
一种可自动升降的管道潜望镜.pdf

是翠****ng

1/10

2/10

3/10

4/10

5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可自动升降的管道潜望镜.pdf
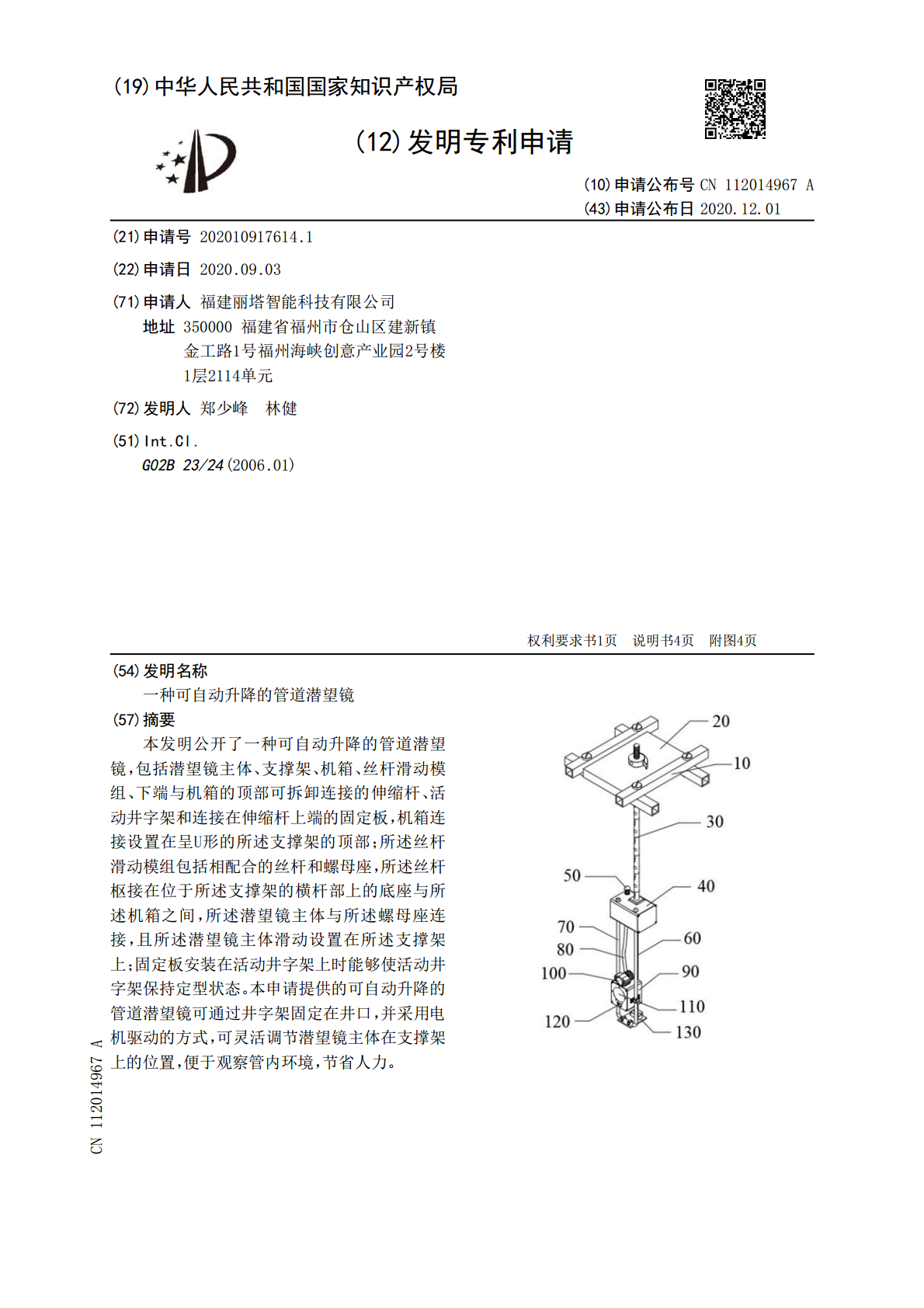
本发明公开了一种可自动升降的管道潜望镜,包括潜望镜主体、支撑架、机箱、丝杆滑动模组、下端与机箱的顶部可拆卸连接的伸缩杆、活动井字架和连接在伸缩杆上端的固定板,机箱连接设置在呈U形的所述支撑架的顶部;所述丝杆滑动模组包括相配合的丝杆和螺母座,所述丝杆枢接在位于所述支撑架的横杆部上的底座与所述机箱之间,所述潜望镜主体与所述螺母座连接,且所述潜望镜主体滑动设置在所述支撑架上;固定板安装在活动井字架上时能够使活动井字架保持定型状态。本申请提供的可自动升降的管道潜望镜可通过井字架固定在井口,并采用电机驱动的方式,可
一种可自动升降的拐杖.pdf
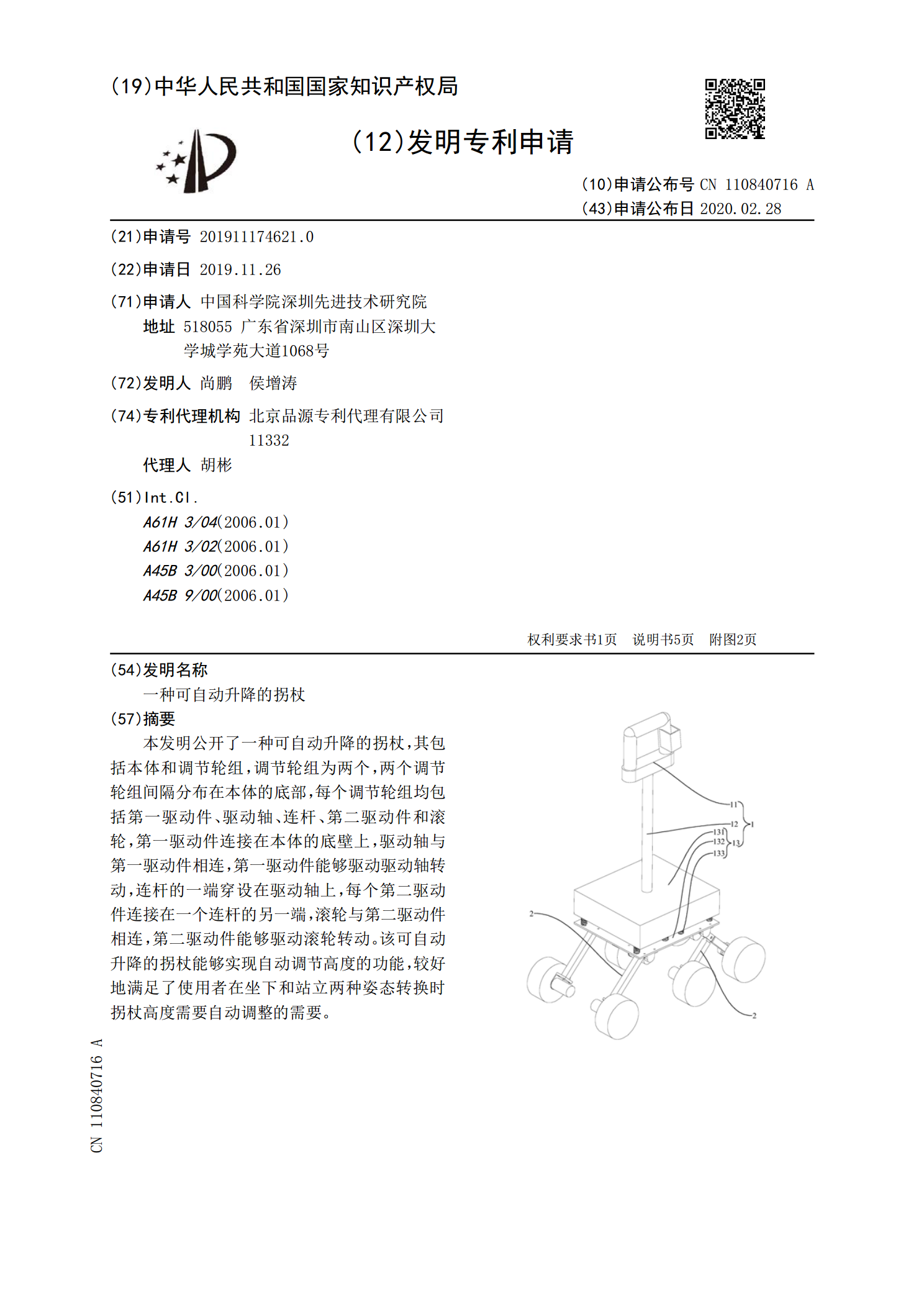
本发明公开了一种可自动升降的拐杖,其包括本体和调节轮组,调节轮组为两个,两个调节轮组间隔分布在本体的底部,每个调节轮组均包括第一驱动件、驱动轴、连杆、第二驱动件和滚轮,第一驱动件连接在本体的底壁上,驱动轴与第一驱动件相连,第一驱动件能够驱动驱动轴转动,连杆的一端穿设在驱动轴上,每个第二驱动件连接在一个连杆的另一端,滚轮与第二驱动件相连,第二驱动件能够驱动滚轮转动。该可自动升降的拐杖能够实现自动调节高度的功能,较好地满足了使用者在坐下和站立两种姿态转换时拐杖高度需要自动调整的需要。
一种管道检测潜望镜.pdf
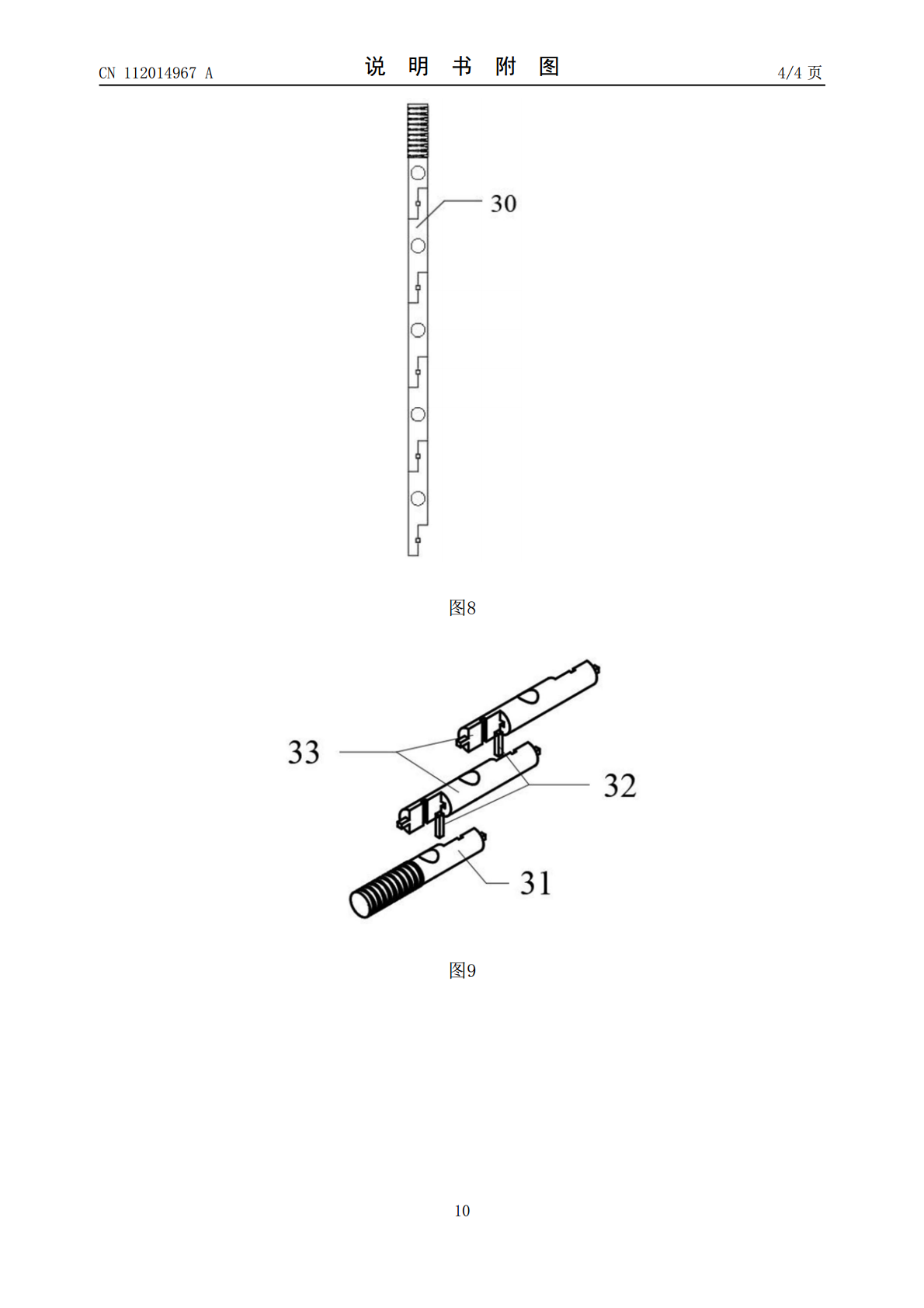
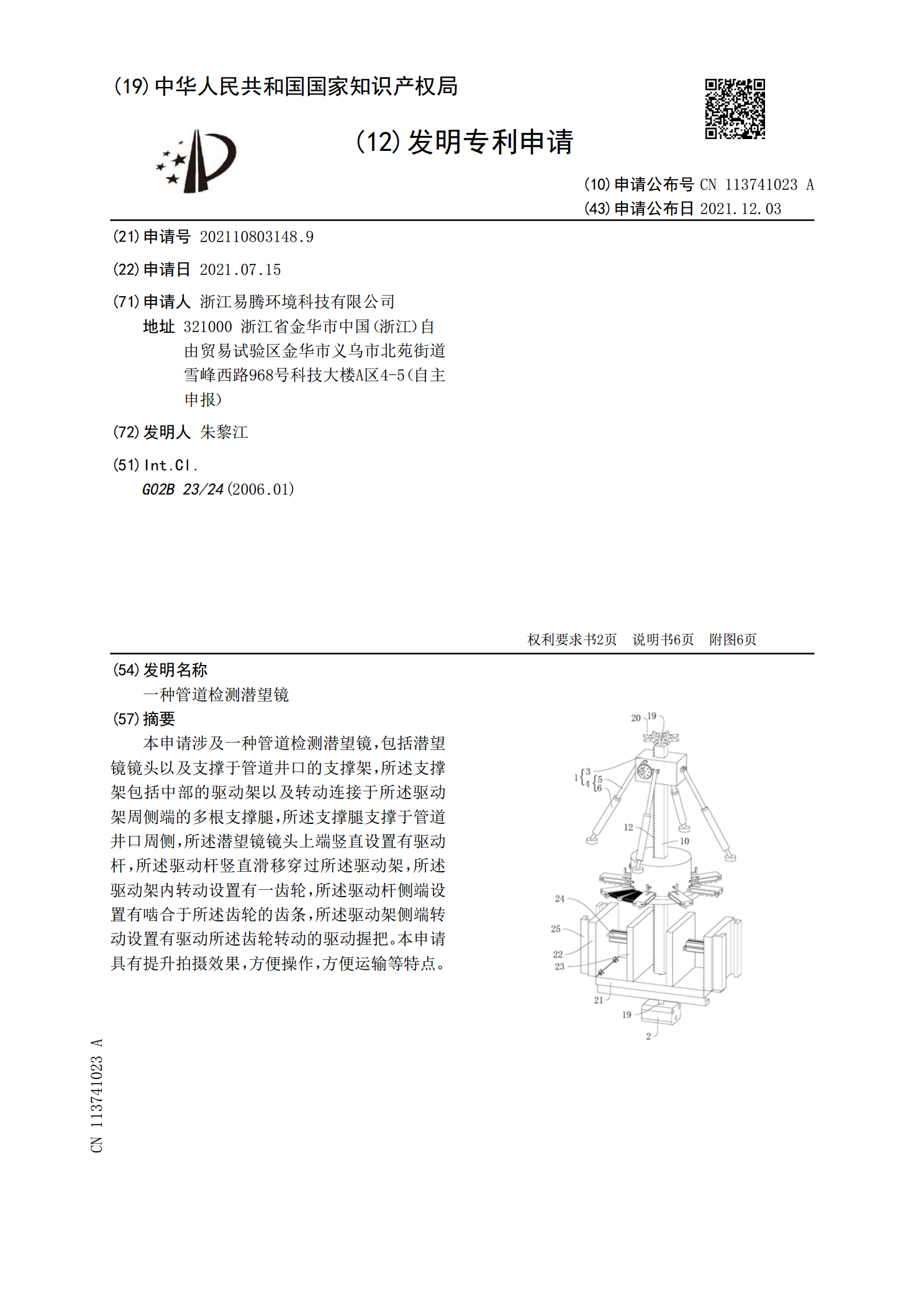
本申请涉及一种管道检测潜望镜,包括潜望镜镜头以及支撑于管道井口的支撑架,所述支撑架包括中部的驱动架以及转动连接于所述驱动架周侧端的多根支撑腿,所述支撑腿支撑于管道井口周侧,所述潜望镜镜头上端竖直设置有驱动杆,所述驱动杆竖直滑移穿过所述驱动架,所述驱动架内转动设置有一齿轮,所述驱动杆侧端设置有啮合于所述齿轮的齿条,所述驱动架侧端转动设置有驱动所述齿轮转动的驱动握把。本申请具有提升拍摄效果,方便操作,方便运输等特点。
一种可自动升降电烤箱.pdf
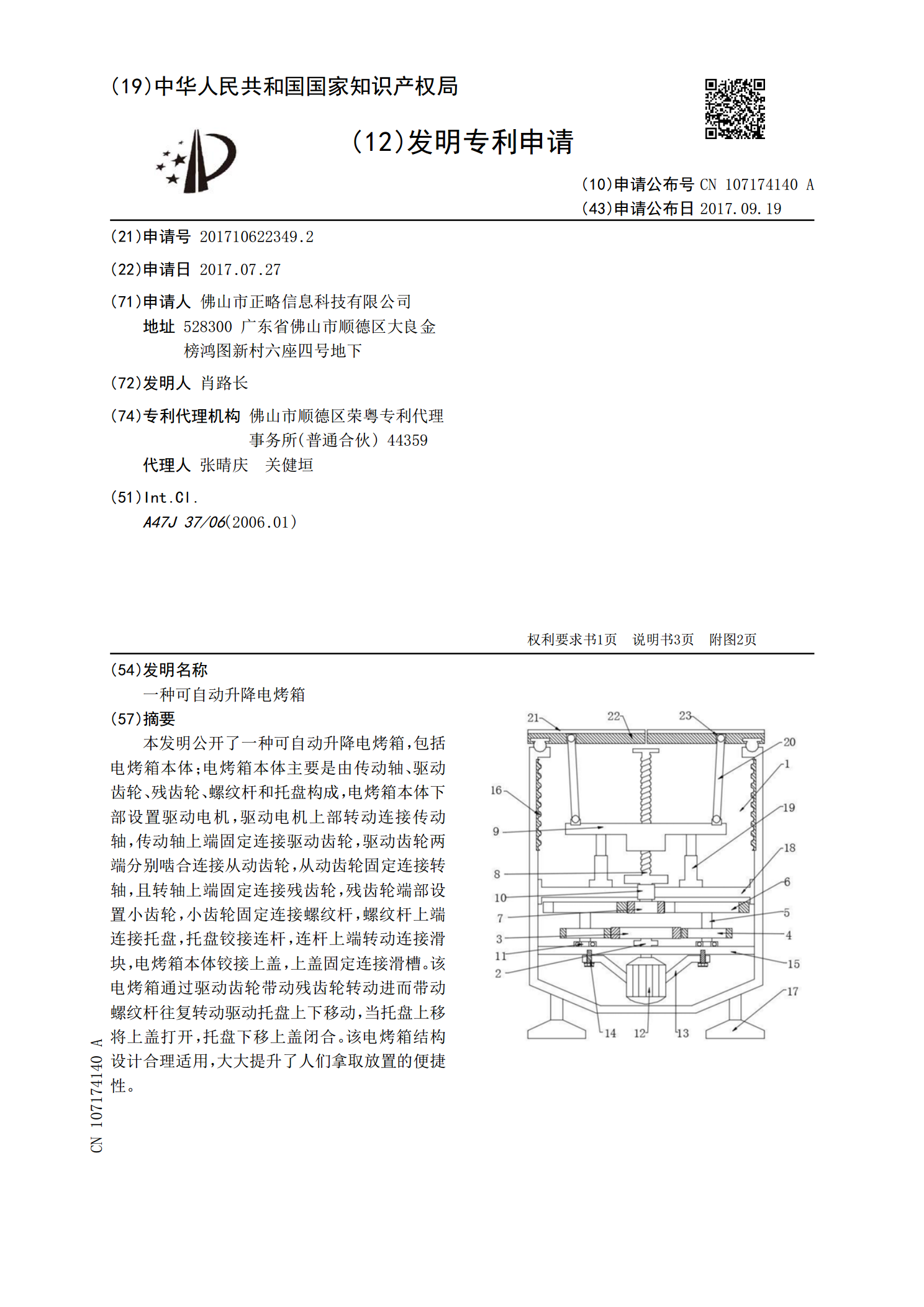
本发明公开了一种可自动升降电烤箱,包括电烤箱本体;电烤箱本体主要是由传动轴、驱动齿轮、残齿轮、螺纹杆和托盘构成,电烤箱本体下部设置驱动电机,驱动电机上部转动连接传动轴,传动轴上端固定连接驱动齿轮,驱动齿轮两端分别啮合连接从动齿轮,从动齿轮固定连接转轴,且转轴上端固定连接残齿轮,残齿轮端部设置小齿轮,小齿轮固定连接螺纹杆,螺纹杆上端连接托盘,托盘铰接连杆,连杆上端转动连接滑块,电烤箱本体铰接上盖,上盖固定连接滑槽。该电烤箱通过驱动齿轮带动残齿轮转动进而带动螺纹杆往复转动驱动托盘上下移动,当托盘上移将上盖打开
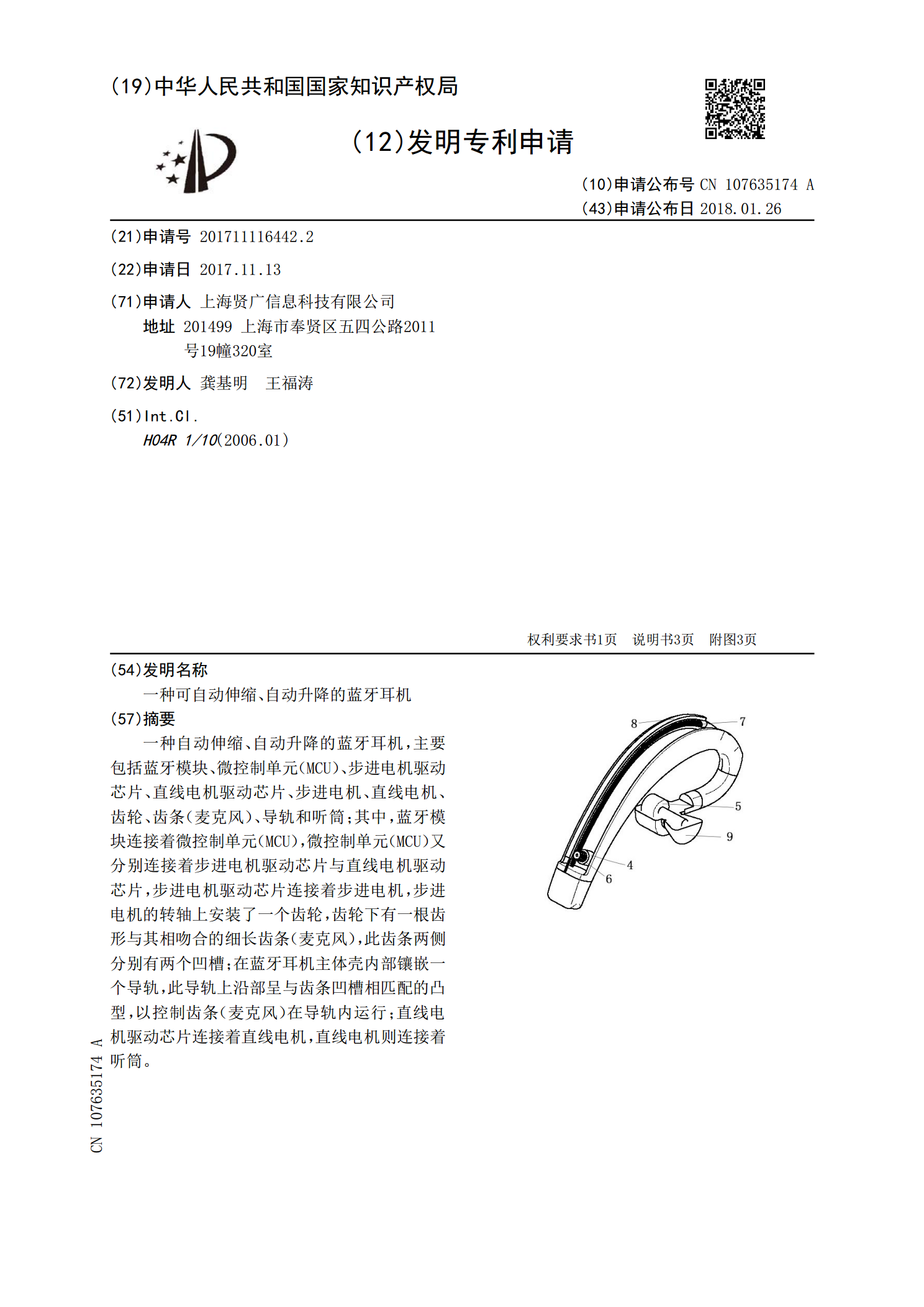
一种可自动伸缩、自动升降的蓝牙耳机.pdf
一种自动伸缩、自动升降的蓝牙耳机,主要包括蓝牙模块、微控制单元(MCU)、步进电机驱动芯片、直线电机驱动芯片、步进电机、直线电机、齿轮、齿条(麦克风)、导轨和听筒;其中,蓝牙模块连接着微控制单元(MCU),微控制单元(MCU)又分别连接着步进电机驱动芯片与直线电机驱动芯片,步进电机驱动芯片连接着步进电机,步进电机的转轴上安装了一个齿轮,齿轮下有一根齿形与其相吻合的细长齿条(麦克风),此齿条两侧分别有两个凹槽;在蓝牙耳机主体壳内部镶嵌一个导轨,此导轨上沿部呈与齿条凹槽相匹配的凸型,以控制齿条(麦克风)在导轨