
电子设备、摄像装置及其防抖方法和防抖装置.pdf

书生****aa


1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电子设备、摄像装置及其防抖方法和防抖装置.pdf
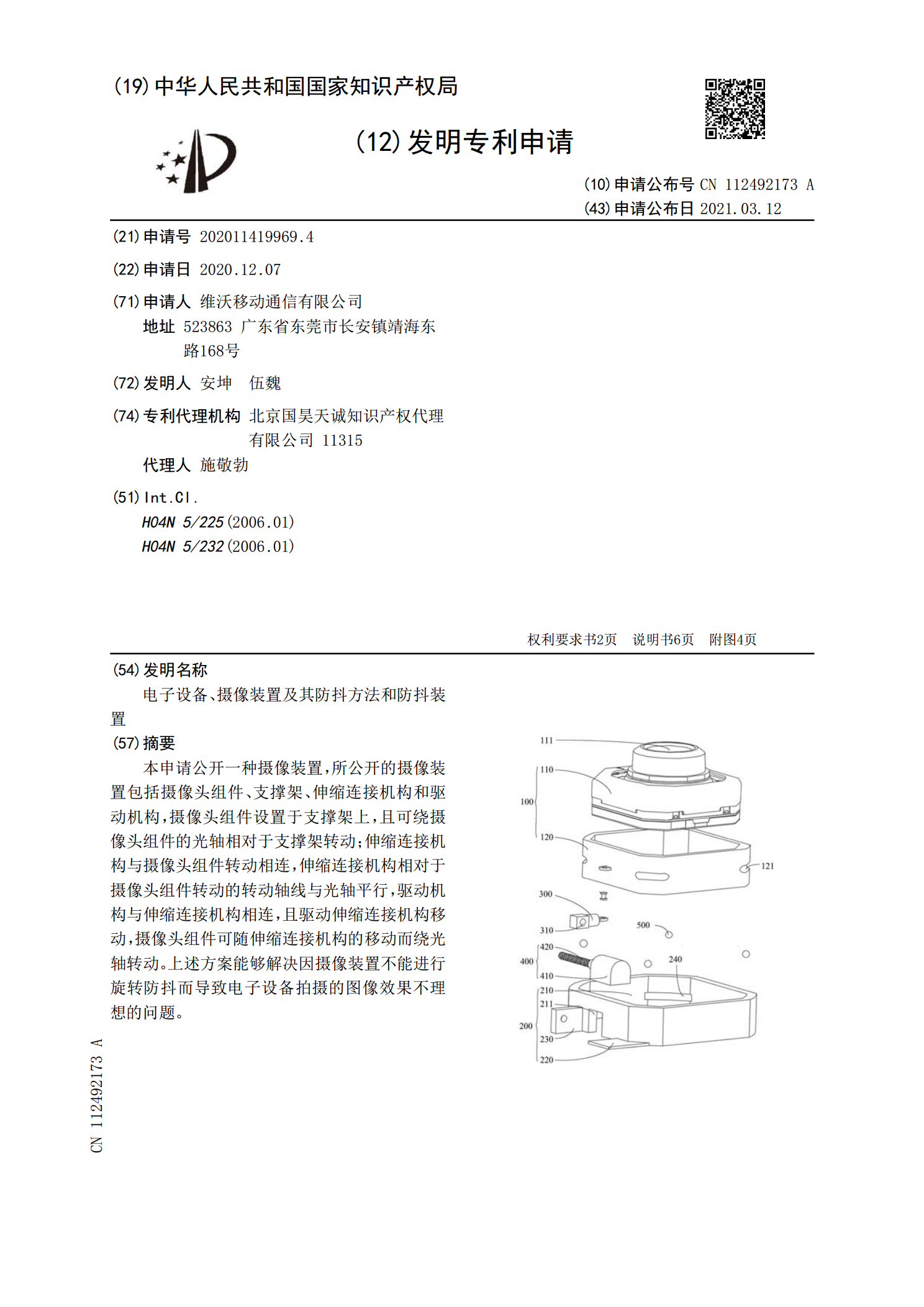
本申请公开一种摄像装置,所公开的摄像装置包括摄像头组件、支撑架、伸缩连接机构和驱动机构,摄像头组件设置于支撑架上,且可绕摄像头组件的光轴相对于支撑架转动;伸缩连接机构与摄像头组件转动相连,伸缩连接机构相对于摄像头组件转动的转动轴线与光轴平行,驱动机构与伸缩连接机构相连,且驱动伸缩连接机构移动,摄像头组件可随伸缩连接机构的移动而绕光轴转动。上述方案能够解决因摄像装置不能进行旋转防抖而导致电子设备拍摄的图像效果不理想的问题。
一种防抖装置、光学防抖摄像模组和电子设备.pdf
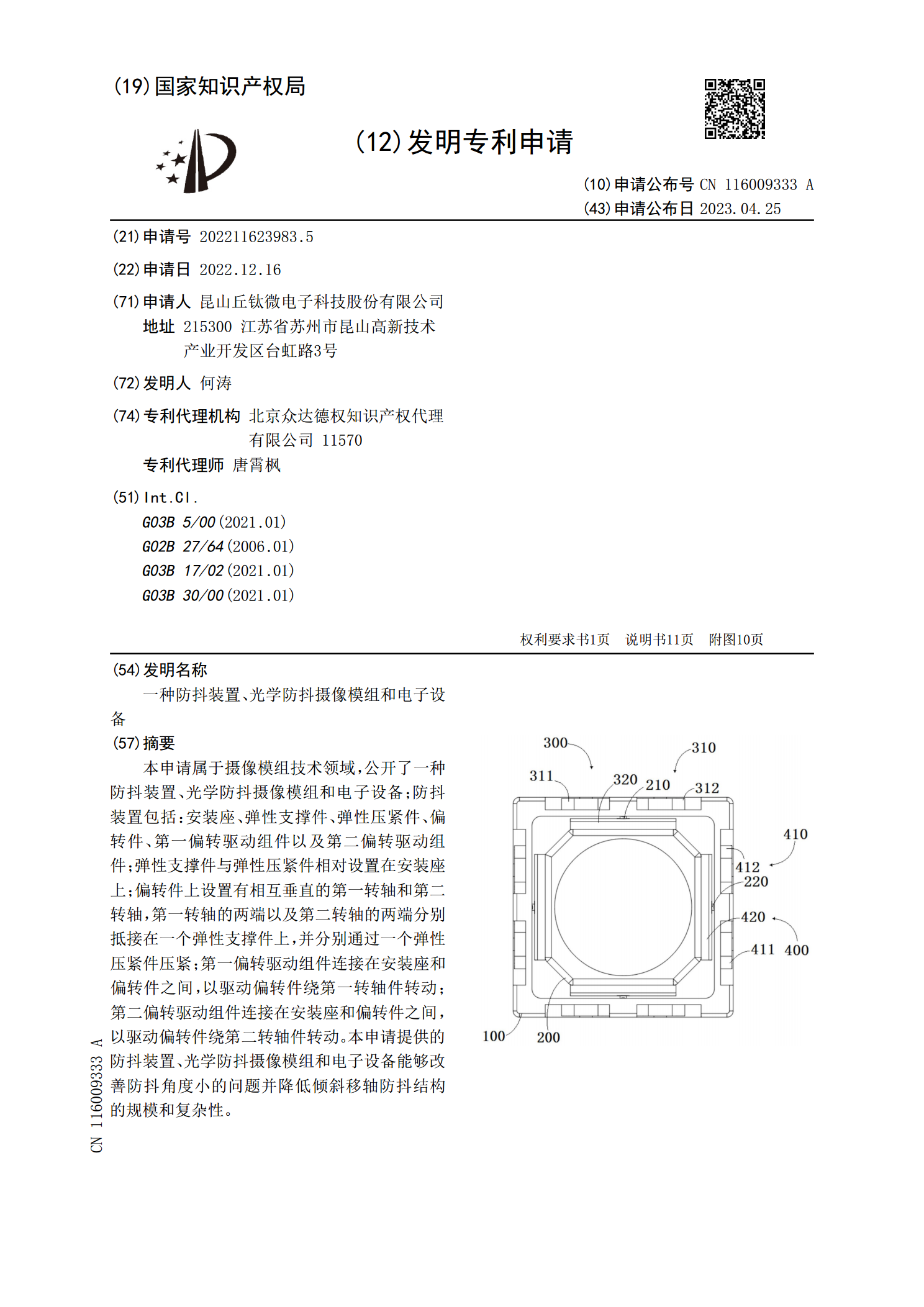
本申请属于摄像模组技术领域,公开了一种防抖装置、光学防抖摄像模组和电子设备;防抖装置包括:安装座、弹性支撑件、弹性压紧件、偏转件、第一偏转驱动组件以及第二偏转驱动组件;弹性支撑件与弹性压紧件相对设置在安装座上;偏转件上设置有相互垂直的第一转轴和第二转轴,第一转轴的两端以及第二转轴的两端分别抵接在一个弹性支撑件上,并分别通过一个弹性压紧件压紧;第一偏转驱动组件连接在安装座和偏转件之间,以驱动偏转件绕第一转轴件转动;第二偏转驱动组件连接在安装座和偏转件之间,以驱动偏转件绕第二转轴件转动。本申请提供的防抖装置、

防抖结构、防抖系统及摄像装置.pdf
本发明提供了一种防抖结构、防抖系统及摄像装置。防抖结构包括:底座;外壳,外壳罩设在底座的外部并在二者之间形成容置腔;透镜支撑体,透镜支撑体设置在容置腔内;至少四组PIN端脚结构,至少四组PIN端脚结构位于容置腔内,且底座的各侧边处均对应设置有至少一组PIN端脚结构,各组PIN端脚结构均包括第一PIN端脚、第二PIN端脚、压片,且第一PIN端脚和第二PIN端脚彼此独立设置在底座上,压片设置在透镜支撑体上;多根SMA丝线,各组PIN端脚结构均对应连接两根彼此交叉设置的SMA丝线,其中,一根SMA丝线将第一PI
防抖结构、摄像装置及电子设备.pdf
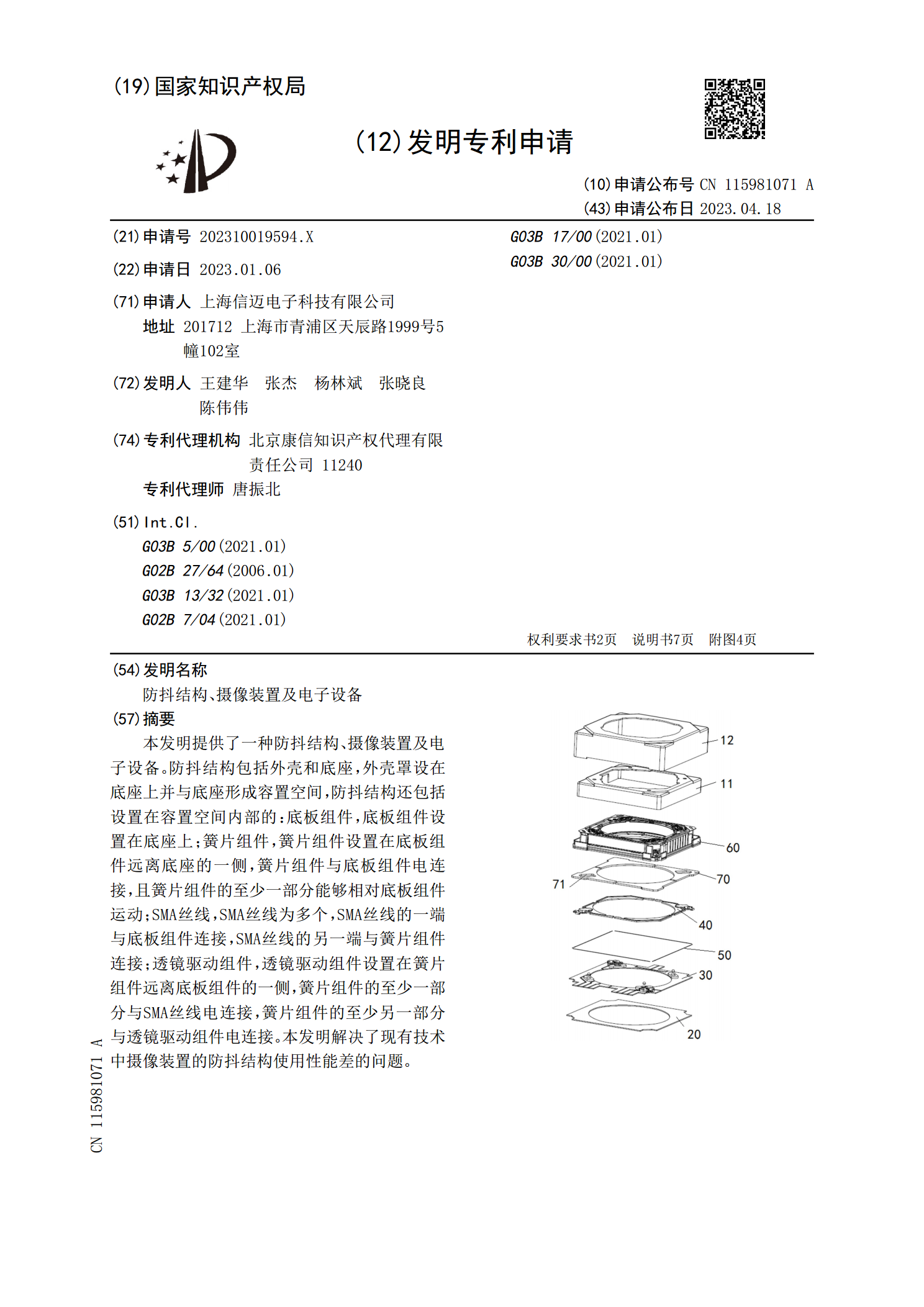
本发明提供了一种防抖结构、摄像装置及电子设备。防抖结构包括外壳和底座,外壳罩设在底座上并与底座形成容置空间,防抖结构还包括设置在容置空间内部的:底板组件,底板组件设置在底座上;簧片组件,簧片组件设置在底板组件远离底座的一侧,簧片组件与底板组件电连接,且簧片组件的至少一部分能够相对底板组件运动;SMA丝线,SMA丝线为多个,SMA丝线的一端与底板组件连接,SMA丝线的另一端与簧片组件连接;透镜驱动组件,透镜驱动组件设置在簧片组件远离底板组件的一侧,簧片组件的至少一部分与SMA丝线电连接,簧片组件的至少另一部

防抖结构、摄像装置及电子设备.pdf
本发明提供了一种防抖结构、摄像装置及电子设备。防抖结构包括外壳和底座,外壳罩设在底座上并与底座形成容置空间,防抖结构还包括设置在容置空间内部的:底板组件,底板组件设置在底座上;簧片组件,簧片组件设置在底板组件远离底座的一侧,簧片组件的至少一部分能够相对底板组件运动;第一丝线,第一丝线为多个,第一丝线的一端与底板组件连接,第一丝线的另一端与簧片组件连接;框架组件,框架组件随簧片组件相对底板组件运动;透镜支撑体,透镜支撑体的至少一部分设置在框架组件的内部;AF驱动组件,AF驱动组件的至少一部分设置在框架组件上