
一种补偿表面微观形貌白光干涉测量方法及系统.pdf

小新****ou

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种补偿表面微观形貌白光干涉测量方法及系统.pdf
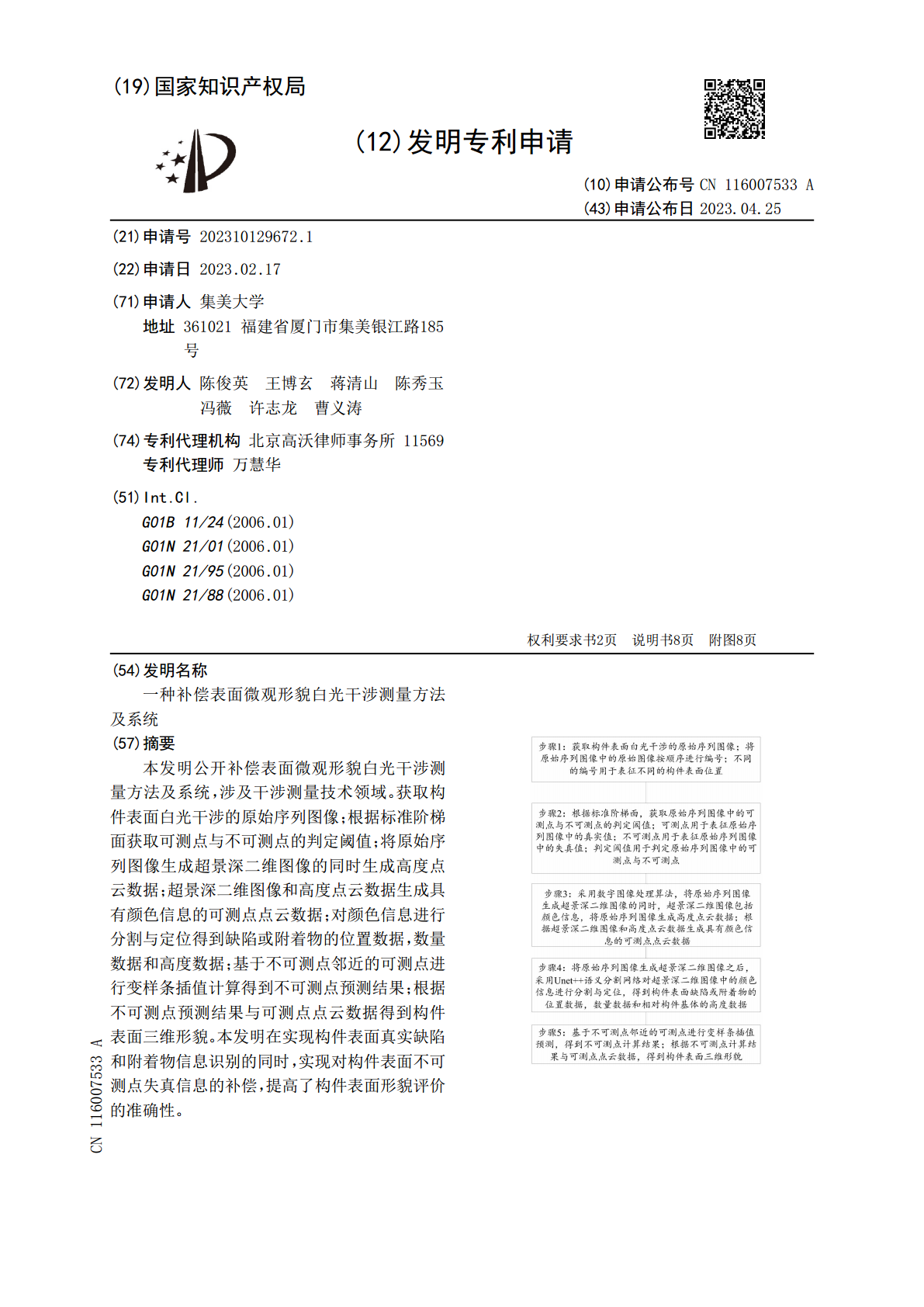
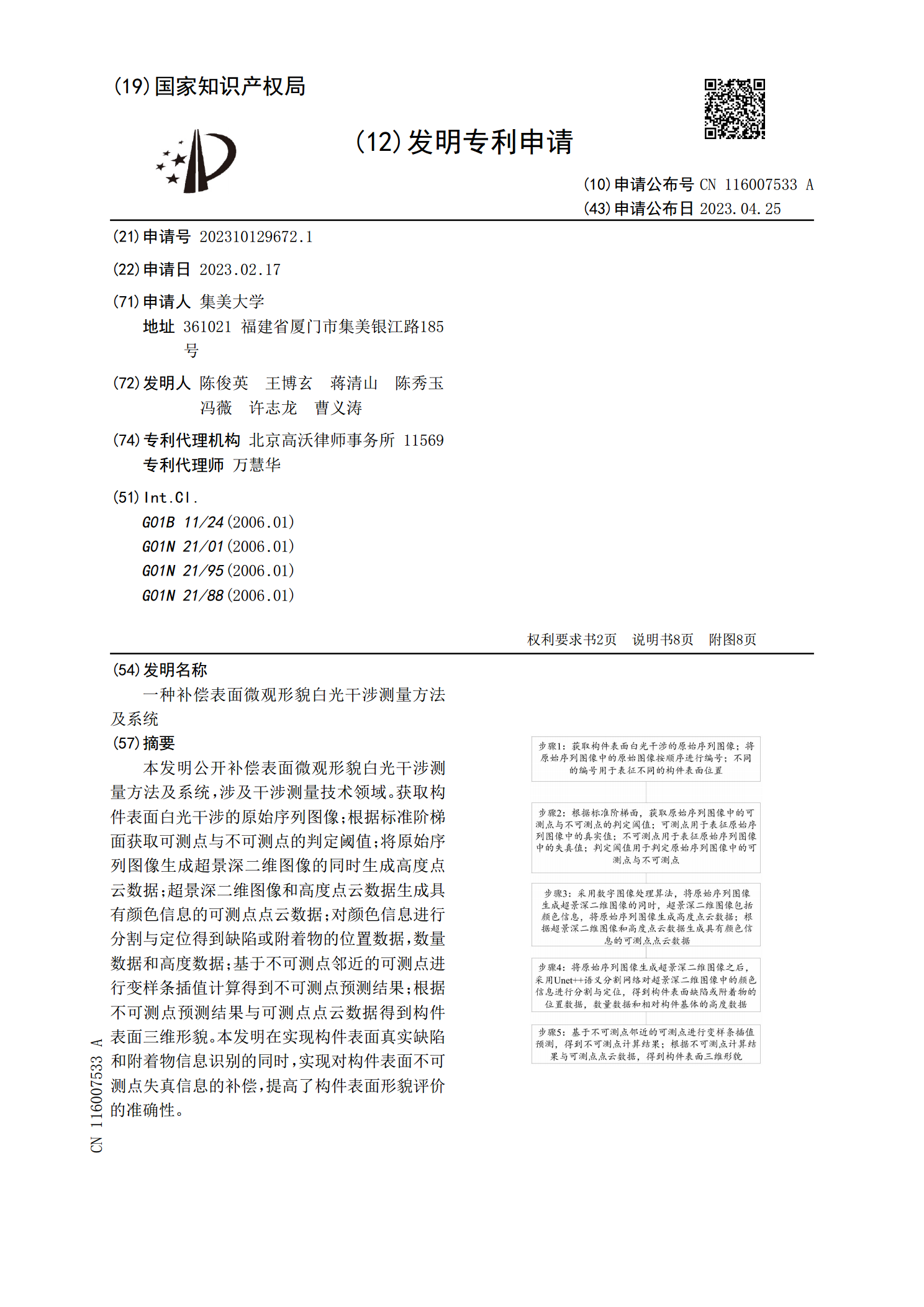
本发明公开补偿表面微观形貌白光干涉测量方法及系统,涉及干涉测量技术领域。获取构件表面白光干涉的原始序列图像;根据标准阶梯面获取可测点与不可测点的判定阈值;将原始序列图像生成超景深二维图像的同时生成高度点云数据;超景深二维图像和高度点云数据生成具有颜色信息的可测点点云数据;对颜色信息进行分割与定位得到缺陷或附着物的位置数据,数量数据和高度数据;基于不可测点邻近的可测点进行变样条插值计算得到不可测点预测结果;根据不可测点预测结果与可测点点云数据得到构件表面三维形貌。本发明在实现构件表面真实缺陷和附着物信息识别

基于白光干涉的微观形貌检测系统设计研究.docx
基于白光干涉的微观形貌检测系统设计研究基于白光干涉的微观形貌检测系统设计研究摘要:本论文研究基于白光干涉的微观形貌检测系统的设计。该系统通过白光干涉原理实现对微观表面形貌的快速高精度检测。首先介绍了白光干涉原理及其在形貌检测中的应用。然后,详细讨论了系统设计的关键问题,包括光源选择、干涉信号的获取与处理、形貌重建算法等。最后,进行了实验验证,结果表明该系统能够准确地检测微观表面形貌,并具有一定的实用价值。关键词:白光干涉;形貌检测;光源选择;干涉信号处理;形貌重建算法1.引言微观形貌检测在许多领域中都具有

基于白光垂直扫描干涉法量物体微观表面形貌的研究.docx
基于白光垂直扫描干涉法量物体微观表面形貌的研究摘要:本文主要研究了基于白光垂直扫描干涉法量物体微观表面形貌的方法和原理。在论文中,我们通过介绍白光干涉法的基本原理和涉及到的技术装置,说明了白光垂直扫描干涉法的工作原理和测量精度。然后,我们详细阐述了该方法在研究物体微观表面形貌方面的应用,包括其在材料科学、制造业和生物医学等领域的广泛应用。最后,我们提出了未来发展的方向和创新点,以进一步推动该方法在微观表面形貌研究领域的应用和发展。关键词:白光干涉法;垂直扫描;微观表面形貌;应用;发展方向正文:1.引言微观

基于白光干涉的微观形貌检测系统设计研究的开题报告.docx
基于白光干涉的微观形貌检测系统设计研究的开题报告一、选题背景和意义微观形貌检测技术(MicroSurfaceInspection,MSI)是一项非常具有发展潜力的新兴领域,该技术在电子、生物医药、食品等行业有着广泛的应用。MSI可以用于对微观表面的形貌定量测量、缺陷检测、质量控制等方面,有着非常重要的意义。目前,科学家和工程师们已经实现了不同种类的微观形貌检测技术,并且该领域还在不断的发展。其中,一种常见的技术是基于白光干涉的微观形貌检测技术,该技术具有非常高的精度和可靠性。因此,对于这种检测技术的研究和

基于白光干涉的微观形貌检测系统设计研究的任务书.docx
基于白光干涉的微观形貌检测系统设计研究的任务书任务书一、课题背景随着科学技术的不断发展和进步,微纳米科技已经成为现代工业中的重要组成部分。众所周知,微观形貌的检测是微纳米工业制造中至关重要的一环。传统的微观形貌检测方法采用观察放大后的部件的面形状和表面光泽,但这些方法存在精度不够高和无法适应高精度工作要求的缺陷。因此,开发一种基于白光干涉的微观形貌检测系统是十分必要的。二、课题任务本研究的主要任务是设计和研究一种基于白光干涉的微观形貌检测系统。根据实验需要,在满足测量要求和原理的前提下,确定实验中各项参数