
一种高精度智能分选设备.pdf

森林****来了


1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高精度智能分选设备.pdf
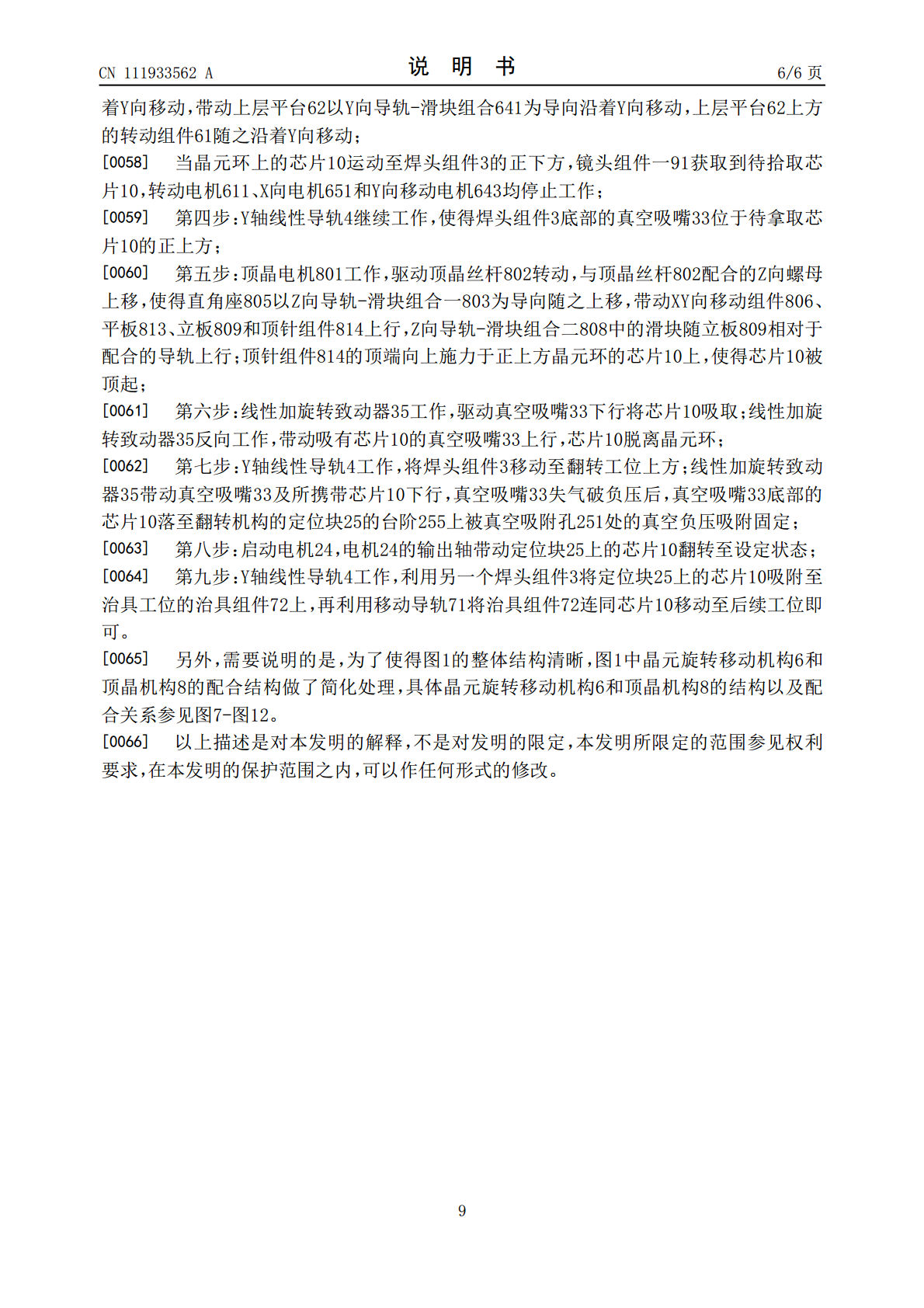
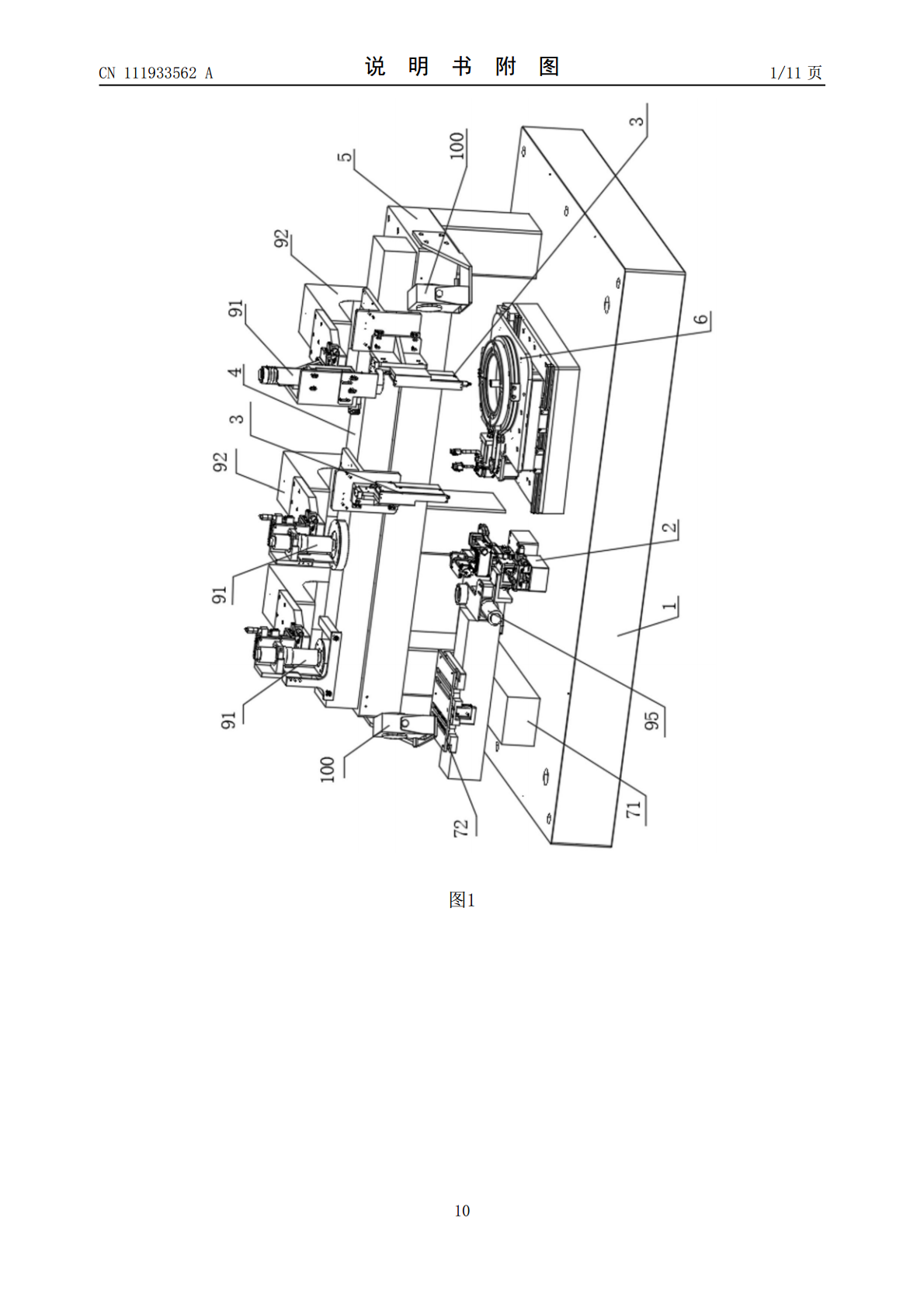
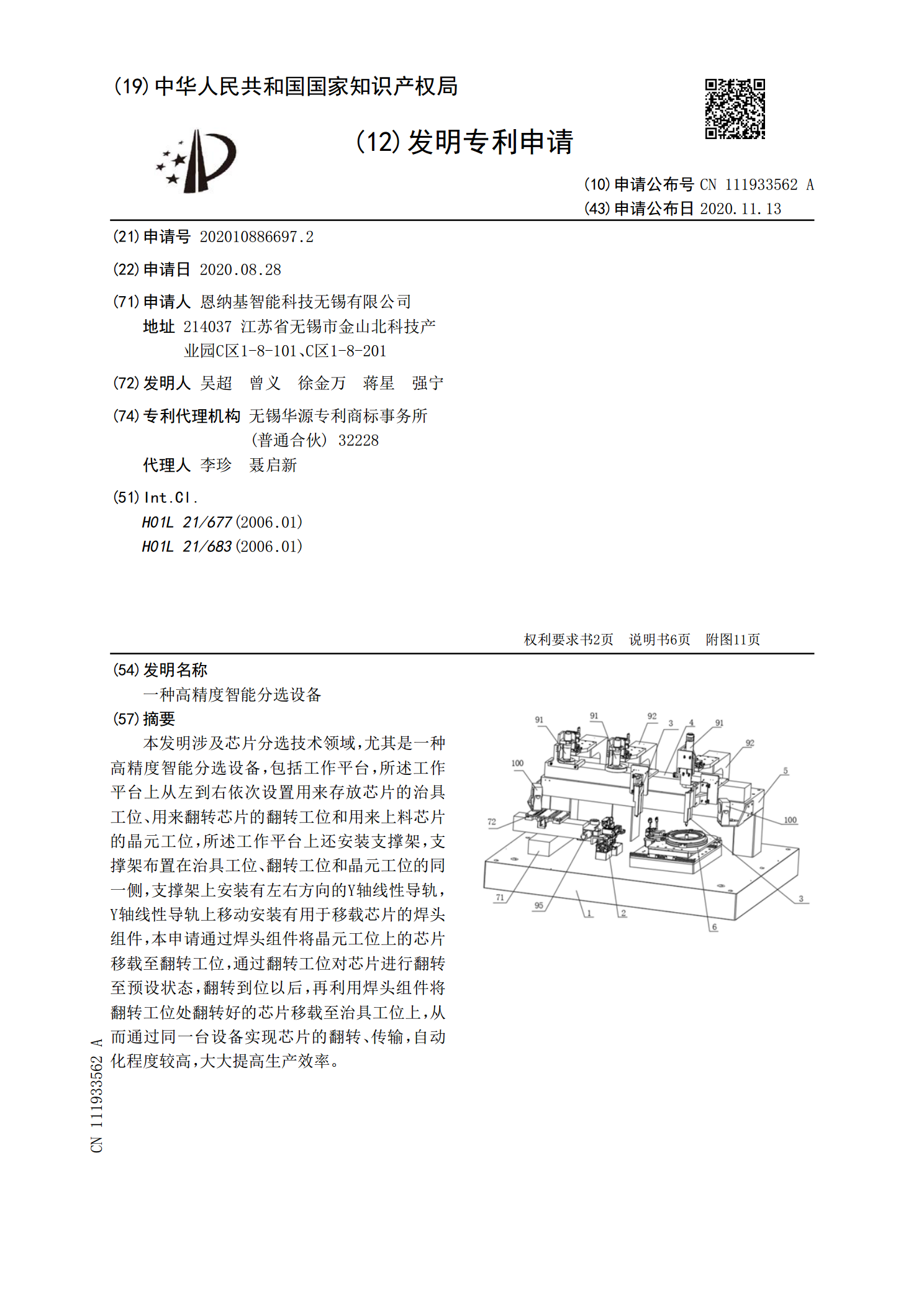
本发明涉及芯片分选技术领域,尤其是一种高精度智能分选设备,包括工作平台,所述工作平台上从左到右依次设置用来存放芯片的治具工位、用来翻转芯片的翻转工位和用来上料芯片的晶元工位,所述工作平台上还安装支撑架,支撑架布置在治具工位、翻转工位和晶元工位的同一侧,支撑架上安装有左右方向的Y轴线性导轨,Y轴线性导轨上移动安装有用于移载芯片的焊头组件,本申请通过焊头组件将晶元工位上的芯片移载至翻转工位,通过翻转工位对芯片进行翻转至预设状态,翻转到位以后,再利用焊头组件将翻转工位处翻转好的芯片移载至治具工位上,从而通过同一
种苗智能分选设备及分选方法.pdf
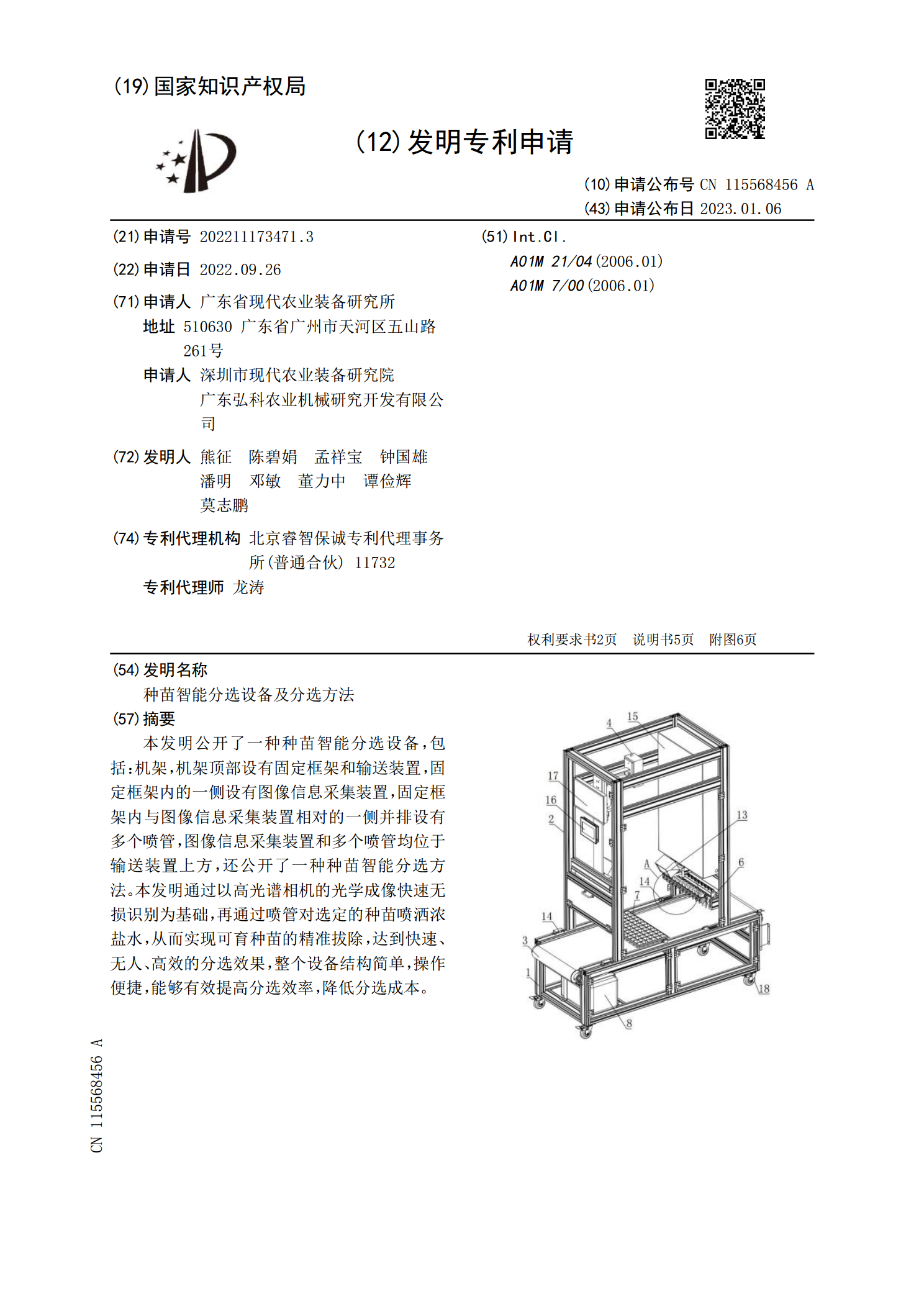
本发明公开了一种种苗智能分选设备,包括:机架,机架顶部设有固定框架和输送装置,固定框架内的一侧设有图像信息采集装置,固定框架内与图像信息采集装置相对的一侧并排设有多个喷管,图像信息采集装置和多个喷管均位于输送装置上方,还公开了一种种苗智能分选方法。本发明通过以高光谱相机的光学成像快速无损识别为基础,再通过喷管对选定的种苗喷洒浓盐水,从而实现可育种苗的精准拔除,达到快速、无人、高效的分选效果,整个设备结构简单,操作便捷,能够有效提高分选效率,降低分选成本。

一种物流件智能高效分选设备.pdf
本发明公开了一种物流件智能高效分选设备,其结构包括弹压机构、套环、底座、感应器、支撑杆,弹压机构通过套环安装在感应器上,感应器和支撑杆连接在底座上,在助力体上设有旋摆件和卡位结构,利用旋摆件和卡位结构在侧移板上的相配合,当橡胶兜承接住快递较重一侧后,将会沿该快递四周在变形限位框内变形,推动限位框按压旋摆件在卡位结构上发散扩展,不仅托举限位框反向调整橡胶兜上的划痕,改变橡胶兜的抻拉幅度,还使得卡位结构能借力于侧移板,在固定座上左右控制滚轴调整补足托盘至垂直居中位置,提高该装置对快递分选的灵活性。

一种车规芯片测试分选智能设备.pdf
本发明公开了一种车规芯片测试分选智能设备,包括:上料机组,用于将芯片上料至第一中转机构上;测试分选机组,用于将第一中转机构上的芯片依次进行测试和分选;下料机组,依据所述测试分选机组的分选结果对芯片进行下料。通过上料机组的多种上料方式实现对芯片的自动上料,然后通过测试分选机组对芯片依次进行测试,并且可根据每个芯片的测试结果对其进行分选,最后下料机组依据分选结果进行自动下料;实现对芯片从上料、测试、分选以及下料的全自动化流程,实现了在芯片封装前提前对其进行测试,分选出不良芯片或将芯片进行等级分选,满足高密度多

一种AI智能高精度制备纯水设备.pdf
本实用新型涉及制备纯水设备技术领域,且公开了一种AI智能高精度制备纯水设备,包括原水管、蒸汽管和废水管,所述原水管的右侧固定连接有数量为两个的原水泵,两个所述原水泵的右侧均固定连接有加压管,两个所述加压管之间连通有连接管,两个所述加压管的外侧均固定连接有电动控制阀,两个所述加压管的右侧均固定连接有数量为两个且相连通的清洗机构,两个所述清洗机构与石英砂罐的上下两侧连通。该AI智能高精度制备纯水设备,具备纯净水电导率稳定等优点,解决了现有的水处理设备就达不到要求,或者不稳定,酸碱清洗一下只管两三天,需要平凡的