
一种三维B型超声成像方法与装置.pdf

波峻****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种三维B型超声成像方法与装置.pdf
一种三维B型超声成像装置,包括激光定位系统、陀螺仪和B型超声装置,B超探头上安装的陀螺仪,激光定位系统为脉冲激光测距仪,脉冲激光测距仪通过对四个角和中心点发射激光共五个定位监测点的监测;利用体元模型法,将三维物体划分为依次排列的小立方体,一个小立方体就是一个体元;在每个检测点上下垂直运动到不同的检测点,则至不同的体元的检测,直到不同的体元构成一个检测区域的三维图像。一定数目的体元按相应的空间位置排列即可构成三维立体图像,可以实现B超任意平面重建,方便诊断。

一种三维超声成像的方法及装置.pdf
本发明实施例公开了一种三维超声成像的方法及装置,包括:向成像目标区域发射超声波并接收超声回波,获得成像目标区域的三维体数据;从三维体数据中提取羊水区域;在提取的羊水区域中生成至少一个曲面,且胎儿区域位于所述曲面的内侧;去除位于该曲面外侧的三维体数据,获得更新的三维体数据;对该更新的三维体数据进行三维可视化绘制。通过在羊水区域中生成曲面且使得胎儿区域位于曲面的内侧,然后去除三维体数据中位于该曲面外侧的体数据,可以在三维体数据中去除胎盘区域和子宫壁区域,对剩下的三维体数据进行三维可视化绘制,即可获得不受胎盘和

超声三维成像方法和装置.pdf
本申请提供了一种超声三维成像方法和装置,该方法通过控制超声探头向目标组织发射至少一组体发散波;接收从目标组织返回的超声回波,获得至少三组超声回波信号;对至少三组超声回波信号进行信号处理,得到与至少三个不同的发射角度或者至少三个不同的接收角度对应的至少三个不同方向的速度分量;对至少三个不同方向的速度分量进行矢量合成,得到目标组织的三维向量速度。本申请采用预设排列组合的阵元向目标组织发射体发散波,体发散波的扫描区域大,得到的图像覆盖范围大,帧率也较高,且采用体发散波也可以同时完成不同的线或面的扫描,避免在测量
一种三维超声渲染成像方法及装置.pdf
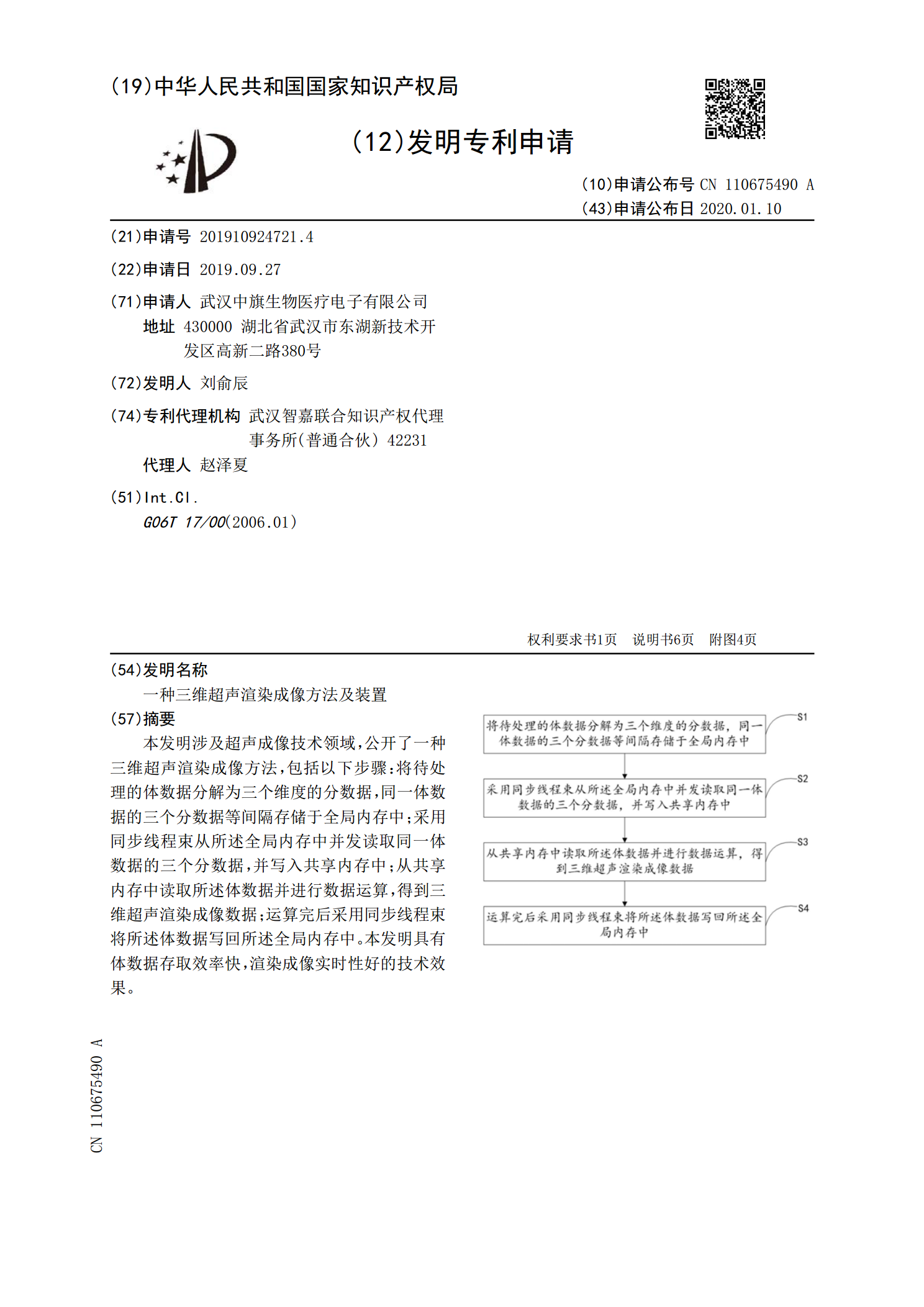
本发明涉及超声成像技术领域,公开了一种三维超声渲染成像方法,包括以下步骤:将待处理的体数据分解为三个维度的分数据,同一体数据的三个分数据等间隔存储于全局内存中;采用同步线程束从所述全局内存中并发读取同一体数据的三个分数据,并写入共享内存中;从共享内存中读取所述体数据并进行数据运算,得到三维超声渲染成像数据;运算完后采用同步线程束将所述体数据写回所述全局内存中。本发明具有体数据存取效率快,渲染成像实时性好的技术效果。
一种超声成像装置和方法、超声弹性检测装置和方法.pdf
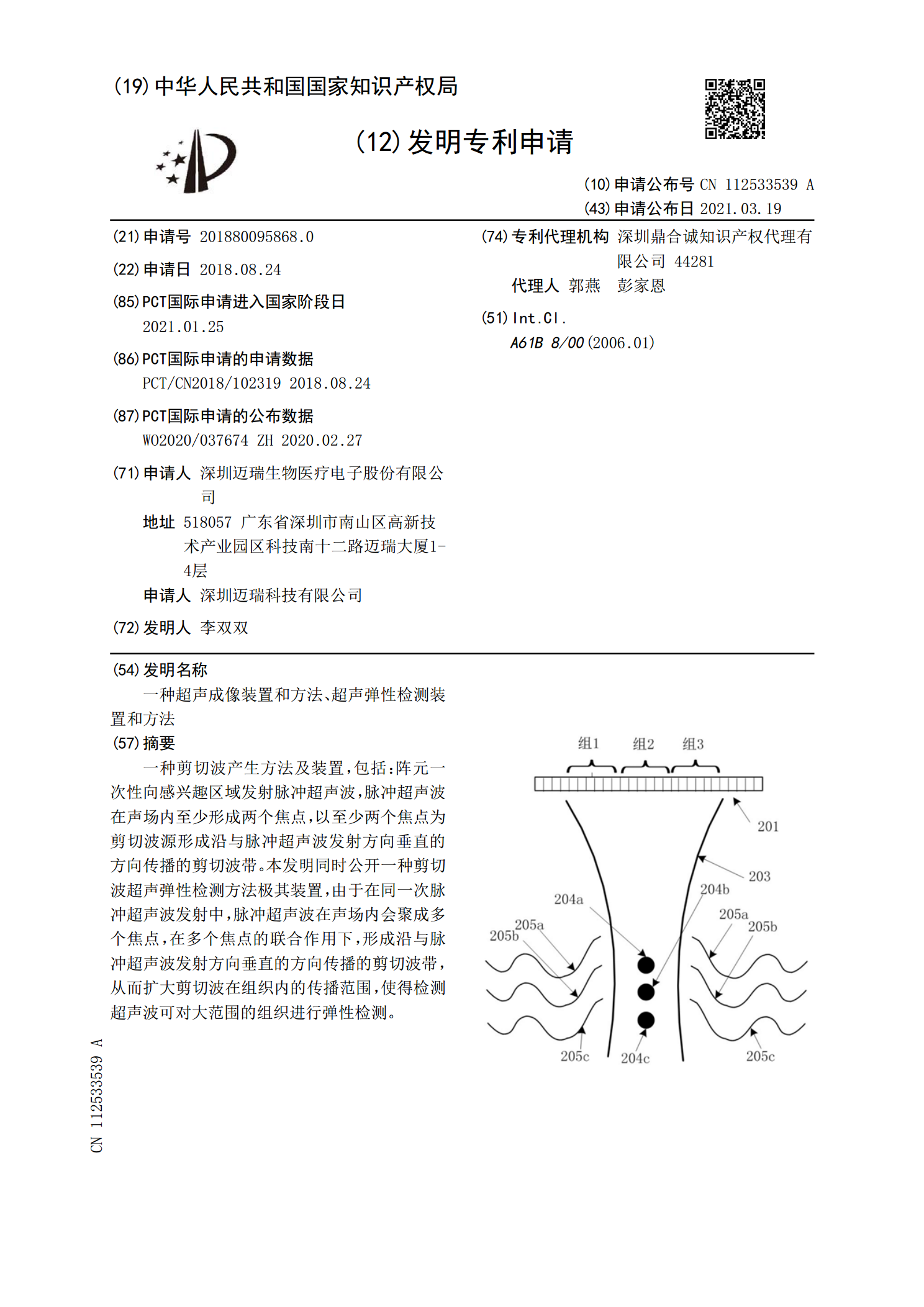
一种剪切波产生方法及装置,包括:阵元一次性向感兴趣区域发射脉冲超声波,脉冲超声波在声场内至少形成两个焦点,以至少两个焦点为剪切波源形成沿与脉冲超声波发射方向垂直的方向传播的剪切波带。本发明同时公开一种剪切波超声弹性检测方法极其装置,由于在同一次脉冲超声波发射中,脉冲超声波在声场内会聚成多个焦点,在多个焦点的联合作用下,形成沿与脉冲超声波发射方向垂直的方向传播的剪切波带,从而扩大剪切波在组织内的传播范围,使得检测超声波可对大范围的组织进行弹性检测。