
一种多自由度旋转的机械手臂.pdf

安双****文章

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多自由度旋转的机械手臂.pdf
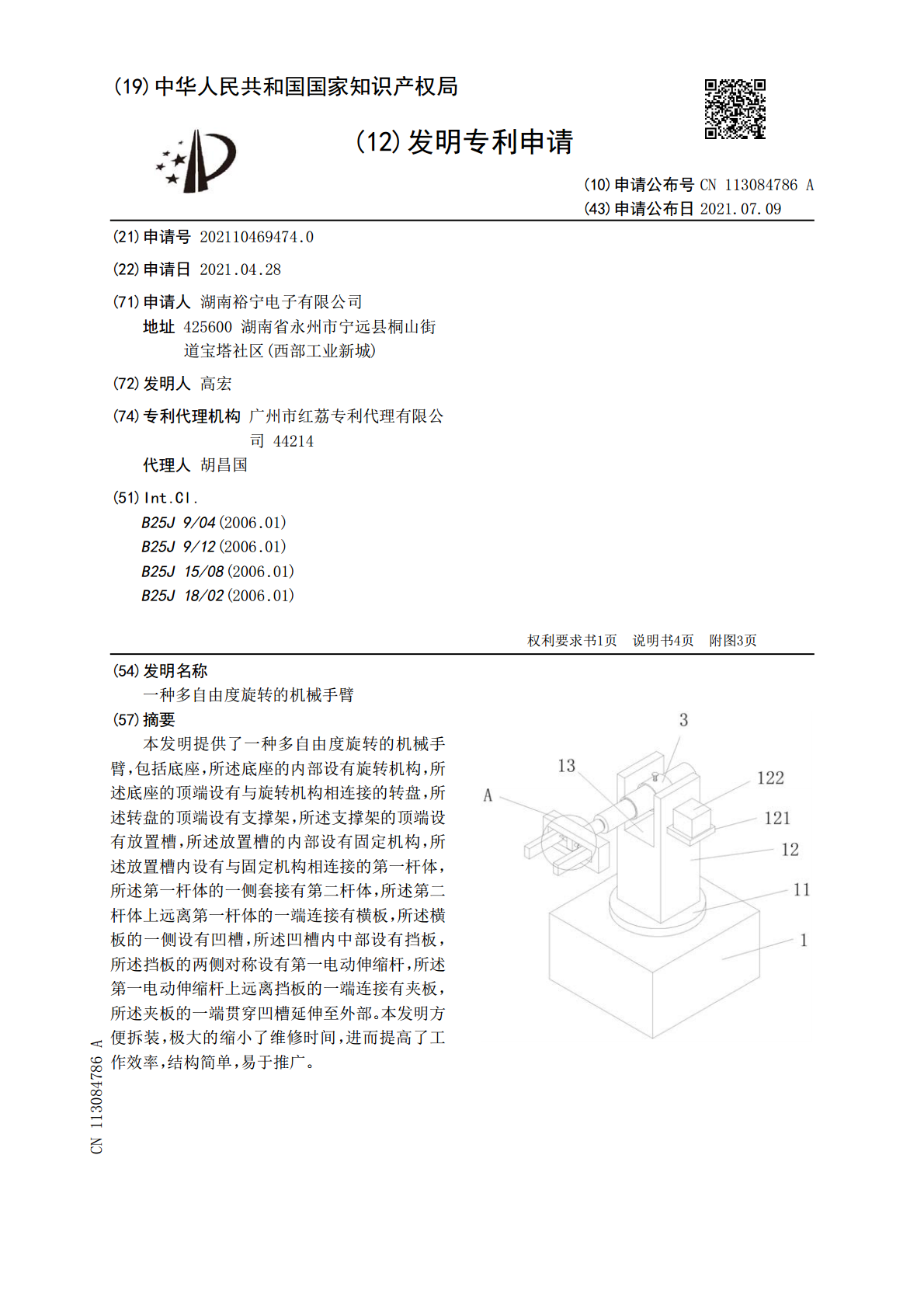
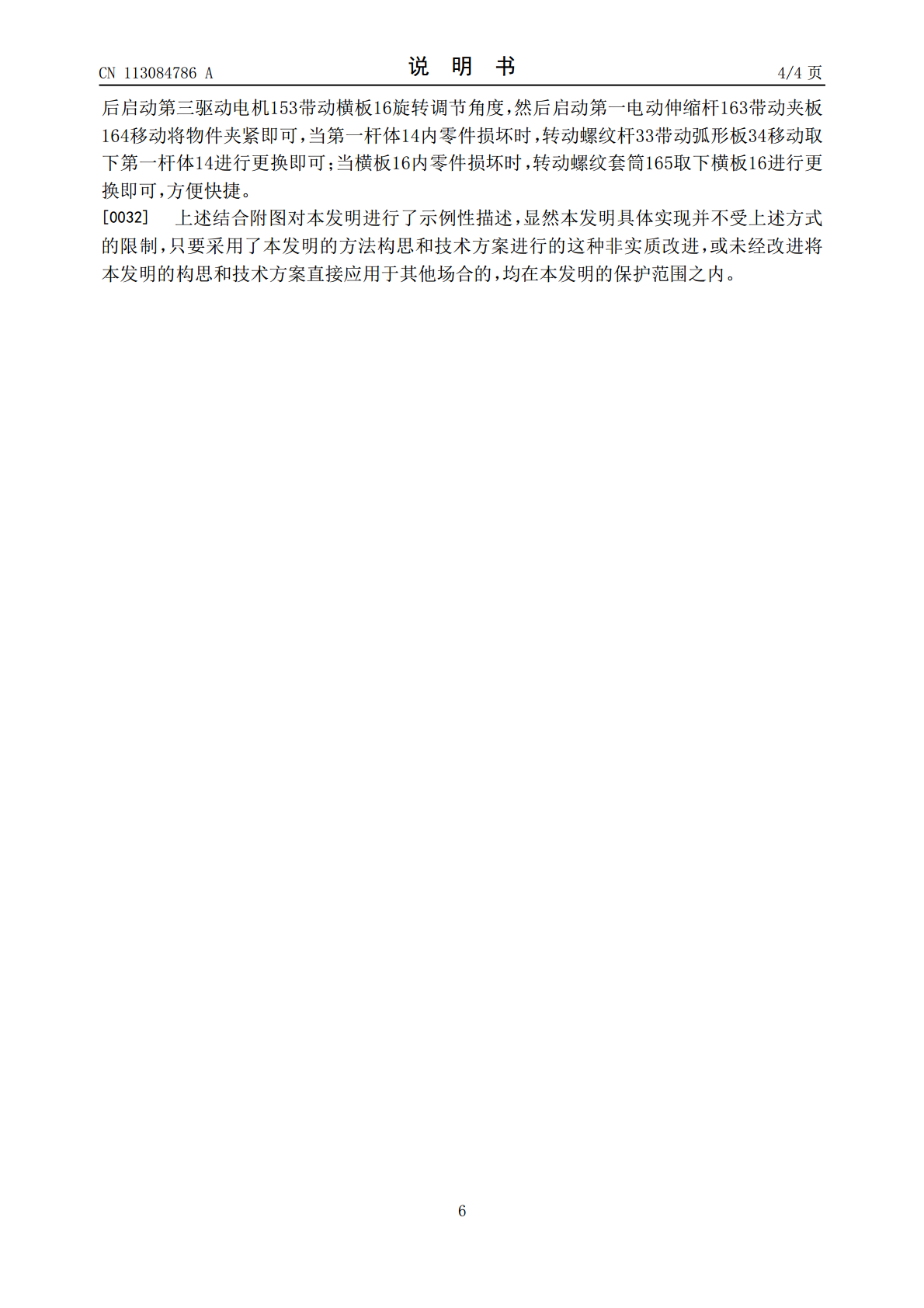
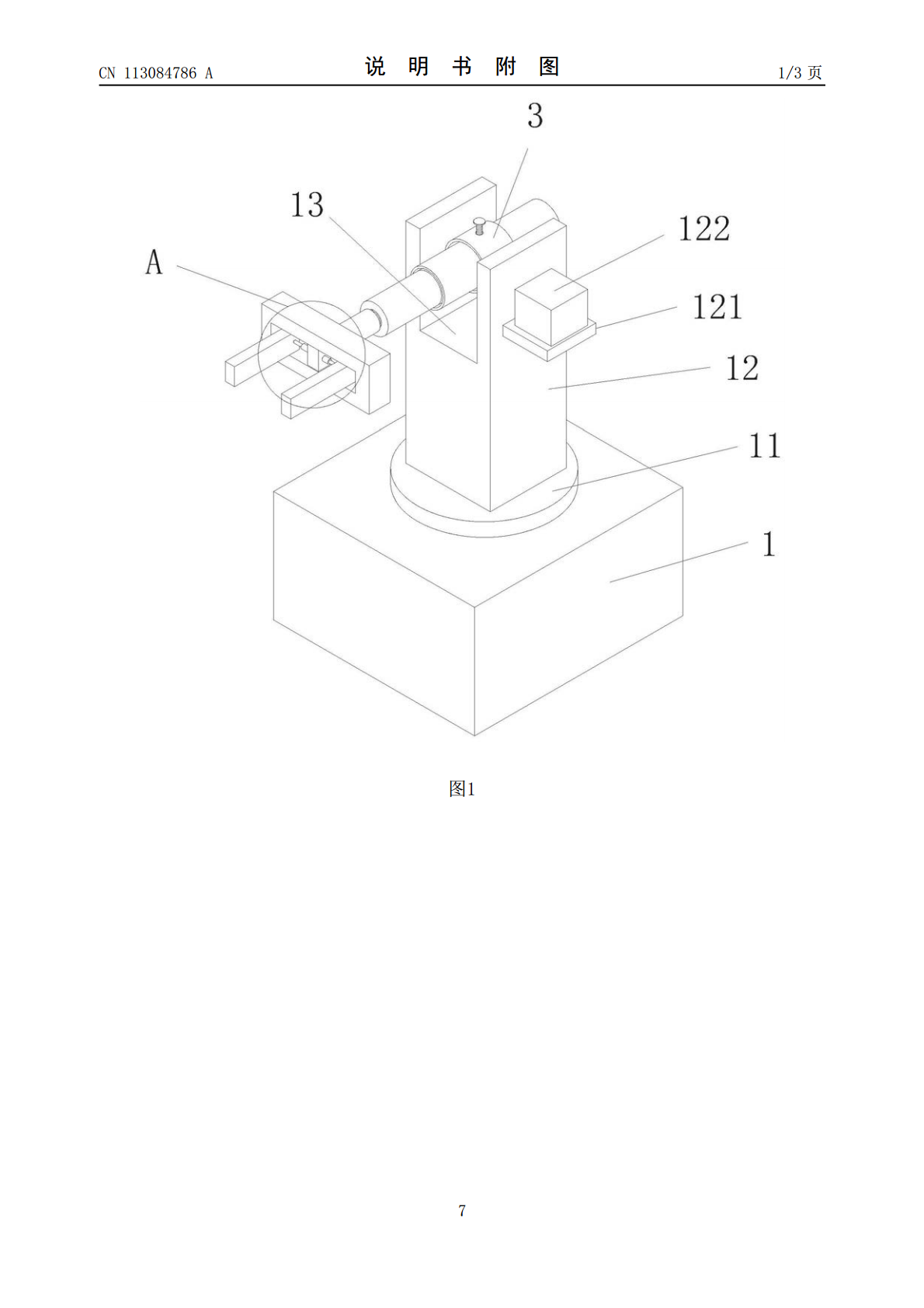
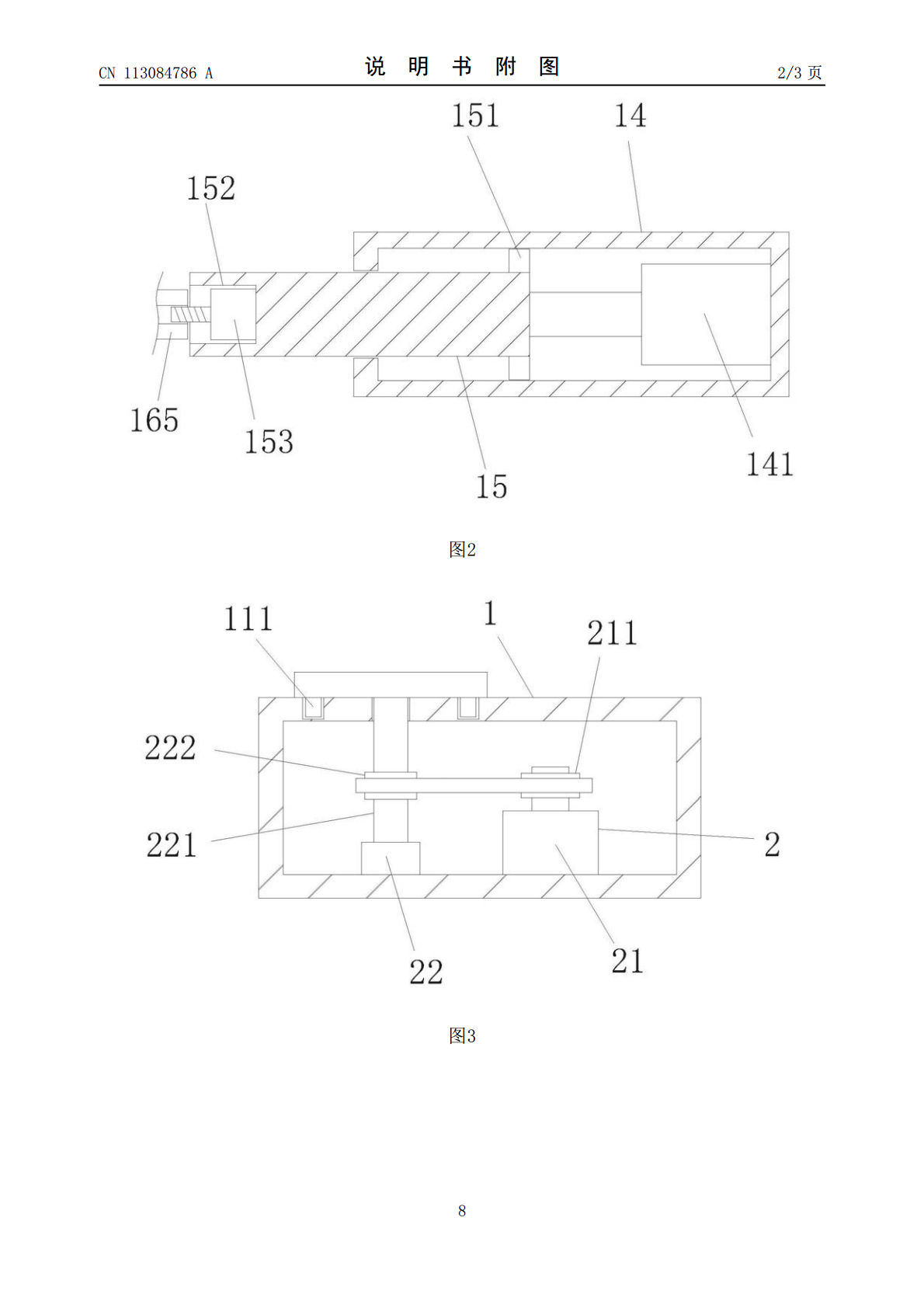
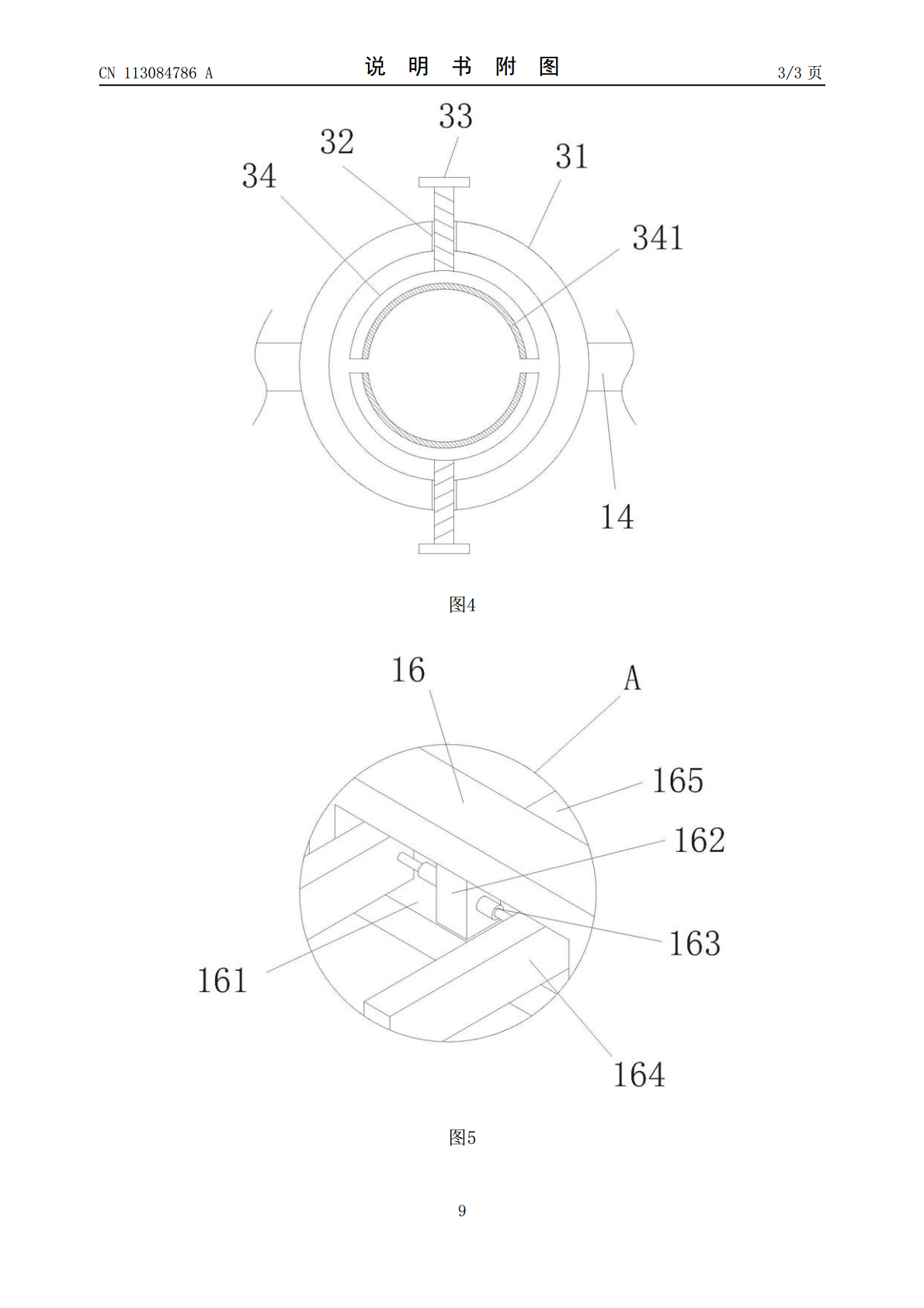
本发明提供了一种多自由度旋转的机械手臂,包括底座,所述底座的内部设有旋转机构,所述底座的顶端设有与旋转机构相连接的转盘,所述转盘的顶端设有支撑架,所述支撑架的顶端设有放置槽,所述放置槽的内部设有固定机构,所述放置槽内设有与固定机构相连接的第一杆体,所述第一杆体的一侧套接有第二杆体,所述第二杆体上远离第一杆体的一端连接有横板,所述横板的一侧设有凹槽,所述凹槽内中部设有挡板,所述挡板的两侧对称设有第一电动伸缩杆,所述第一电动伸缩杆上远离挡板的一端连接有夹板,所述夹板的一端贯穿凹槽延伸至外部。本发明方便拆装,极
一种多自由度的假肢手臂关节.pdf
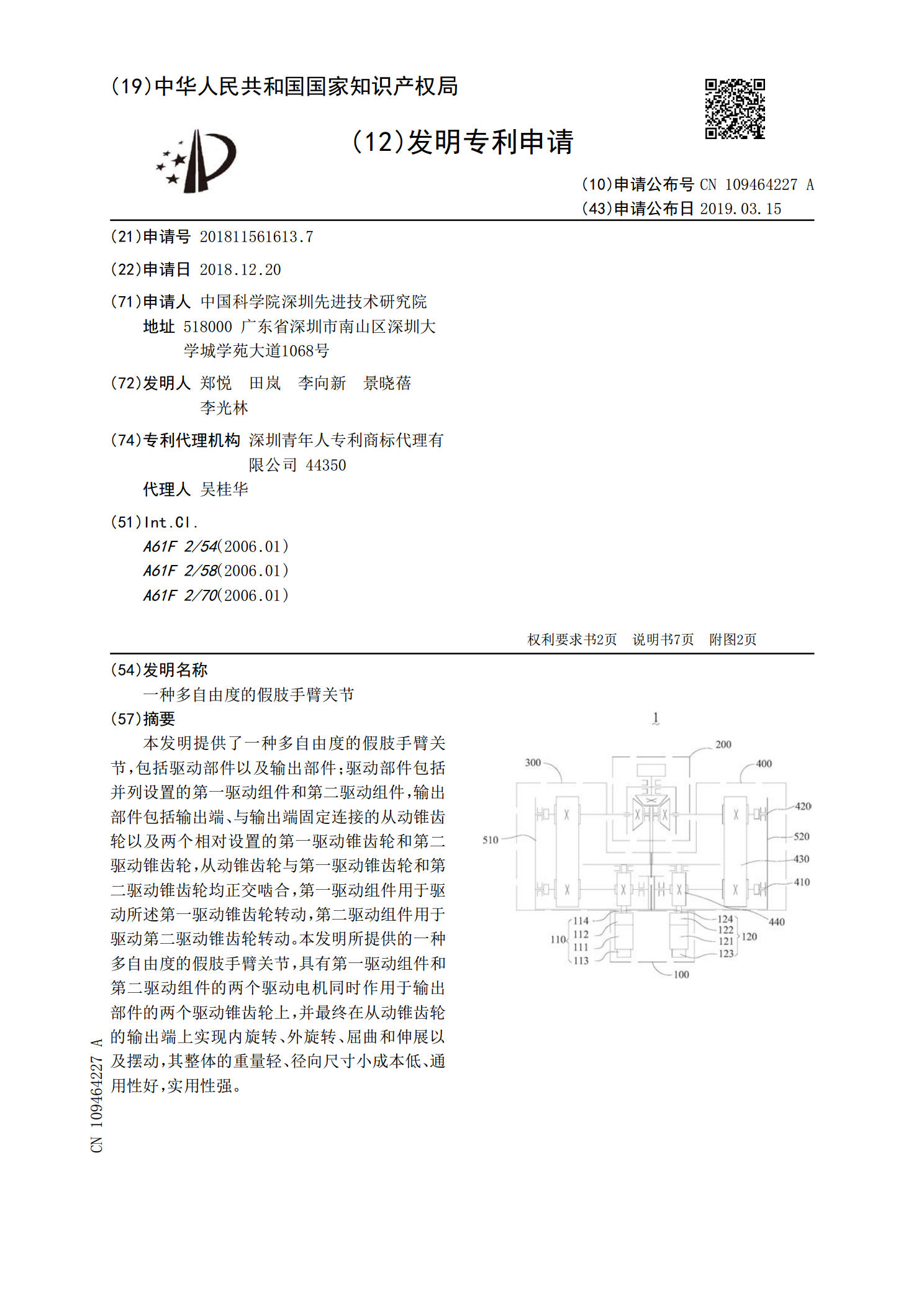
本发明提供了一种多自由度的假肢手臂关节,包括驱动部件以及输出部件;驱动部件包括并列设置的第一驱动组件和第二驱动组件,输出部件包括输出端、与输出端固定连接的从动锥齿轮以及两个相对设置的第一驱动锥齿轮和第二驱动锥齿轮,从动锥齿轮与第一驱动锥齿轮和第二驱动锥齿轮均正交啮合,第一驱动组件用于驱动所述第一驱动锥齿轮转动,第二驱动组件用于驱动第二驱动锥齿轮转动。本发明所提供的一种多自由度的假肢手臂关节,具有第一驱动组件和第二驱动组件的两个驱动电机同时作用于输出部件的两个驱动锥齿轮上,并最终在从动锥齿轮的输出端上实现内

基于单片机的多自由度机械手臂设计.docx
基于单片机的多自由度机械手臂设计基于单片机的多自由度机械手臂设计摘要:多自由度机械手臂广泛应用于工业自动化领域,能够完成一系列复杂的操作任务。本文以基于单片机的多自由度机械手臂设计为研究对象,介绍了机械手臂的结构和控制系统的设计。通过实验验证了机械手臂的运动性能和控制精度,进一步验证了设计的可行性和有效性。1.引言机械手臂是一种能够模拟人类手臂运动的机械装置,具有一定的灵活性和精确性。多自由度机械手臂具有多个关节,能够实现更加复杂的运动,被广泛应用于工业自动化领域。为了满足不同应用需求,设计一款基于单片机
一种空间多自由度手术辅助手臂机构.pdf
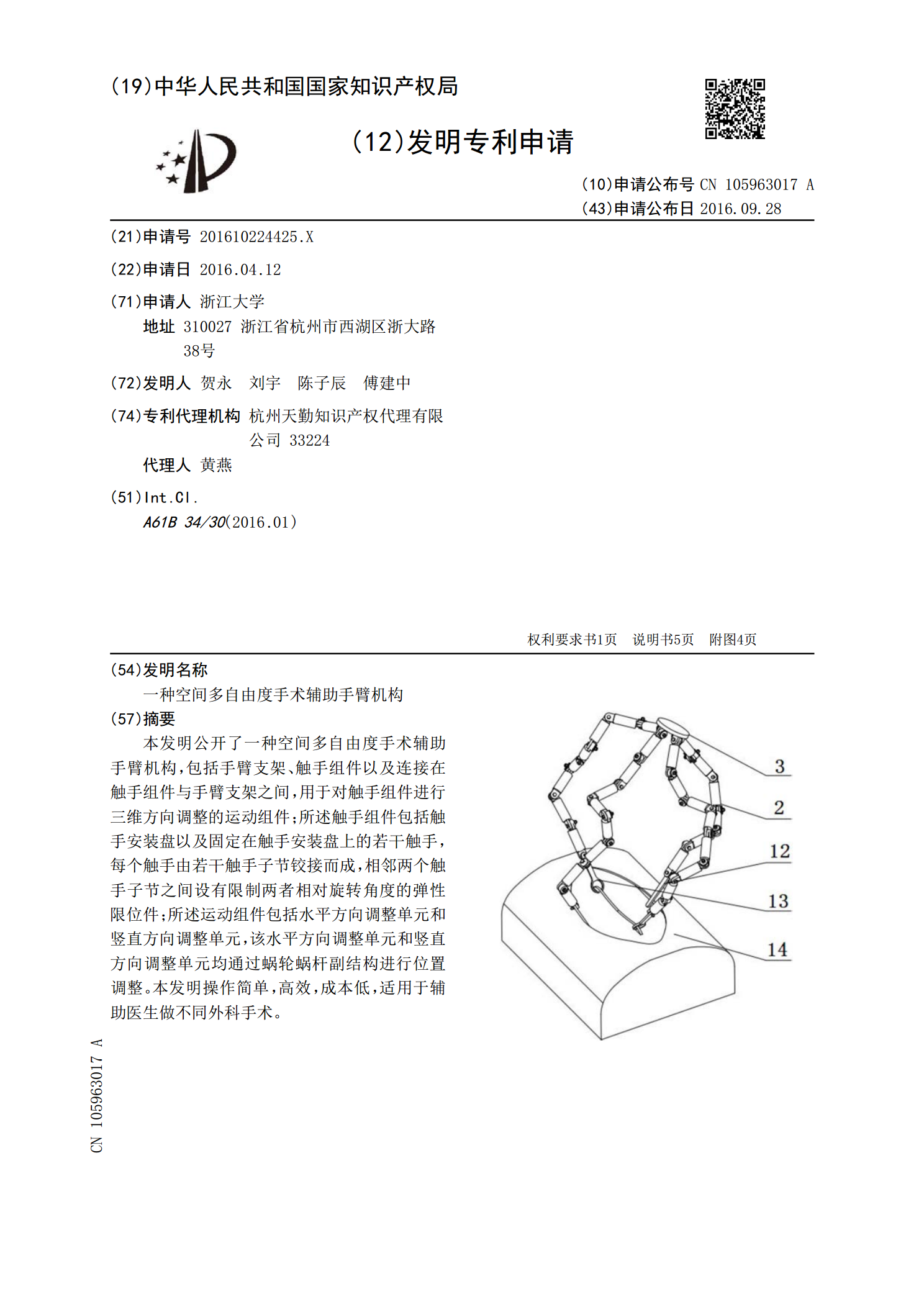
本发明公开了一种空间多自由度手术辅助手臂机构,包括手臂支架、触手组件以及连接在触手组件与手臂支架之间,用于对触手组件进行三维方向调整的运动组件;所述触手组件包括触手安装盘以及固定在触手安装盘上的若干触手,每个触手由若干触手子节铰接而成,相邻两个触手子节之间设有限制两者相对旋转角度的弹性限位件;所述运动组件包括水平方向调整单元和竖直方向调整单元,该水平方向调整单元和竖直方向调整单元均通过蜗轮蜗杆副结构进行位置调整。本发明操作简单,高效,成本低,适用于辅助医生做不同外科手术。

六自由度机械手臂.docx
在现代的工厂加工生产线上,有很多的物件需要进行多角度,位置多姿态的进行变化,用人工自然不用说了,但是用人工的话,效率会比较低,而且可能会因为人工的操作失误导致次品率的上升,这就会给工厂带来不小的损失。所以这就会选择效率高,次品率低的机械臂来完成了,而对于那些空间位置和姿势变化较为复杂的物件来说就需要多自由度的机械臂来完成了。那什么是自由度呢?下面就来和大家分享一下。通常把机械手臂的传送机构机的运动称为自由度。人从手指到肩部共有27个自由度,如果把机械手臂也做成这样多的自由度是很困难的,也是不必要的。从力学