
一种水下航行器.pdf

书生****文章

1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种水下航行器.pdf
本发明公开了一种水下航行器,包括壳体及安装在壳体上的叶轮组件,壳体内安装有陀螺组件,陀螺组件包括陀螺支架和控制力矩陀螺群,控制力矩陀螺群包括四个单框架控制力矩陀螺,每个单框架控制力矩陀螺均包括单框架、陀螺转子、单框架转轴、单框架驱动电机和陀螺转子驱动电机,单框架驱动电机安装在陀螺支架上并通过单框架转轴驱动单框架旋转,陀螺转子驱动电机和陀螺转子均安装在所述单框架上并且所述陀螺转子通过所述陀螺转子驱动电机驱动其旋转。本发明的控制力矩陀螺群能够提供连续光滑的输出力矩,这满足了航行中对敏捷性和精确性的要求,并且能

一种水下航行器.pdf
本发明涉及水下航行领域,尤其涉及一种水下航行器,其包括椭球形外壳、水流喷射装置、转向装置、链轮链条传动装置、水流喷射角度控制装置、重物挂钩、造氧装置和观察窗;所述重物挂钩平衡所述水下航行器的浮力;所述椭球形外壳在所述水流喷射装置的驱动下,向前或向后移动;所述水流喷射装置在所述水流喷射角度控制装置的控制下,驱动所述椭球形外壳向上或向下移动。该水下航行器对海底地形适应能力强、噪音低、造价低、节能、运动灵活。
一种水下航行器.pdf
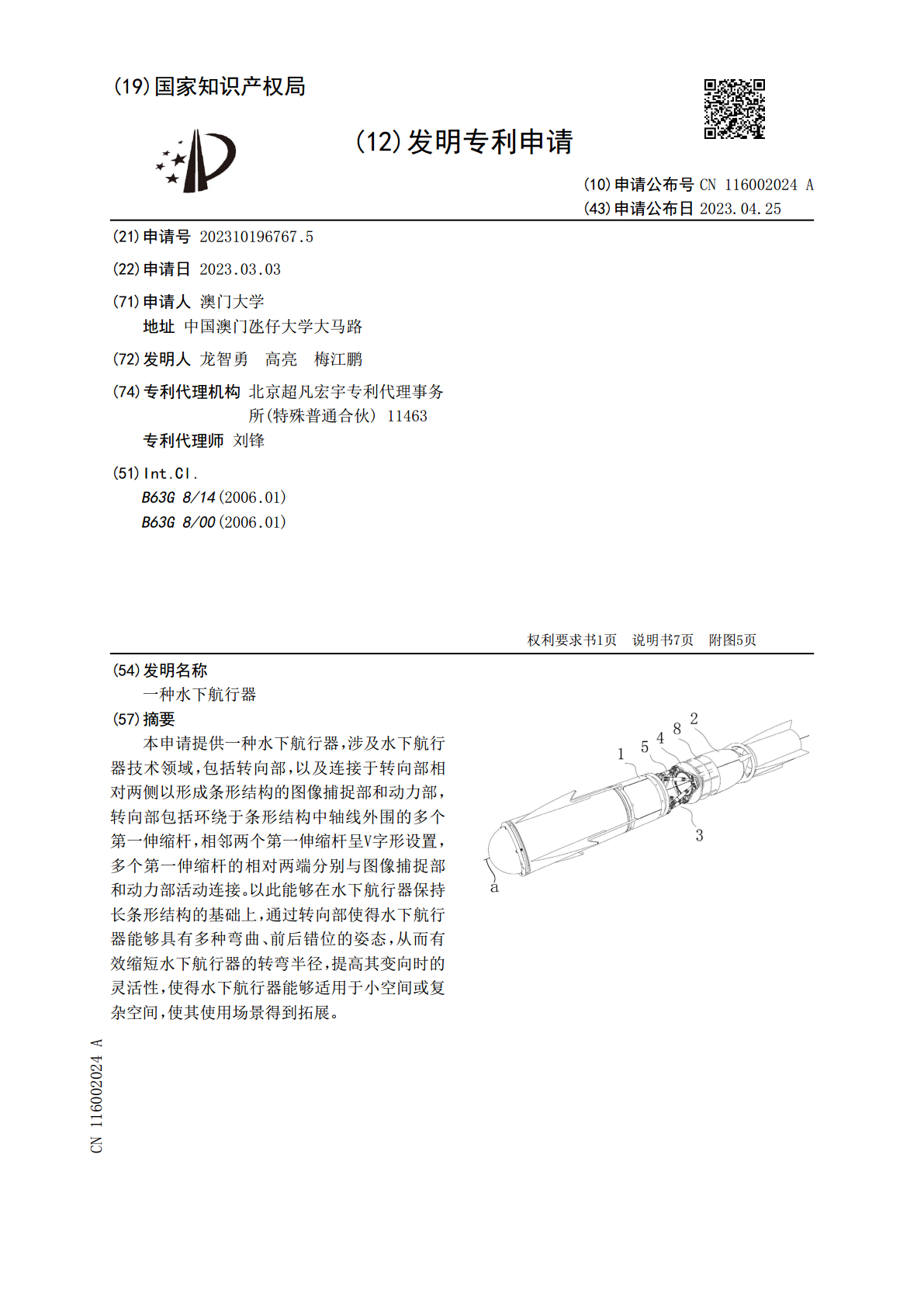
本申请提供一种水下航行器,涉及水下航行器技术领域,包括转向部,以及连接于转向部相对两侧以形成条形结构的图像捕捉部和动力部,转向部包括环绕于条形结构中轴线外围的多个第一伸缩杆,相邻两个第一伸缩杆呈V字形设置,多个第一伸缩杆的相对两端分别与图像捕捉部和动力部活动连接。以此能够在水下航行器保持长条形结构的基础上,通过转向部使得水下航行器能够具有多种弯曲、前后错位的姿态,从而有效缩短水下航行器的转弯半径,提高其变向时的灵活性,使得水下航行器能够适用于小空间或复杂空间,使其使用场景得到拓展。
一种水下航行器用大开角头部构型及水下航行器.pdf
本发明实施例提供一种水下航行器用大开角头部构型及水下航行器,所述头部构型为左右对称、上下非对称结构,其从轴线方向上,包括:头部球面段、中部圆柱段、曲面过渡段和后部圆柱段。头部球面段为半径为R2的半球结构,中部圆柱段的半径与头部球面段半径相同。中部圆柱段的回转轴线与后部圆柱段的回转轴线同位于对称平面。曲面过渡段包括N个角度截面曲线,以中部圆柱段的回转轴为参考,各截面间的夹角为θ,各角度截面在圆周方向呈均匀分布,θ=180/N。所述各角度截面曲线在对应角度截面上的投影为控制点构造的B样条。本发明技术方案,能够

一种水下航行器尾舵.pdf
本发明公开了一种水下航行器尾舵,包括壳体、舵机、舵机安装板、尾翼板、舵板轴、舵板、伞齿轮、舵机轴;所述壳体内等距一体式设有三个舵机耳板和三个舵轴耳板、外侧设有三个舵台,舵台内部设有舵轴耳板;所述舵机耳板上螺接有舵机安装板,所述舵机安装板上设有三组舵机;所述舵台和舵板伞齿轮外端装配有襟翼舵;所述舵机伞齿轮与舵板伞齿轮相互啮合传动;本发明采用三轴舵机尾舵布置方式,节约成本,提高了系统可靠性;简化了控制模型,降低了控制难度;结构紧凑、稳定性高;舵板采用襟翼结构提高了舵效和水下机器人的姿态控制能力;降低了电磁干扰