
一种采用视线角虚拟目标复合的飞行器光电导引着舰方法.pdf

St****12

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种采用视线角虚拟目标复合的飞行器光电导引着舰方法.pdf
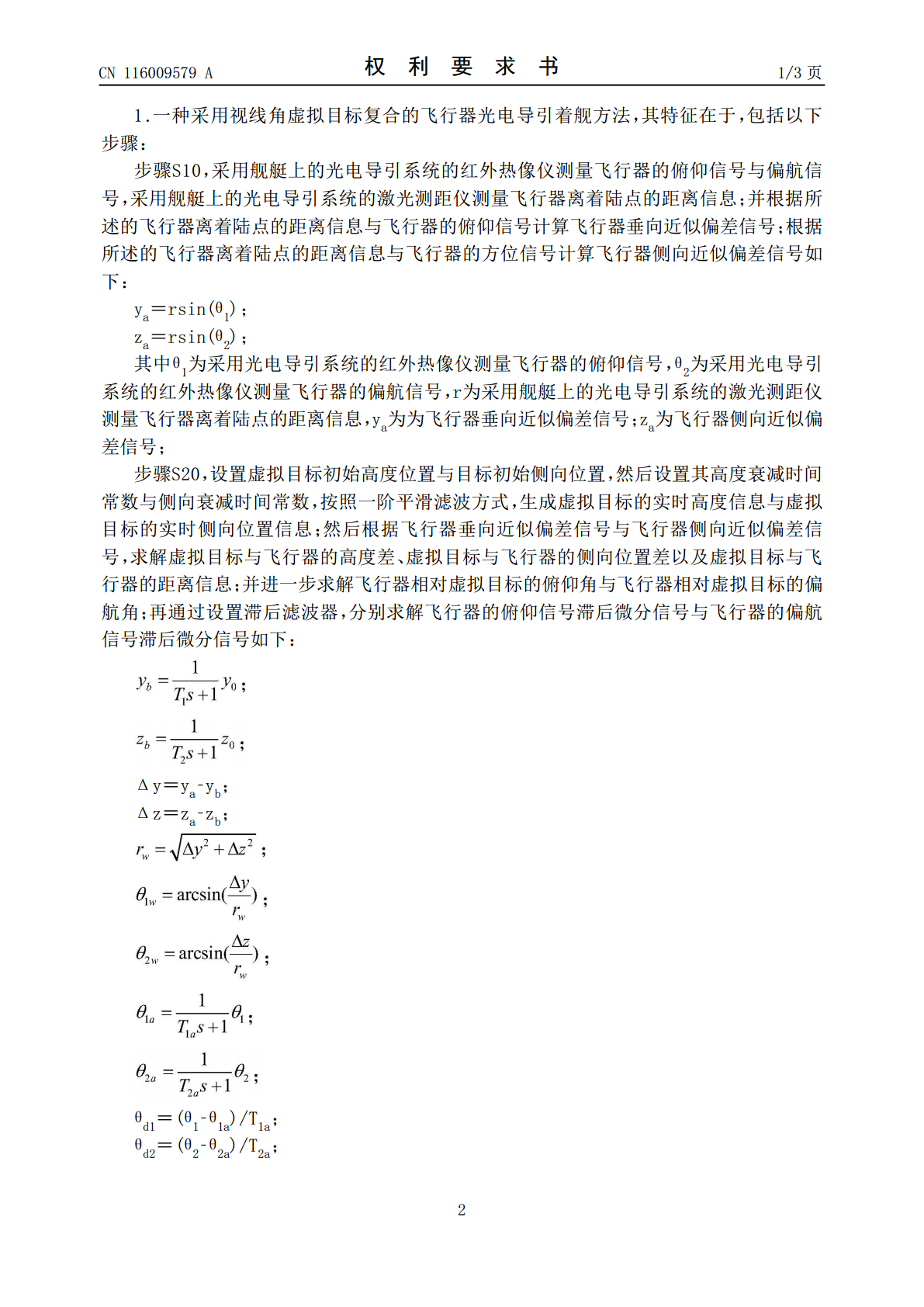
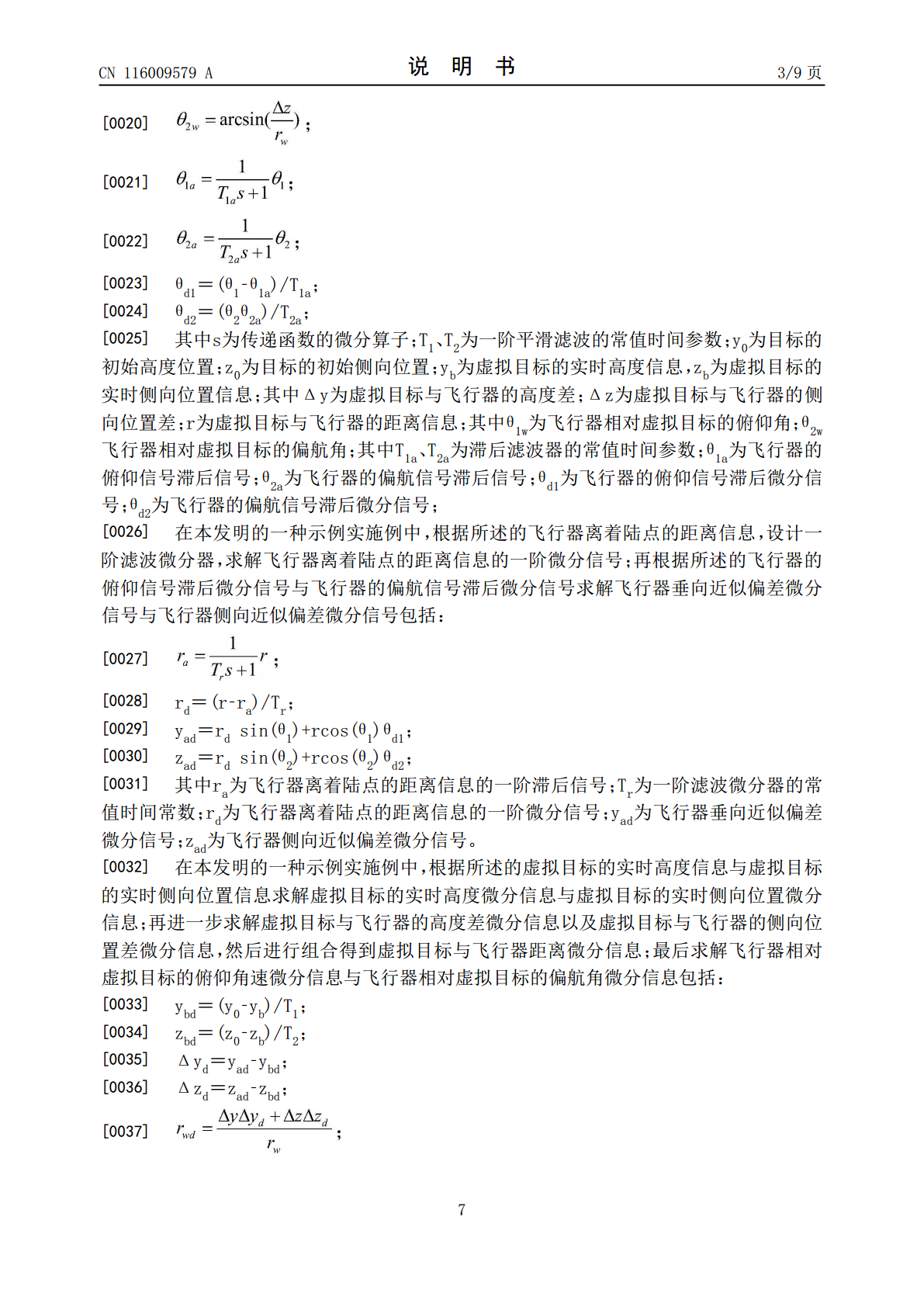
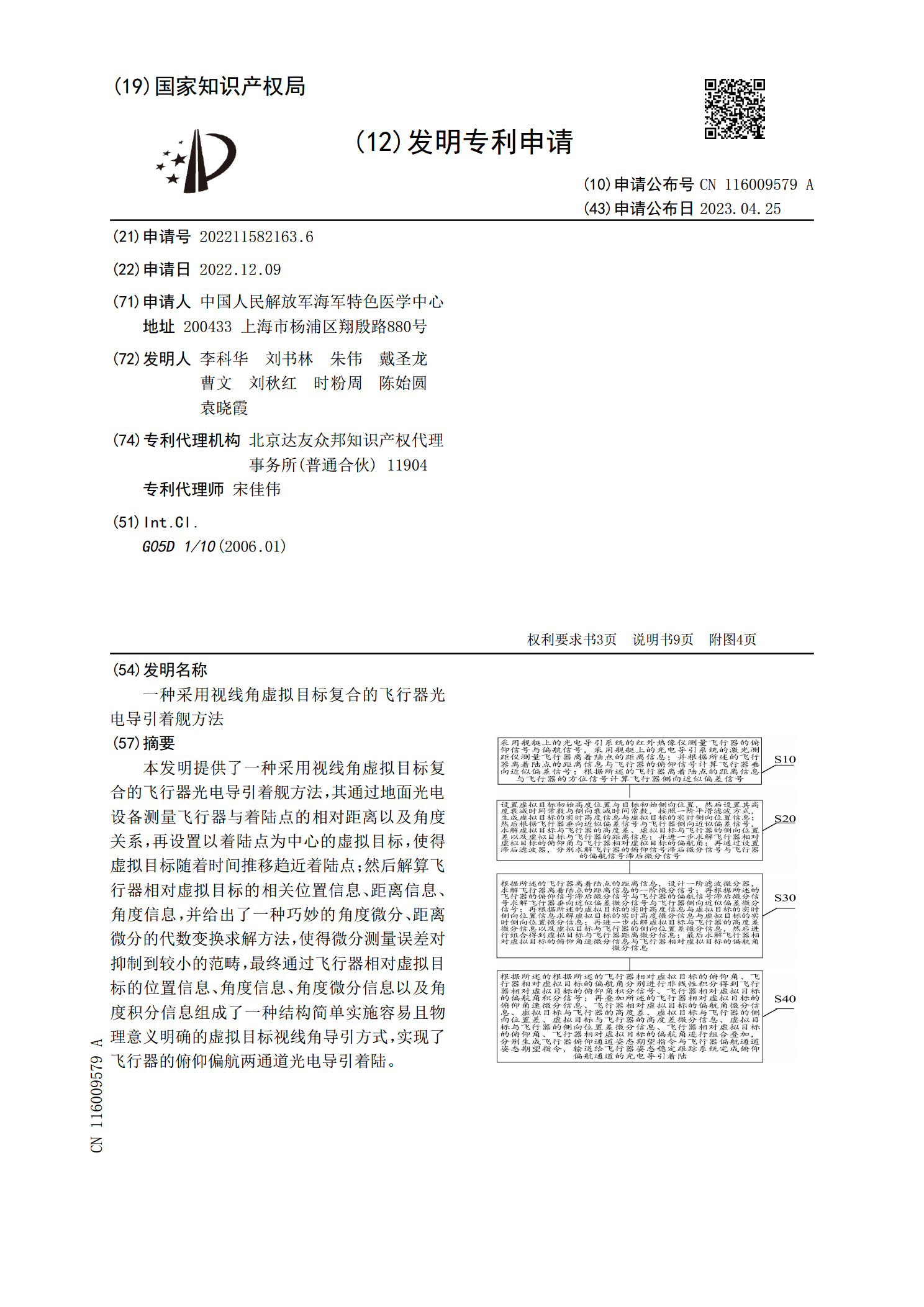
本发明提供了一种采用视线角虚拟目标复合的飞行器光电导引着舰方法,其通过地面光电设备测量飞行器与着陆点的相对距离以及角度关系,再设置以着陆点为中心的虚拟目标,使得虚拟目标随着时间推移趋近着陆点;然后解算飞行器相对虚拟目标的相关位置信息、距离信息、角度信息,并给出了一种巧妙的角度微分、距离微分的代数变换求解方法,使得微分测量误差对抑制到较小的范畴,最终通过飞行器相对虚拟目标的位置信息、角度信息、角度微分信息以及角度积分信息组成了一种结构简单实施容易且物理意义明确的虚拟目标视线角导引方式,实现了飞行器的俯仰偏航

一种基于双通道耦合的飞行器光电导引着舰方法.pdf
本发明是关于采用双通道耦合方式的光电制导飞行器着舰导引方法,其提供了一种通过光电导引系统的红外热像仪与激光测距仪来测量飞行器的俯仰方位与距离信息并解算垂向与侧向近似偏差信号;同时采用惯性微分混合、积分并组合飞行器俯仰偏航角速率的方式得到俯仰方位综合信号,再设计自适应规律,对俯仰与方位通道的直接干扰进行补偿估计;并构造俯仰方位的线性控制信号;再针对双通道之间的耦合,采用自适应的方法设计俯仰方位铰链干扰补偿信号,并融合俯仰方位的铰链综合反馈信息,实现了飞行器的光电导引着舰艇。该方案对俯仰偏航通道耦合严重的飞行
一种岸舰光电复合电力电缆连接头.pdf
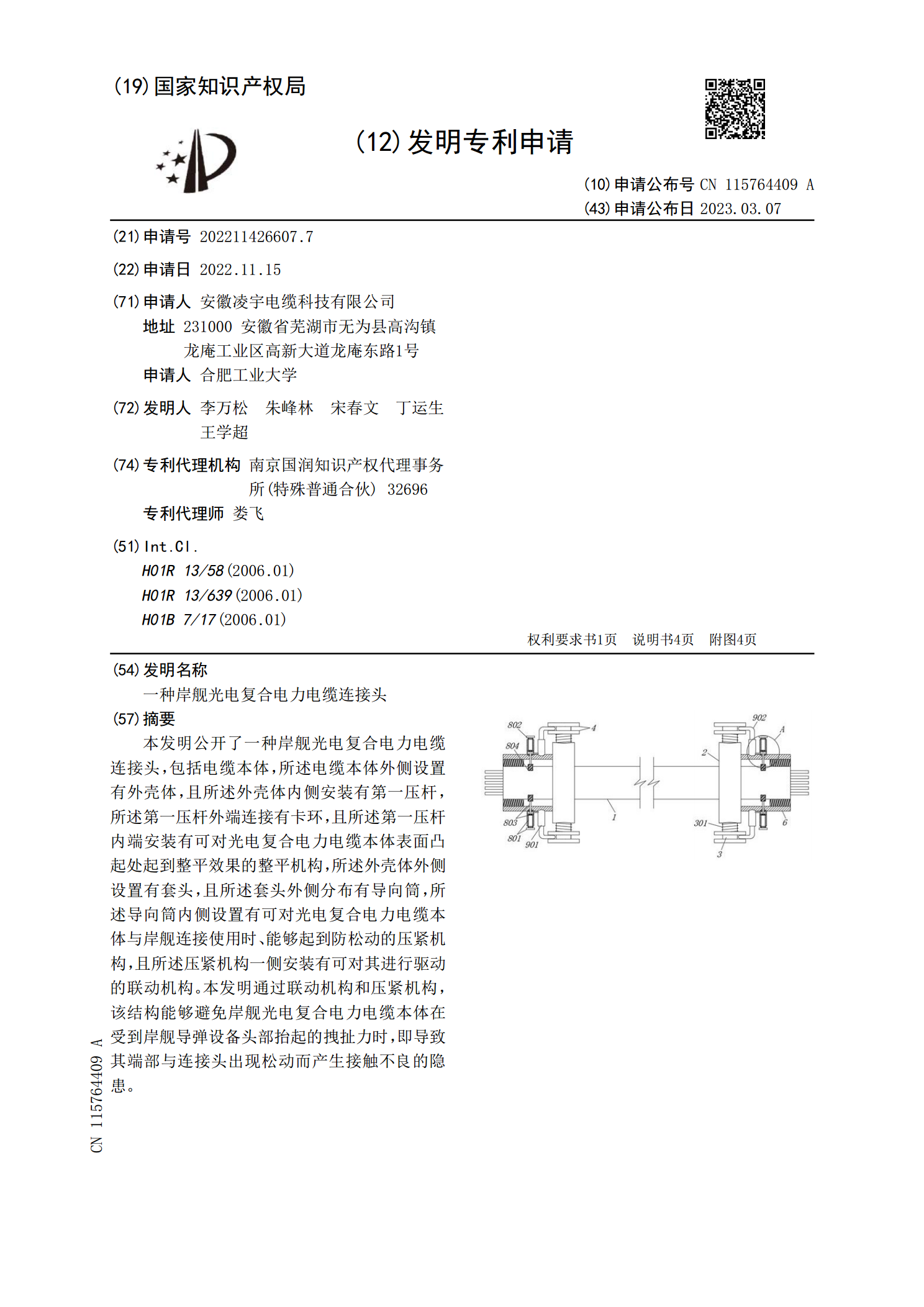
本发明公开了一种岸舰光电复合电力电缆连接头,包括电缆本体,所述电缆本体外侧设置有外壳体,且所述外壳体内侧安装有第一压杆,所述第一压杆外端连接有卡环,且所述第一压杆内端安装有可对光电复合电力电缆本体表面凸起处起到整平效果的整平机构,所述外壳体外侧设置有套头,且所述套头外侧分布有导向筒,所述导向筒内侧设置有可对光电复合电力电缆本体与岸舰连接使用时、能够起到防松动的压紧机构,且所述压紧机构一侧安装有可对其进行驱动的联动机构。本发明通过联动机构和压紧机构,该结构能够避免岸舰光电复合电力电缆本体在受到岸舰导弹设备头

一种光电经纬仪虚拟目标仿真方法研究.docx
一种光电经纬仪虚拟目标仿真方法研究近年来,随着技术的不断发展和应用领域的不断拓展,光电经纬仪的应用范围也逐渐扩大。光电经纬仪是一种高精度的测量仪器,在航空、制图、地理测量等领域都有着重要的作用。然而,由于实际测量环境的复杂性,比如天气条件、地面地形等因素的干扰,使得光电经纬仪在实际应用中难以达到理想的测量精度。因此,在光电经纬仪的设计中,虚拟目标仿真方法被广泛应用。虚拟目标仿真技术是一种将实际目标进行数字化处理,在计算机内进行虚拟仿真的技术,它能够在不受外界环境影响的情况下,模拟出理想的测量目标,为光电经
一种周视光电观瞄设备的复合式旋转动密封结构.pdf
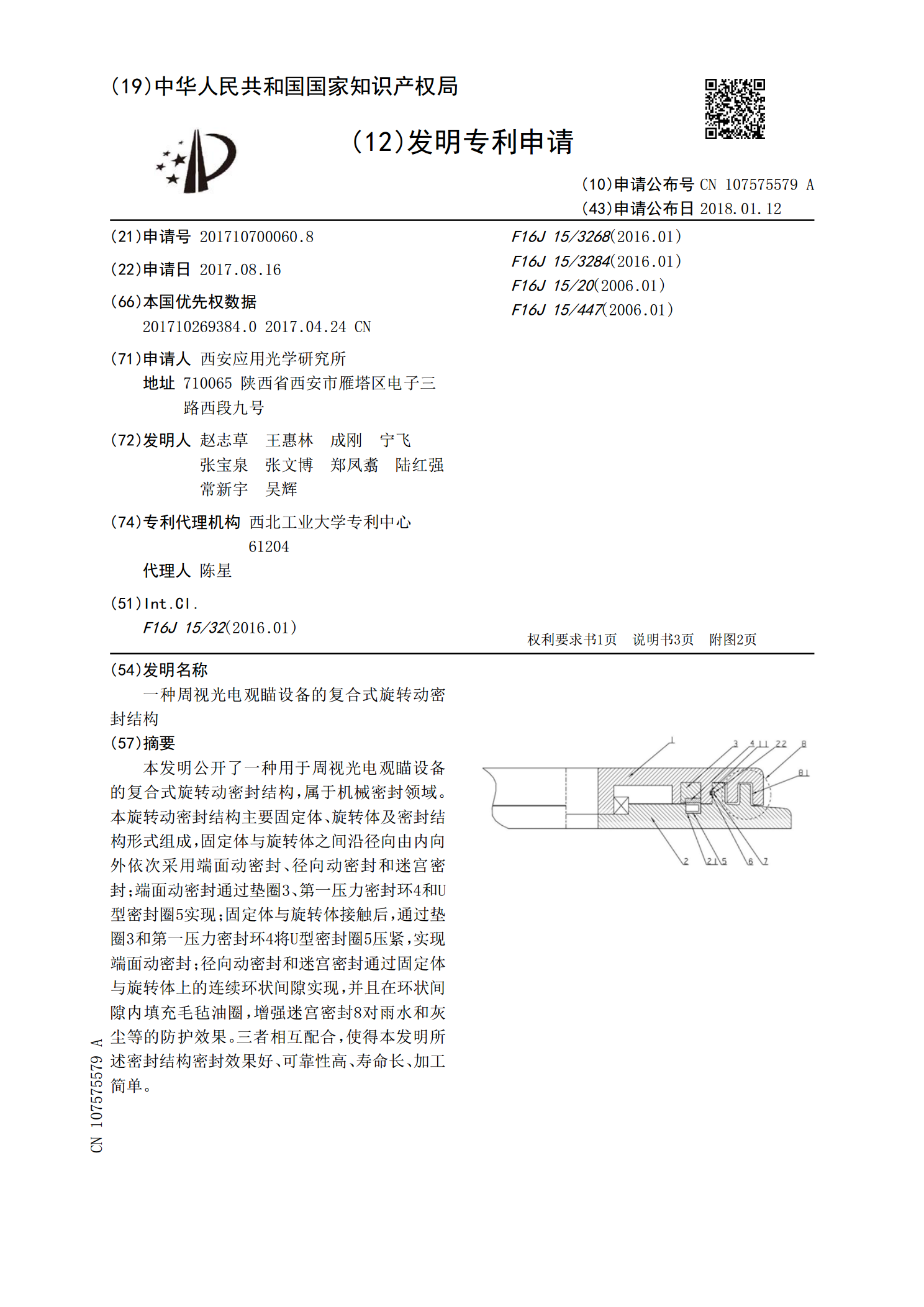
本发明公开了一种用于周视光电观瞄设备的复合式旋转动密封结构,属于机械密封领域。本旋转动密封结构主要固定体、旋转体及密封结构形式组成,固定体与旋转体之间沿径向由内向外依次采用端面动密封、径向动密封和迷宫密封;端面动密封通过垫圈3、第一压力密封环4和U型密封圈5实现;固定体与旋转体接触后,通过垫圈3和第一压力密封环4将U型密封圈5压紧,实现端面动密封;径向动密封和迷宫密封通过固定体与旋转体上的连续环状间隙实现,并且在环状间隙内填充毛毡油圈,增强迷宫密封8对雨水和灰尘等的防护效果。三者相互配合,使得本发明所述密