
水面垃圾自动清理机器人.pdf

雨巷****轶丽

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
水面垃圾自动清理机器人.pdf
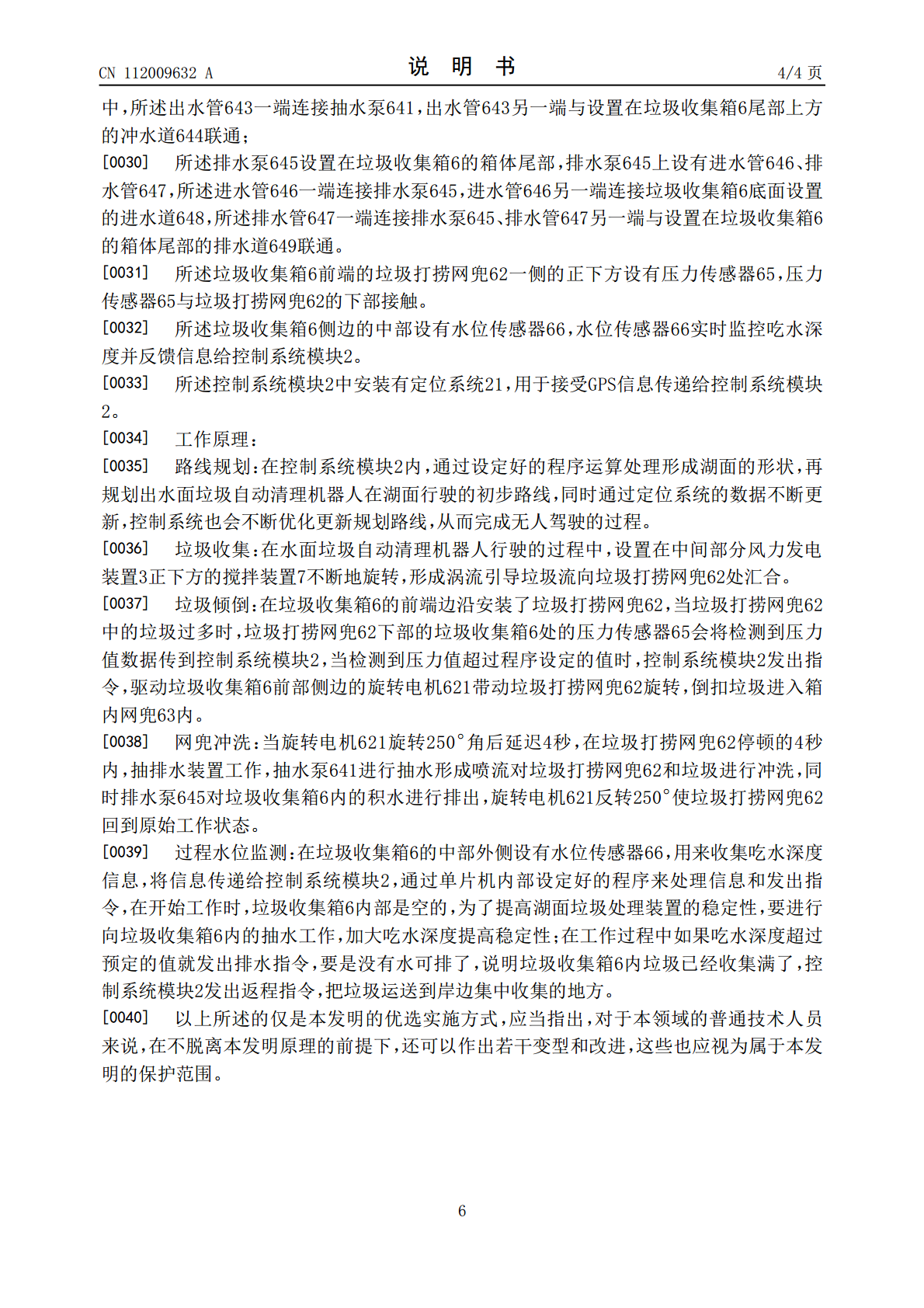
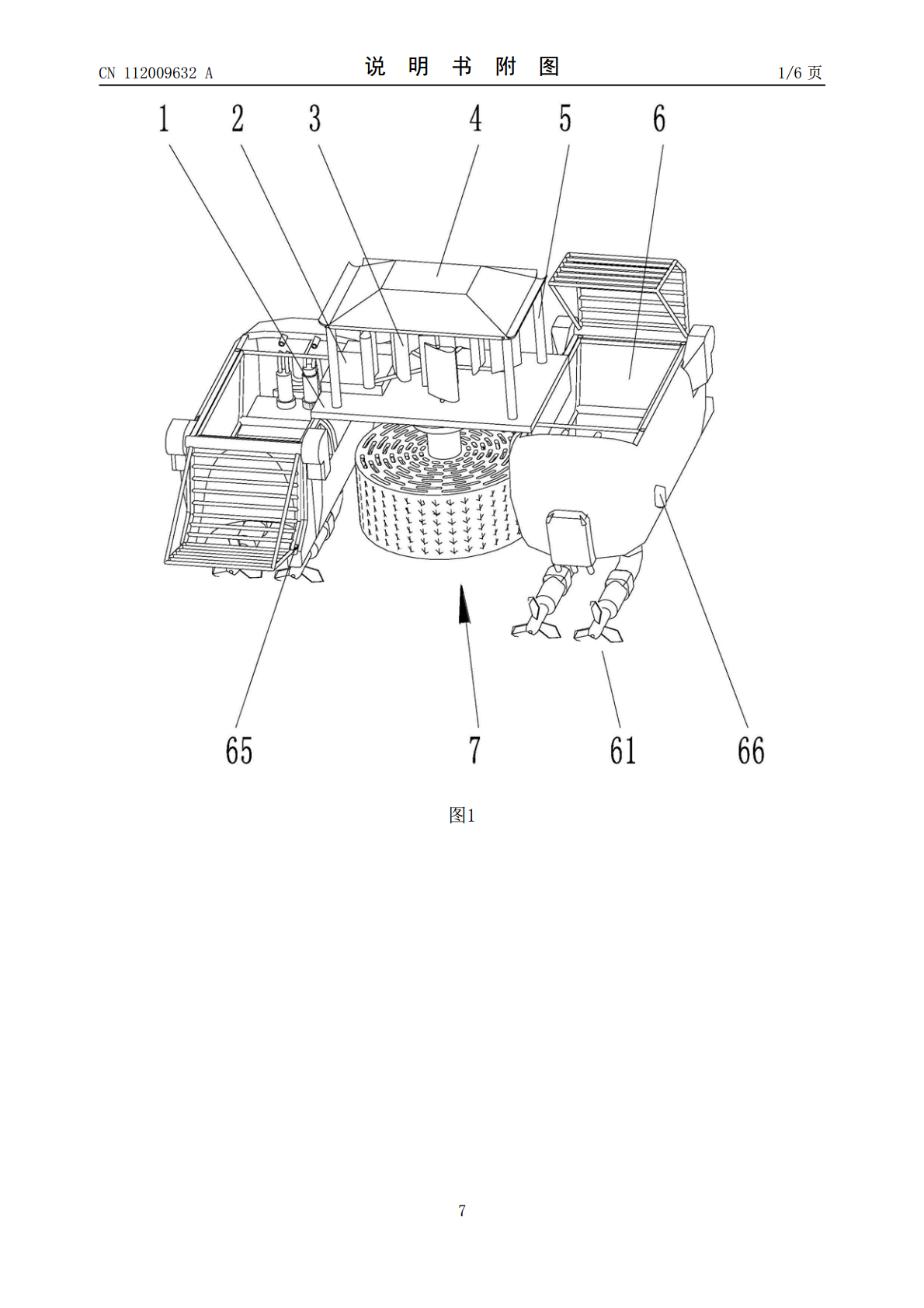
本发明涉及水面垃圾自动清理机器人,包括连接板、控制系统模块、风力发电装置、支撑架、太阳能发电装置、搅拌装置和垃圾收集箱,所述搅拌装置包括驱动电机、驱动蜗杆、驱动齿轮、搅拌器轴、搅拌头和搅拌器防护罩,所述垃圾收集箱包括舵机装置、垃圾打捞网兜、箱内网兜、抽排水装置、压力传感器和水位传感器,所述控制系统模块中设有定位系统。本发明的有益效果是:整体结构简单实用,实现了智能化的水面垃圾清扫,兼有自动打捞、收集处理、无人驾驶、太阳能发电、风力发电、流体力学、机械原理等技术于一体的自动打捞垃圾处理装置,该装置大大节省了
水面垃圾自动清理船.pdf
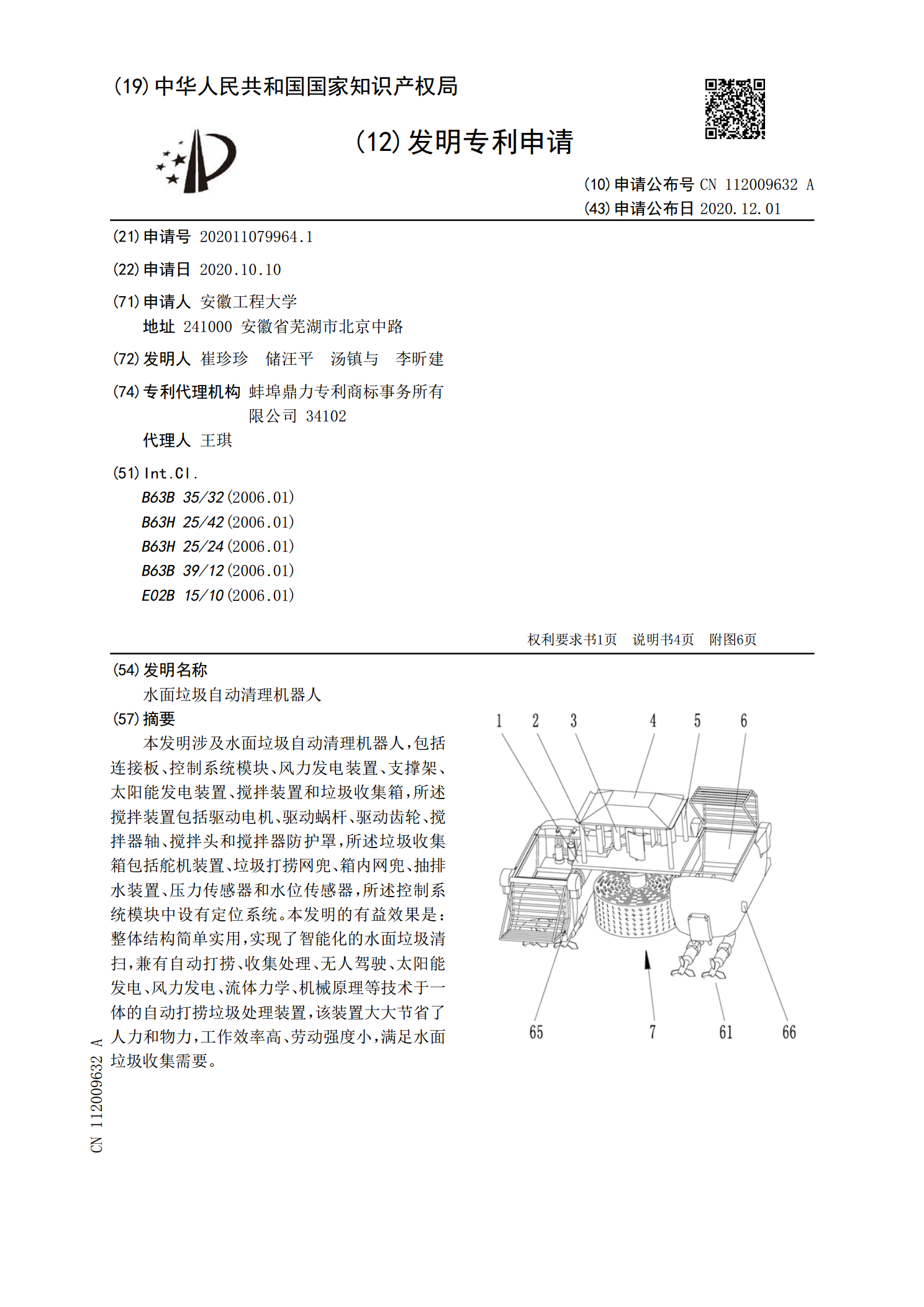
本发明提供一种水面垃圾自动清理船,用于解决现有技术中水面垃圾清理效率低下的问题。包括船体、收集装置和转运装置,船体在向前运动时,第一驱动件驱动转动横杆转动,进而带动左摆板与右摆板沿着相反方向转动,摆板的开合,将水面的垃圾向底板聚拢,此时第二驱动件驱动链条转动,带动与链条刚性连接的支撑杆沿着圆形滑槽转动,从而驱动了固套在支撑杆上的整个收集装置转动,第一驱动件的转动中心与两个圆形滑槽的中心同轴,使得第一传动件始终对摆板输出转动力,保证摆板底板处于接触状态,确保垃圾不会漏出,当收集装置沿着圆形滑槽转动到最左侧时
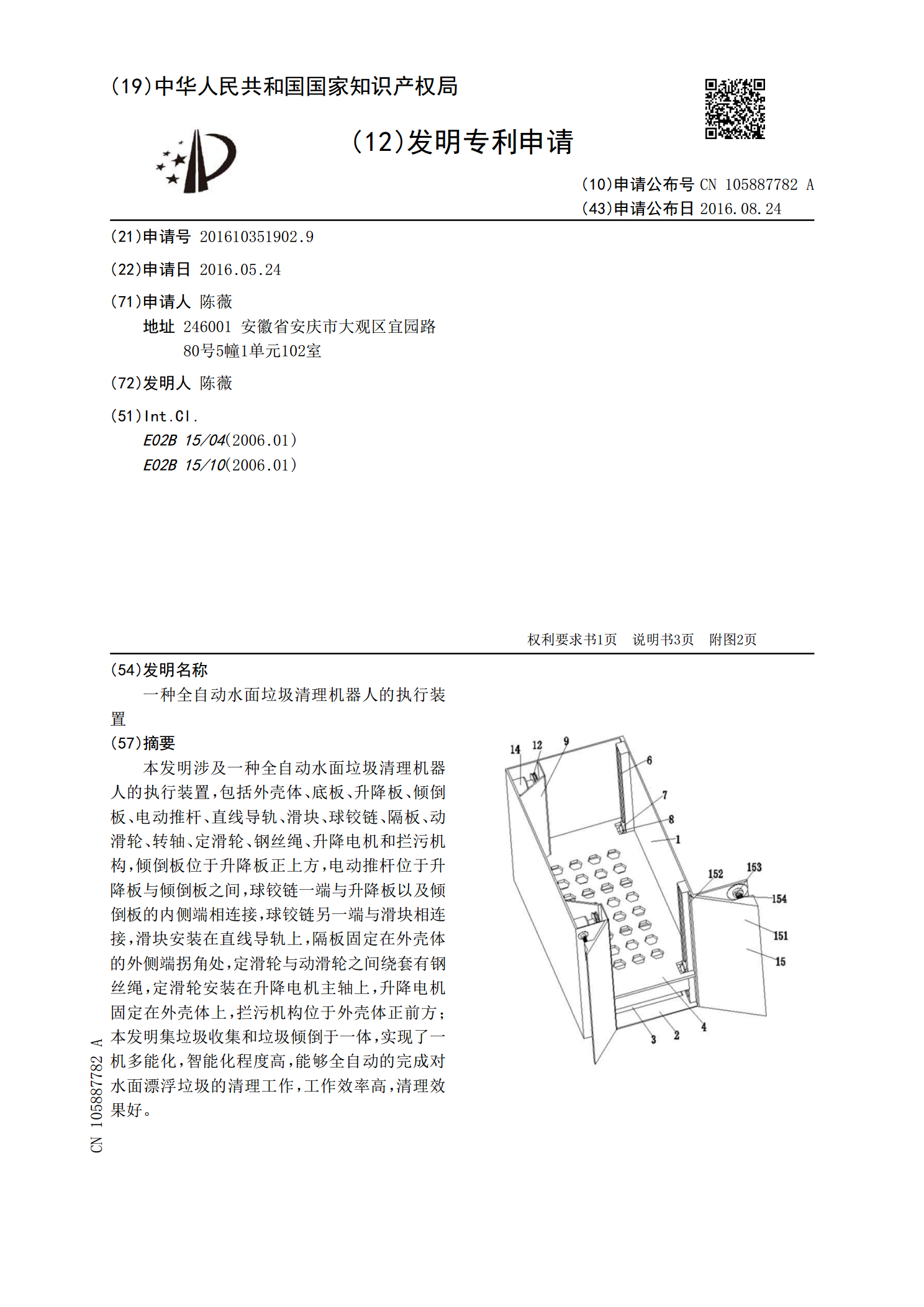
一种全自动水面垃圾清理机器人的执行装置.pdf
本发明涉及一种全自动水面垃圾清理机器人的执行装置,包括外壳体、底板、升降板、倾倒板、电动推杆、直线导轨、滑块、球铰链、隔板、动滑轮、转轴、定滑轮、钢丝绳、升降电机和拦污机构,倾倒板位于升降板正上方,电动推杆位于升降板与倾倒板之间,球铰链一端与升降板以及倾倒板的内侧端相连接,球铰链另一端与滑块相连接,滑块安装在直线导轨上,隔板固定在外壳体的外侧端拐角处,定滑轮与动滑轮之间绕套有钢丝绳,定滑轮安装在升降电机主轴上,升降电机固定在外壳体上,拦污机构位于外壳体正前方;本发明集垃圾收集和垃圾倾倒于一体,实现了一机多

一种自动清理水面垃圾的系统.pdf
一种自动清理水面垃圾的系统,属于环境保护领域,包括一种自动清理水面垃圾的装置和一种自动清理水面垃圾的方法,一种自动清理水面垃圾的装置是由超声波传感器、超声波传感器安装架、太阳能板、折叠大杆、小挡板、折叠小杆、大挡板、大挡板折叠大杆、大挡板折叠小杆、气囊、过滤网、船体、步进电机、电机传动板、传动杆、电机安装板、圆柱滚子轴承、滚珠、螺旋桨、控制器、电池和电机组成的,一种自动清理水面垃圾的方法使用自动清理水面垃圾的装置进行垃圾清理工作,该装置能够实时、不间断在公园湖面上进行垃圾清理工作,既减轻了公园工作人员的工

一种水面垃圾自动清理装置.pdf
本发明公开一种水面垃圾自动清理装置,包括外桶,外桶内部设有过滤桶,外桶底部中间开设有排水口,外桶底部固定安装机箱,机箱和外桶之间可拆卸安装过滤板,机箱底部固定安装底座,外桶外壁固定安装若干支撑杆,支撑杆远离外桶一端固定安装浮筒,机箱外壁固定安装安装架,安装架顶部铰接太阳能板,安装架上端表面固定安装控制盒。本发明水面垃圾自动清理装置通过浮筒提供浮力使装置在水面漂浮,通过PLC控制器控制第一电机定期转动带动收卷辊转动,使牵引绳收缩或拉伸,配合浮筒的排气和充气,使装置定时下潜和上浮,实现水面漂浮垃圾的自动清理。