
轴流压缩机的静叶调节机构、静叶控制方法及装置.pdf

文宣****66


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轴流压缩机的静叶调节机构、静叶控制方法及装置.pdf
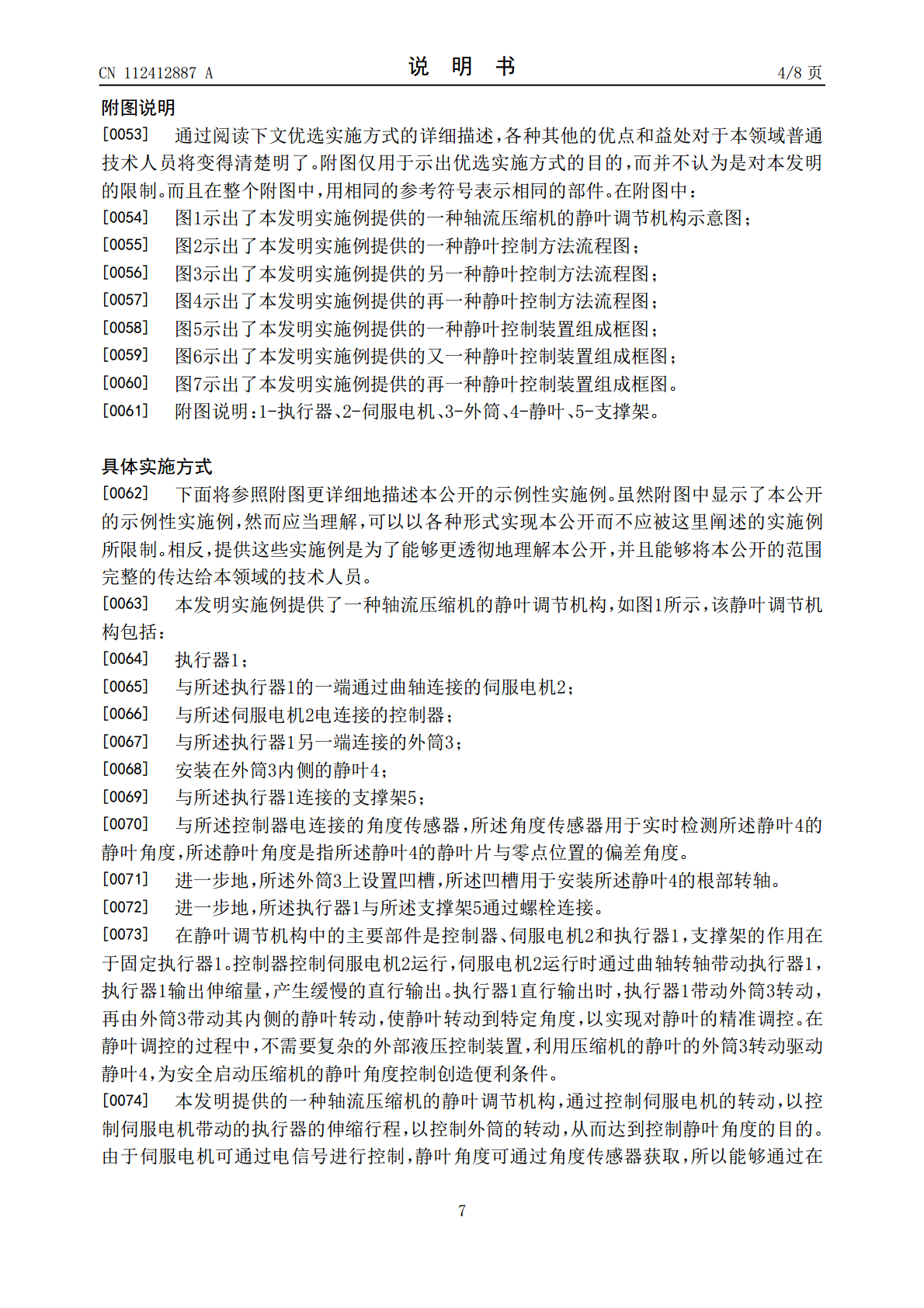
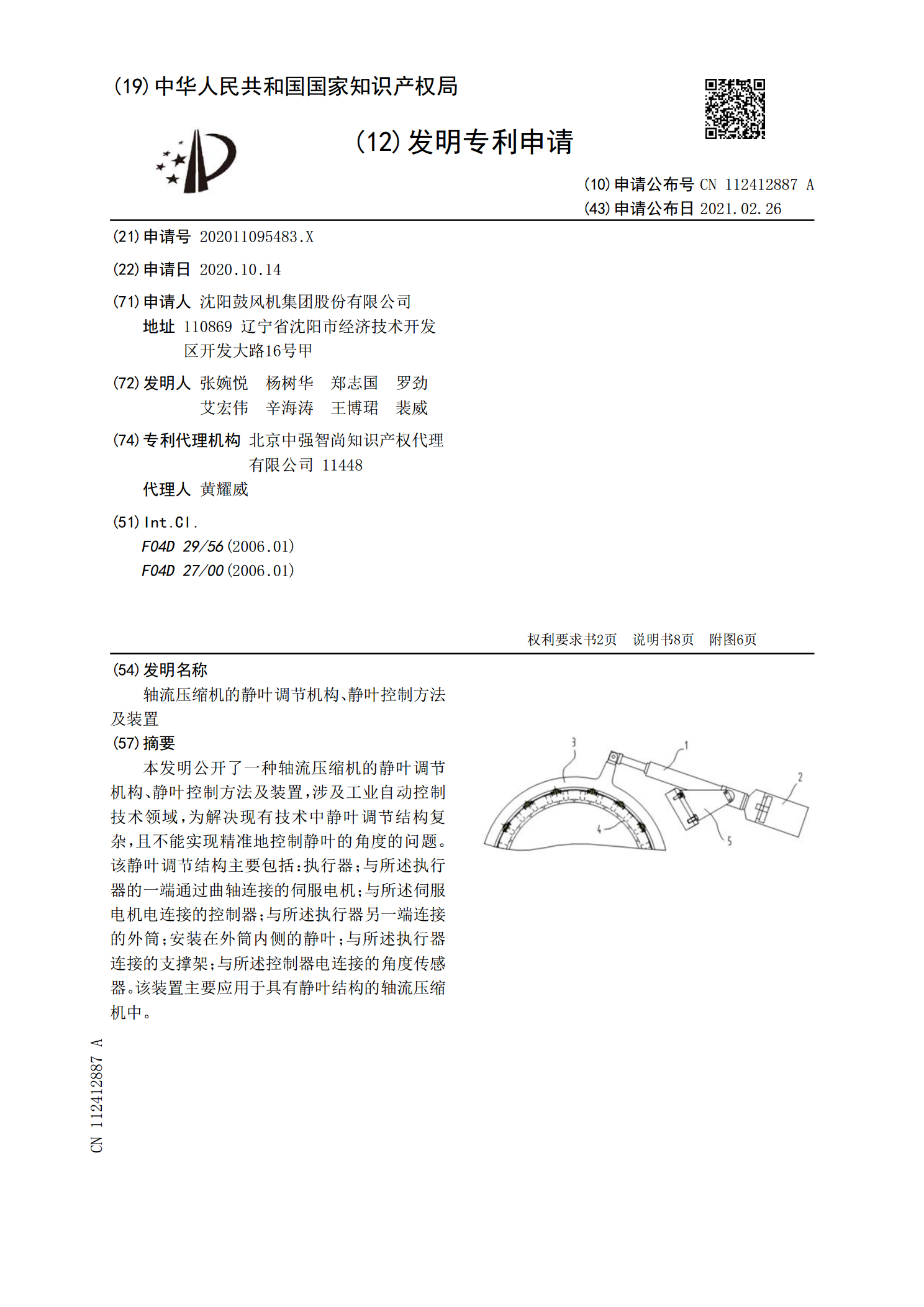
本发明公开了一种轴流压缩机的静叶调节机构、静叶控制方法及装置,涉及工业自动控制技术领域,为解决现有技术中静叶调节结构复杂,且不能实现精准地控制静叶的角度的问题。该静叶调节结构主要包括:执行器;与所述执行器的一端通过曲轴连接的伺服电机;与所述伺服电机电连接的控制器;与所述执行器另一端连接的外筒;安装在外筒内侧的静叶;与所述执行器连接的支撑架;与所述控制器电连接的角度传感器。该装置主要应用于具有静叶结构的轴流压缩机中。

轴流压缩机的静叶磨削方法.pdf
本发明涉及轴流压缩机领域,具体是轴流压缩机的静叶磨削方法,包括:获取转子与轴流压缩机机壳上的静叶的间隙测量值;通过预设间隙设计值与间隙测量值相减,获取静叶的磨削值;将机壳安装在立式车床上,通过立式车床建立坐标系;通过坐标系,获取静叶的待加工部的初始坐标;通过坐标系,获取按照磨削值进行磨削后的静叶的目标坐标;利用在立式车床的滑枕底部安装的砂轮磨削静叶的待加工部,使得砂轮的磨削面由初始坐标移动到目标坐标时停止。通过确定静叶的初始坐标和目标坐标,能够使得砂轮的磨削面精确的抵触到静叶的待加工部,以及使得砂轮按照磨

压气机静叶调节机构.pdf
一种压气机静叶调节机构,其中满足气动设计要求各级静子叶片的调节角度及范围差别较大的要求。其包括原动件、联动轴、多级连杆组件、多级联动环组件以及多级驱动端组件,其中,原动件用于输出一运动;联动轴由所述原动件驱动并输出转动;多级驱动端组件的各级驱动端组件包括多个转接齿轮和驱动体;所述联动轴对应各级驱动端组件提供齿轮轴部,所述齿轮轴部与对应的各级驱动端组件共同构成行星齿轮系,在所述行星齿轮系中,所述齿轮轴部设置为太阳齿轮,多个所述转接齿轮设置为行星轮,所述驱动体提供内齿轮,所述多级连杆组件与所述多级联动环组件和

一种静叶抗畸变轴流压气机及轴流压气机静叶抗畸变方法.pdf
本发明提供了一种静叶抗畸变轴流压气机及轴流压气机静叶抗畸变方法,所述压气机静叶畸变区的叶栅稠度大于非畸变区叶栅稠度,非畸变区叶栅稠度为原始稠度。本设计中,静叶轴流压气机的静叶非均匀分布,在受进气畸变流体影响的静叶区域增加叶栅稠度,而不改变其他区域的原始静叶叶片稠度,实现利用非均匀布置静叶调控非均匀流场的目的,保证了压气机在均匀来流情况下性能(流量、压比、效率等)不发生变化,同时提高了进气畸变条件下的气动性能和稳定裕度。

TRT静叶调节机构故障的分析与处理.docx
TRT静叶调节机构故障的分析与处理TRT静叶调节机构是一种用于风电场中风机的控制系统,用于调整叶片的角度以控制风机的输出功率。然而,由于长时间的运行和环境因素的影响,TRT静叶调节机构可能会发生故障。本文将分析常见的TRT静叶调节机构故障原因,并提供相应的处理方法。一、故障原因:1.电气故障:电气故障是TRT静叶调节机构常见的故障原因之一。可能的原因包括电缆连接松动、传感器故障、控制器故障等。这些故障可能导致静叶调节机构无法正常工作或误操作。2.机械故障:机械故障是TRT静叶调节机构另一个常见的故障原因。