
一种智能控制杀虫灯.pdf

小代****回来


1/10

2/10
3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能控制杀虫灯.pdf
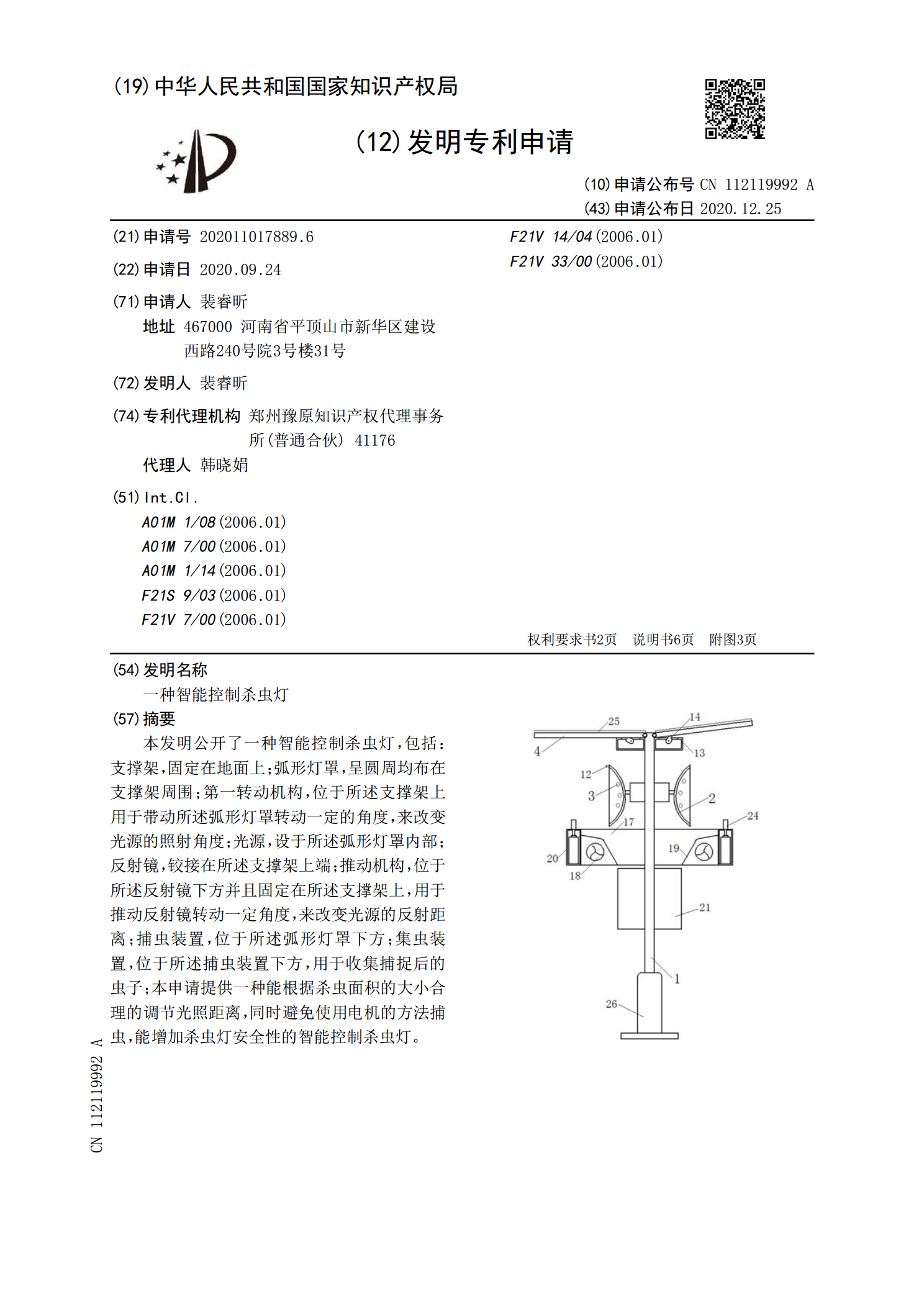
本发明公开了一种智能控制杀虫灯,包括:支撑架,固定在地面上;弧形灯罩,呈圆周均布在支撑架周围;第一转动机构,位于所述支撑架上用于带动所述弧形灯罩转动一定的角度,来改变光源的照射角度;光源,设于所述弧形灯罩内部;反射镜,铰接在所述支撑架上端;推动机构,位于所述反射镜下方并且固定在所述支撑架上,用于推动反射镜转动一定角度,来改变光源的反射距离;捕虫装置,位于所述弧形灯罩下方;集虫装置,位于所述捕虫装置下方,用于收集捕捉后的虫子;本申请提供一种能根据杀虫面积的大小合理的调节光照距离,同时避免使用电机的方法捕虫,

智能杀虫灯监控系统.pdf
本发明为一种智能杀虫灯监控系统。其包括:具有太阳能电池板的杀虫灯;设置于杀虫灯内的控制器,连接于控制器以采集该杀虫灯工作参数的感应器;感应器包括电流传感器、电压传感器和位置检测装置;电流传感器连接于控制器以采集该杀虫灯工作电流,电压传感器连接于控制器以采集该杀虫灯工作电压,位置检测装置的安装于收集装置上端,收集装置用以收集被杀虫灯杀死的昆虫,该位置检测装置的输出端连接控制器的输入端,连接于控制器用以传输工作参数的通信模块;与通信模块互联用以监控杀虫灯工作参数的中央控制计算机。本发明通过工作参数准确的监测各

一种智能光敏晶体管杀虫灯.pdf
本发明公开了一种智能光敏晶体管杀虫灯,包括太阳能电池板、光能发电机、支撑架、光敏控制器、支撑柱、支撑板、模型箱体、风扇转动叶片、高压电网、气味引诱剂、冲击板块、昆虫收集室、支承座、放大晶体管灯管、缩放晶体管灯管、木桩和蓄电池箱,本发明智能光敏晶体管杀虫灯,使用放大晶体管灯管、缩放晶体管灯管和气味引诱剂同时引诱昆虫。在一定程度上,利用晶体管的放大功能,遇到抗电能力较高的昆虫利用晶体管的性质将电能放大;遇到比较脆弱的昆虫可用小电流将其消灭,大大的节约了能量,对于周围环境较暗时能够提高亮度,吸引昆虫。又能在一定

一种控制智能灯的方法及智能灯.pdf
本发明涉及一种控制智能灯的方法及智能灯,其中控制智能灯的方法包括检测场景分组选择操作;响应于检测到的场景分组选择操作,保存选择的场景分组信息;接收第二智能灯发送的包括人员移动信息的广播消息;判断第二智能灯的分组信息和第一智能灯的分组信息是否匹配,确定第一智能灯是否发光;如果匹配,则第一智能灯发光。本发明解决了用户不熟悉配网,配不上网等难题,让用户即买即用。此外,本发明中的智能夜灯的工作方式,不是有人移动则全部亮起,而是亮起有人的空间和公共空间的夜灯,避免了对其他空间用户的干扰。

一种杀虫灯.pdf
本发明涉及农业杀虫技术领域。一种杀虫灯,包括诱虫光源、杀虫网、集虫箱、保护罩、和支撑架,所述支撑架固定在地面上,所述支撑架顶部设有保护罩,保护罩内侧设置有反光涂料,所述保护罩内侧上安装有杀虫网,所述杀虫网通过高压发生器连接电源;所述诱虫光源安装在保护罩下方的支撑架上,所述集虫箱安装诱虫光源下部的支撑架上。本发明通过反射形成两个诱虫光源,这样对害虫形成一个更大的吸引,同时保护罩和诱虫光源之间均设置杀虫网,提供杀虫效率。