
一种水体漂浮植物清理机器人.pdf

小寄****淑k

1/10

2/10

3/10
4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种水体漂浮植物清理机器人.pdf
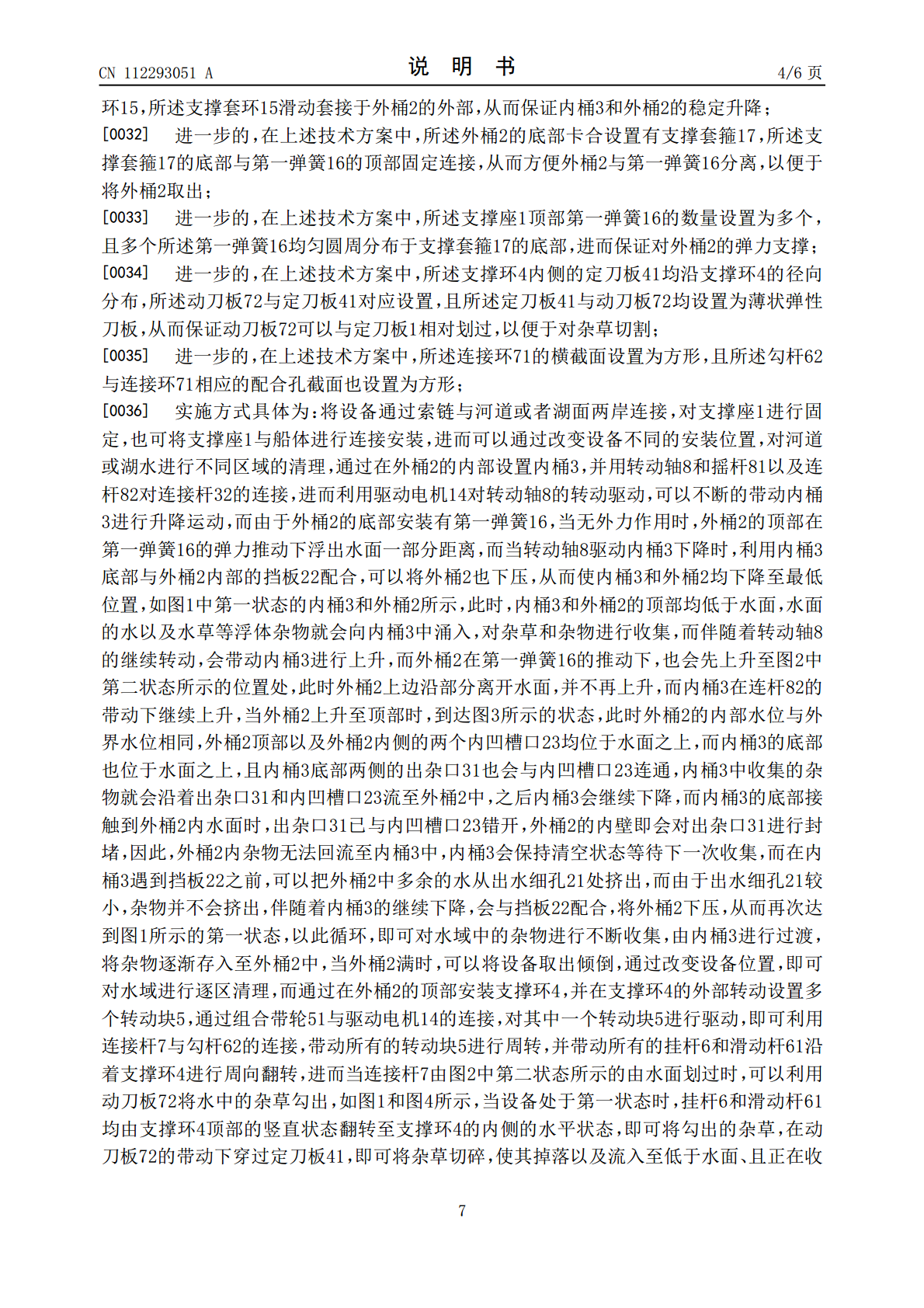
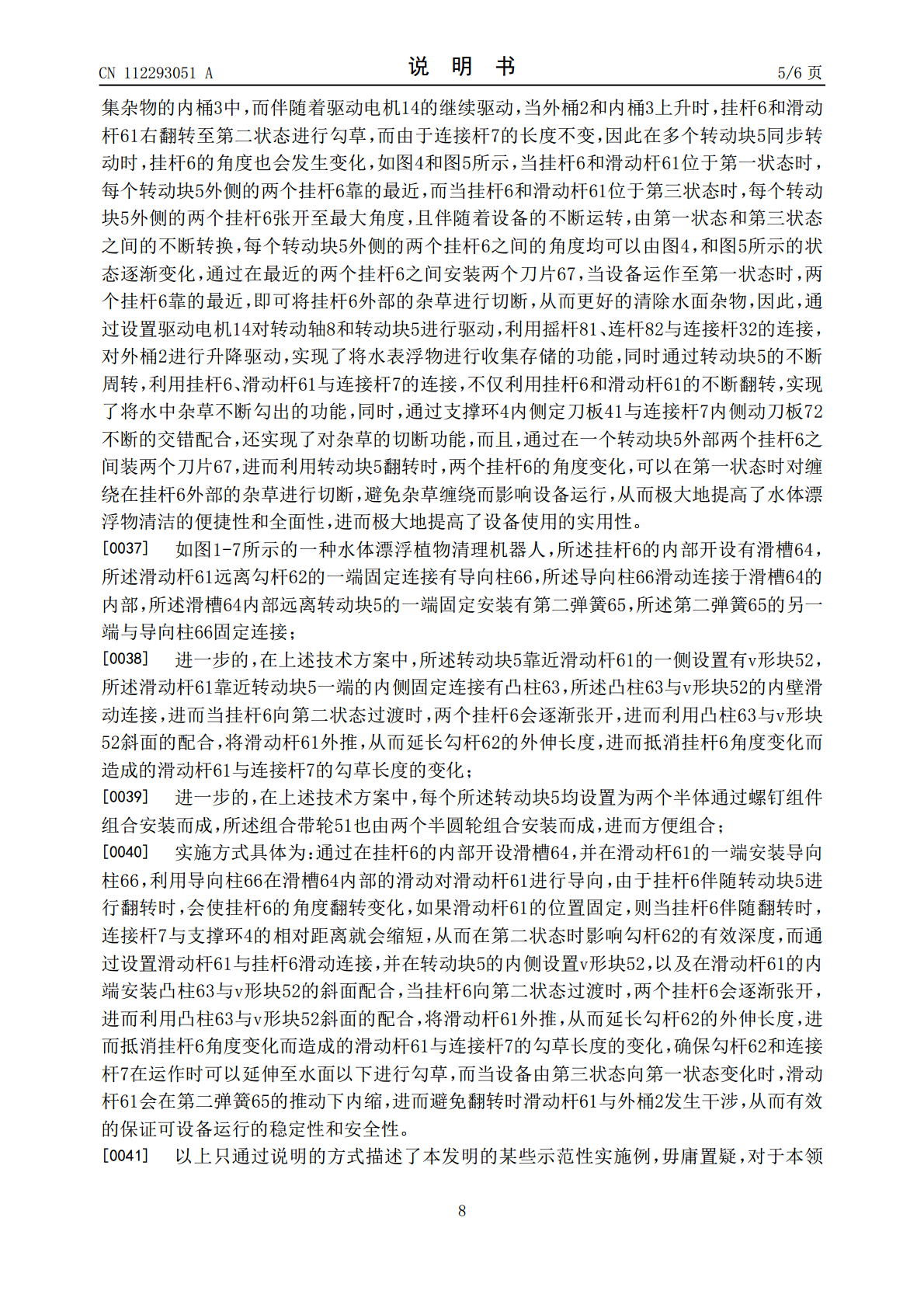
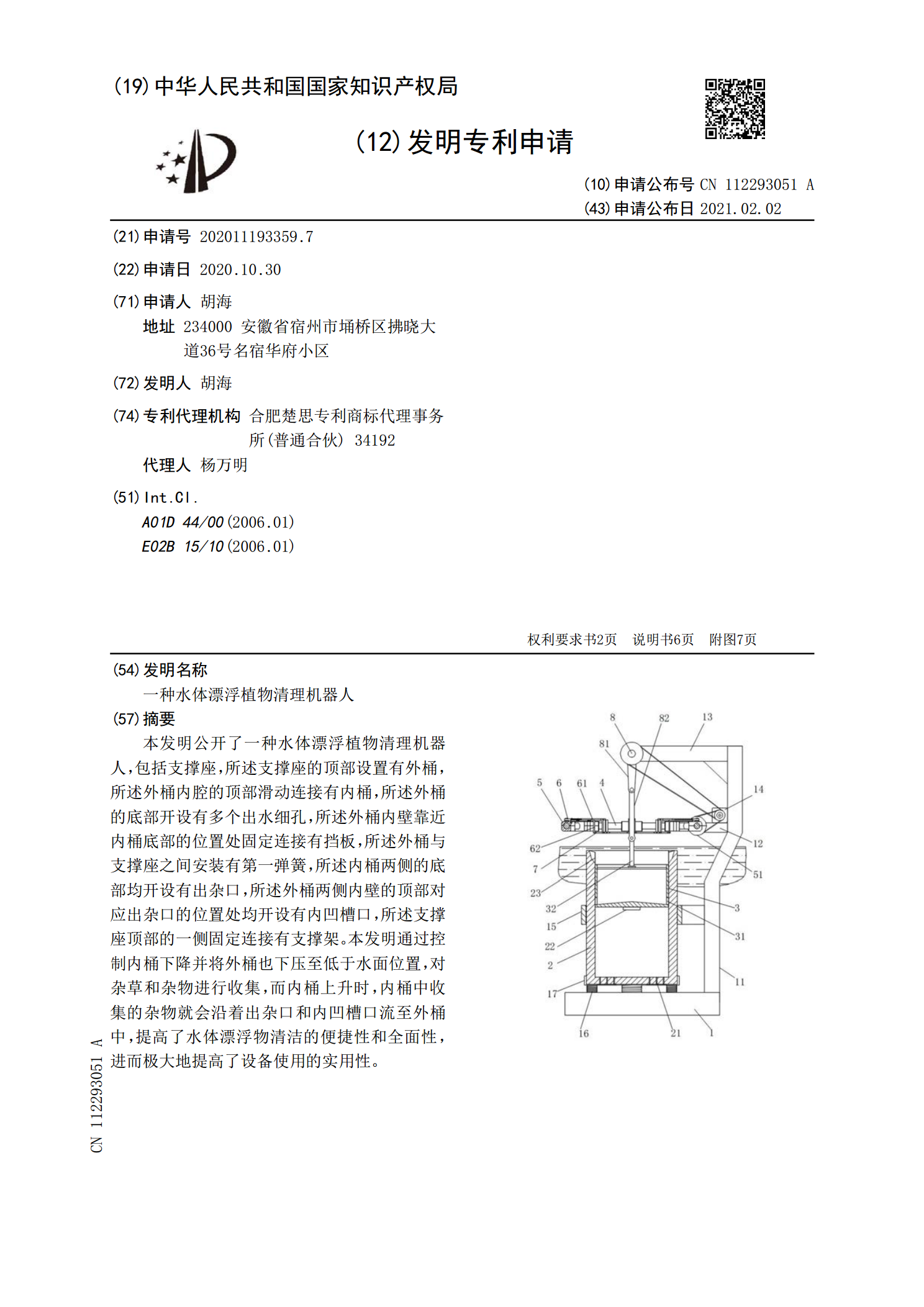
本发明公开了一种水体漂浮植物清理机器人,包括支撑座,所述支撑座的顶部设置有外桶,所述外桶内腔的顶部滑动连接有内桶,所述外桶的底部开设有多个出水细孔,所述外桶内壁靠近内桶底部的位置处固定连接有挡板,所述外桶与支撑座之间安装有第一弹簧,所述内桶两侧的底部均开设有出杂口,所述外桶两侧内壁的顶部对应出杂口的位置处均开设有内凹槽口,所述支撑座顶部的一侧固定连接有支撑架。本发明通过控制内桶下降并将外桶也下压至低于水面位置,对杂草和杂物进行收集,而内桶上升时,内桶中收集的杂物就会沿着出杂口和内凹槽口流至外桶中,提高了水

一种用于清理水体中漂浮物的船体清理系统.pdf
本发明提供了一种用于清理水体中漂浮物的船体清理系统,包括:半潜船的船体,所述船体内部自船头向船尾方向依次布置有处理区,过滤筛分区,以及仓储区;所述船体前端设有与处理区相接通的扁口管,所述扁口管部分沉入水体中且能够通过船体浮力控制改变沉入水体的深度,所述处理区的底端设有涡流电机以及通过涡流电机驱动的绞碎装置,所述过滤筛分区通过设置过滤板将内部空间分为位于上层的集污区与位于下层的净水区;所述船体靠前端的两侧设有聚集杆,聚集杆的底端设有若干喷射头,所述喷射头通过注入高压气体而能够向船体前方的深水区喷射高压水汽。
一种富营养化水体漂浮植物处理装置.pdf
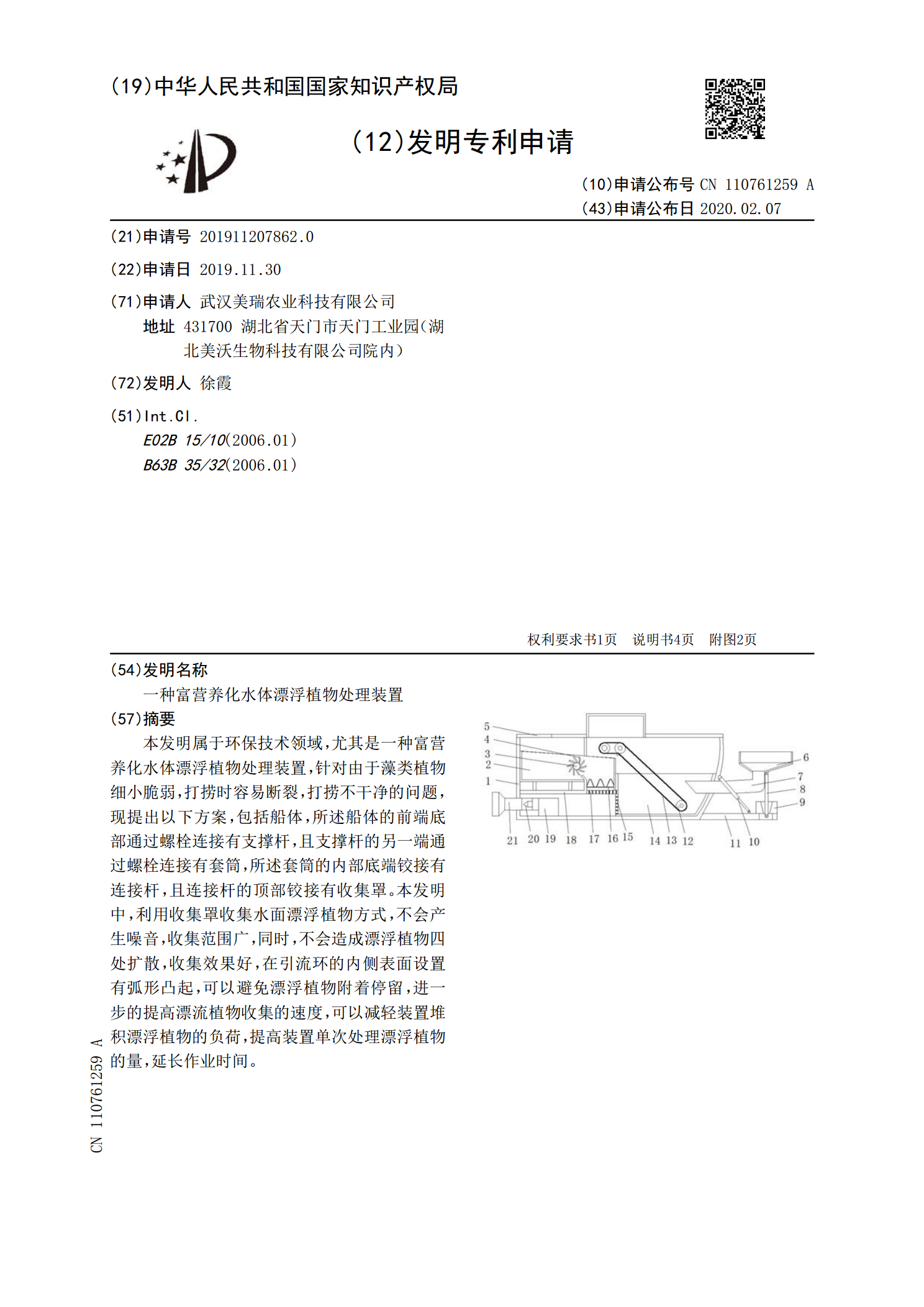
本发明属于环保技术领域,尤其是一种富营养化水体漂浮植物处理装置,针对由于藻类植物细小脆弱,打捞时容易断裂,打捞不干净的问题,现提出以下方案,包括船体,所述船体的前端底部通过螺栓连接有支撑杆,且支撑杆的另一端通过螺栓连接有套筒,所述套筒的内部底端铰接有连接杆,且连接杆的顶部铰接有收集罩。本发明中,利用收集罩收集水面漂浮植物方式,不会产生噪音,收集范围广,同时,不会造成漂浮植物四处扩散,收集效果好,在引流环的内侧表面设置有弧形凸起,可以避免漂浮植物附着停留,进一步的提高漂流植物收集的速度,可以减轻装置堆积漂浮
一种湖面漂浮式水体修复装置.pdf
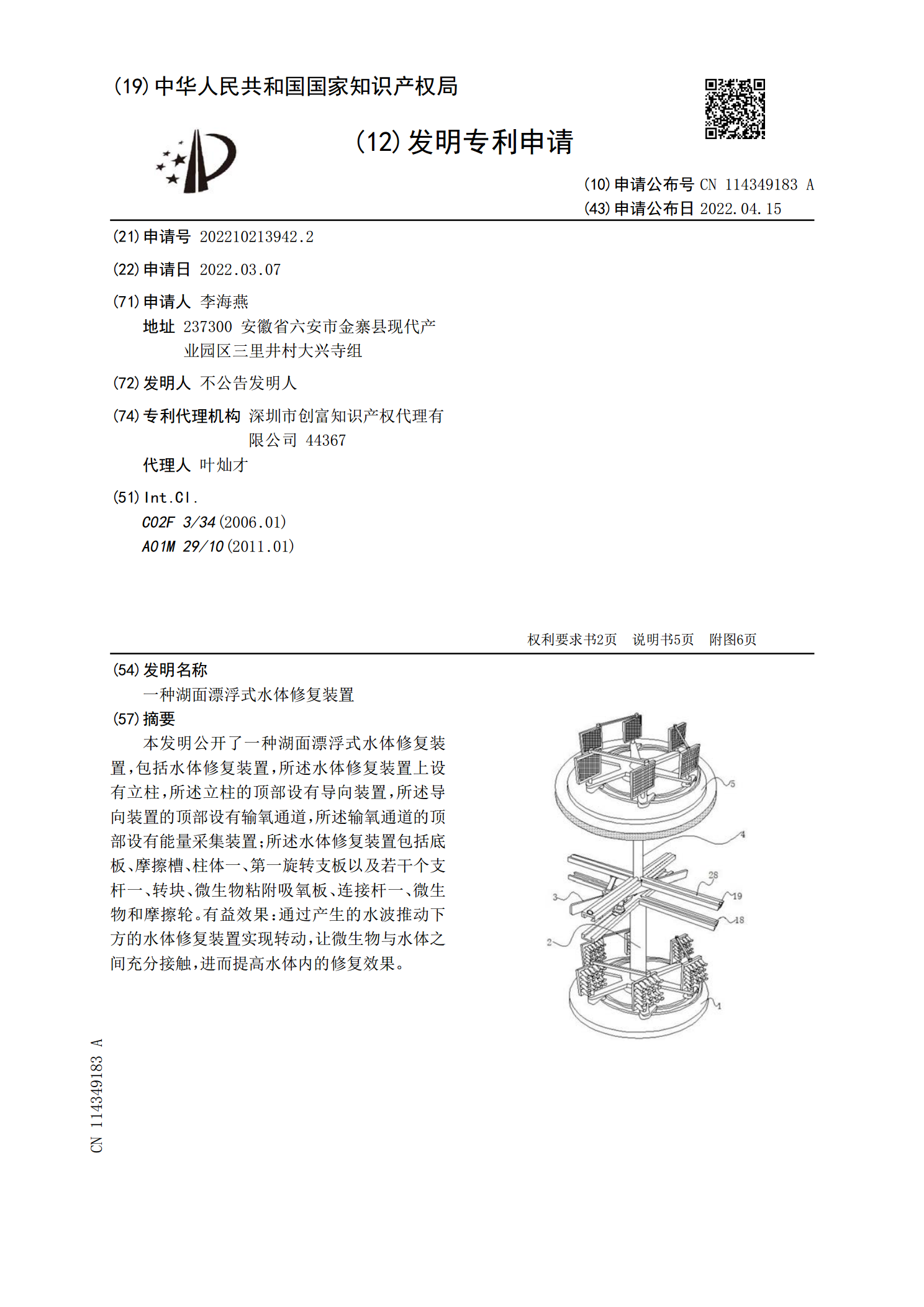
本发明公开了一种湖面漂浮式水体修复装置,包括水体修复装置,所述水体修复装置上设有立柱,所述立柱的顶部设有导向装置,所述导向装置的顶部设有输氧通道,所述输氧通道的顶部设有能量采集装置;所述水体修复装置包括底板、摩擦槽、柱体一、第一旋转支板以及若干个支杆一、转块、微生物粘附吸氧板、连接杆一、微生物和摩擦轮。有益效果:通过产生的水波推动下方的水体修复装置实现转动,让微生物与水体之间充分接触,进而提高水体内的修复效果。

一种漂浮物清理船.pdf
本发明提供一种漂浮物清理船,包括收集船、引拉船和拦截臂,两个所述引拉船分别通过两个拦截臂连接于所述收集船的船头,所述收集船在靠近船尾的位置设有引拉船收纳装置,所述引拉船在非工作状态下被置于引拉船收纳装置中,所述拦截壁紧贴收集船侧壁设置,引拉船被收纳于靠近船尾的位置而拦截臂被紧贴于收集船侧壁收纳充分利用了船体外表面的空间,为收集仓预留出了位置,从而可选择是否需要使用引拉船和拦截壁,丰富了漂浮物清理船的使用场景,并且引拉船和拦截臂在收纳时紧贴船体外表面,不容易在行驶过程中挂到障碍物,使得驾驶更加便捷。