移装置;通过测量系统与船模、拖车的配合工作,通过分别改变X、Y、Z三个方向的位移,以及浪高仪的数据测量和存储,可以方便的完成船模近场波形的测量工作,操作方便,为船舶破碎波的测量研究提供重要基础。
一种船模阻力及姿态测量装置及测量方法.pdf
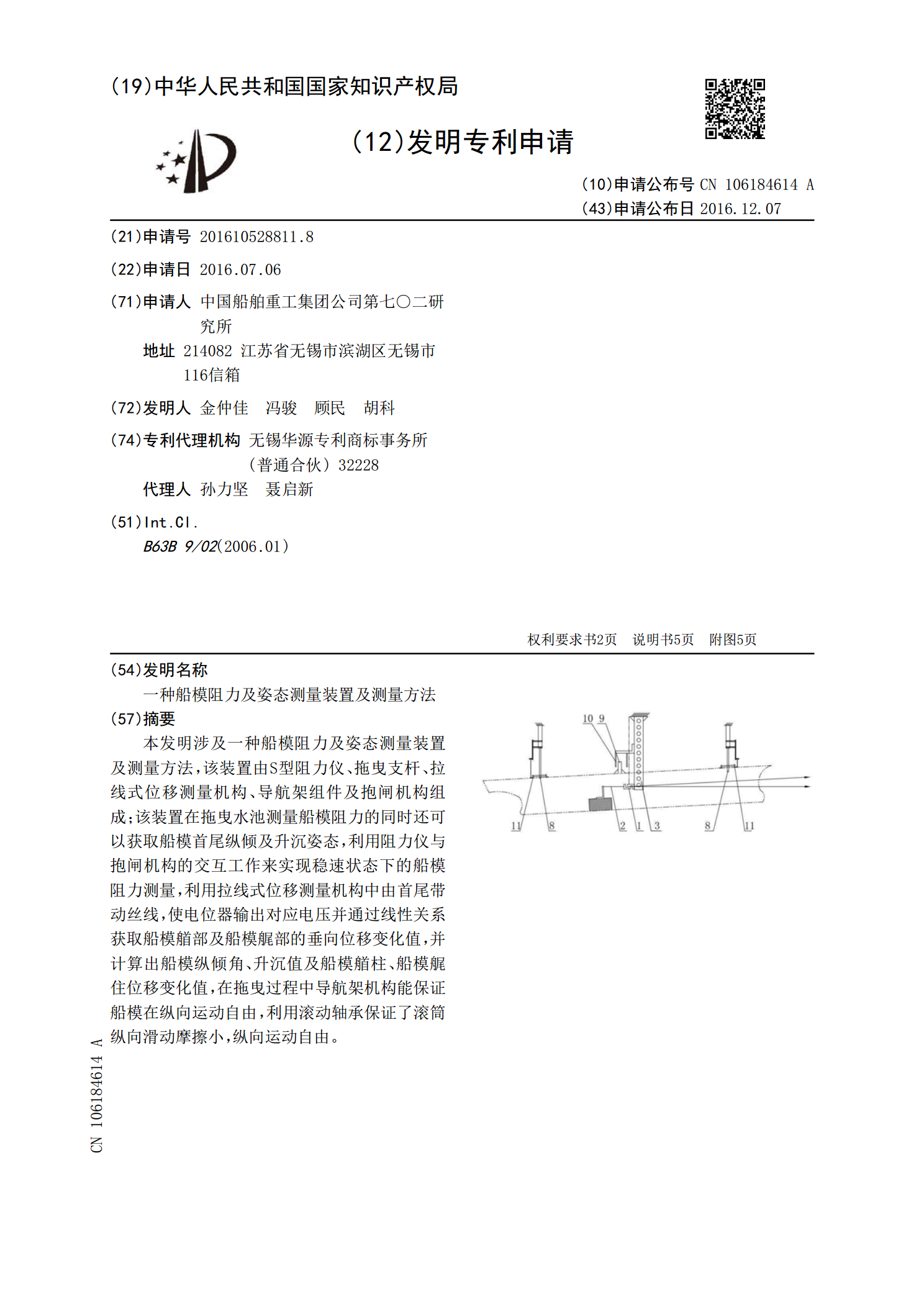
本发明涉及一种船模阻力及姿态测量装置及测量方法,该装置由S型阻力仪、拖曳支杆、拉线式位移测量机构、导航架组件及抱闸机构组成;该装置在拖曳水池测量船模阻力的同时还可以获取船模首尾纵倾及升沉姿态,利用阻力仪与抱闸机构的交互工作来实现稳速状态下的船模阻力测量,利用拉线式位移测量机构中由首尾带动丝线,使电位器输出对应电压并通过线性关系获取船模艏部及船模艉部的垂向位移变化值,并计算出船模纵倾角、升沉值及船模艏柱、船模艉住位移变化值,在拖曳过程中导航架机构能保证船模在纵向运动自由,利用滚动轴承保证了滚筒纵向滑动摩擦小

一种极平面近场测量方法.docx
一种极平面近场测量方法标题:一种基于压电传感器的极平面近场测量方法摘要:本文提出了一种基于压电传感器的极平面近场测量方法。该方法利用压电传感器的高灵敏度和快速响应特性,实现对天线近场中电场的测量。通过使用极平面设备,可以实现对电场的全方位和连续测量,提高了测量的准确性和可重复性。实验结果表明,该方法具有较高的测量精度,并对电场分布进行了准确的恢复。关键词:极平面,近场测量,压电传感器,电场1.引言近年来,随着通信技术的快速发展,对电磁波的测量需求越来越高。电场测量是其中一个重要的研究方向,它能够帮助我们了

近场测量方法研究.docx
近场测量方法研究近场测量方法研究摘要:近场测量方法是一种用于研究物体表面和材料特性的重要技术手段。本论文首先介绍了近场测量方法的基本原理和分类,然后详细阐述了几种常见的近场测量方法,包括近场扫描电子显微镜(NSOM)、原子力显微镜(AFM)、光学近场显微镜(SNOM)等。对比分析了这些方法的优缺点,并对未来近场测量方法的发展方向进行了展望。关键词:近场测量方法,近场扫描电子显微镜,原子力显微镜,光学近场显微镜1.引言近场测量方法是一种近年来发展迅速的物理技术,它可以突破传统显微镜分辨率的限制,实现对纳米尺

一种测量电容系统及其测量方法.pdf
本发明公开了一种测量电容系统及其测量方法,包含:充电电流源,其对待测电容进行充电;放电电流源,其对所述待测电容进行放电;比较器组,其输入端与所述待测电容的第一端连接;所述待测电容为比较器组提供初始比较电压值,即待测电容的电压值V