
一种用于筒体加工的支撑环、支撑装置.pdf

是浩****32


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于筒体加工的支撑环、支撑装置.pdf
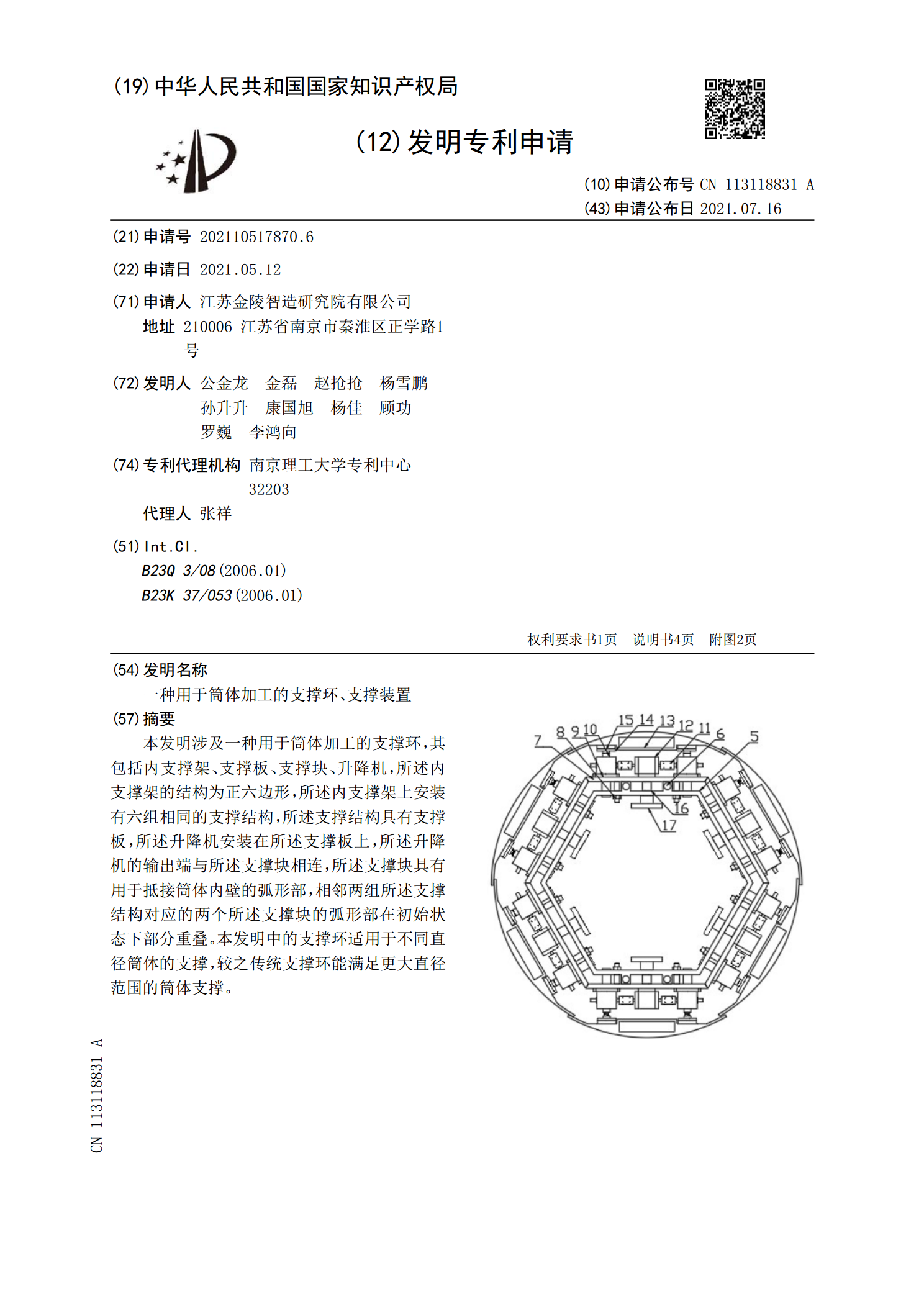
本发明涉及一种用于筒体加工的支撑环,其包括内支撑架、支撑板、支撑块、升降机,所述内支撑架的结构为正六边形,所述内支撑架上安装有六组相同的支撑结构,所述支撑结构具有支撑板,所述升降机安装在所述支撑板上,所述升降机的输出端与所述支撑块相连,所述支撑块具有用于抵接筒体内壁的弧形部,相邻两组所述支撑结构对应的两个所述支撑块的弧形部在初始状态下部分重叠。本发明中的支撑环适用于不同直径筒体的支撑,较之传统支撑环能满足更大直径范围的筒体支撑。
一种机械筒体环缝焊接用筒体支撑装置.pdf
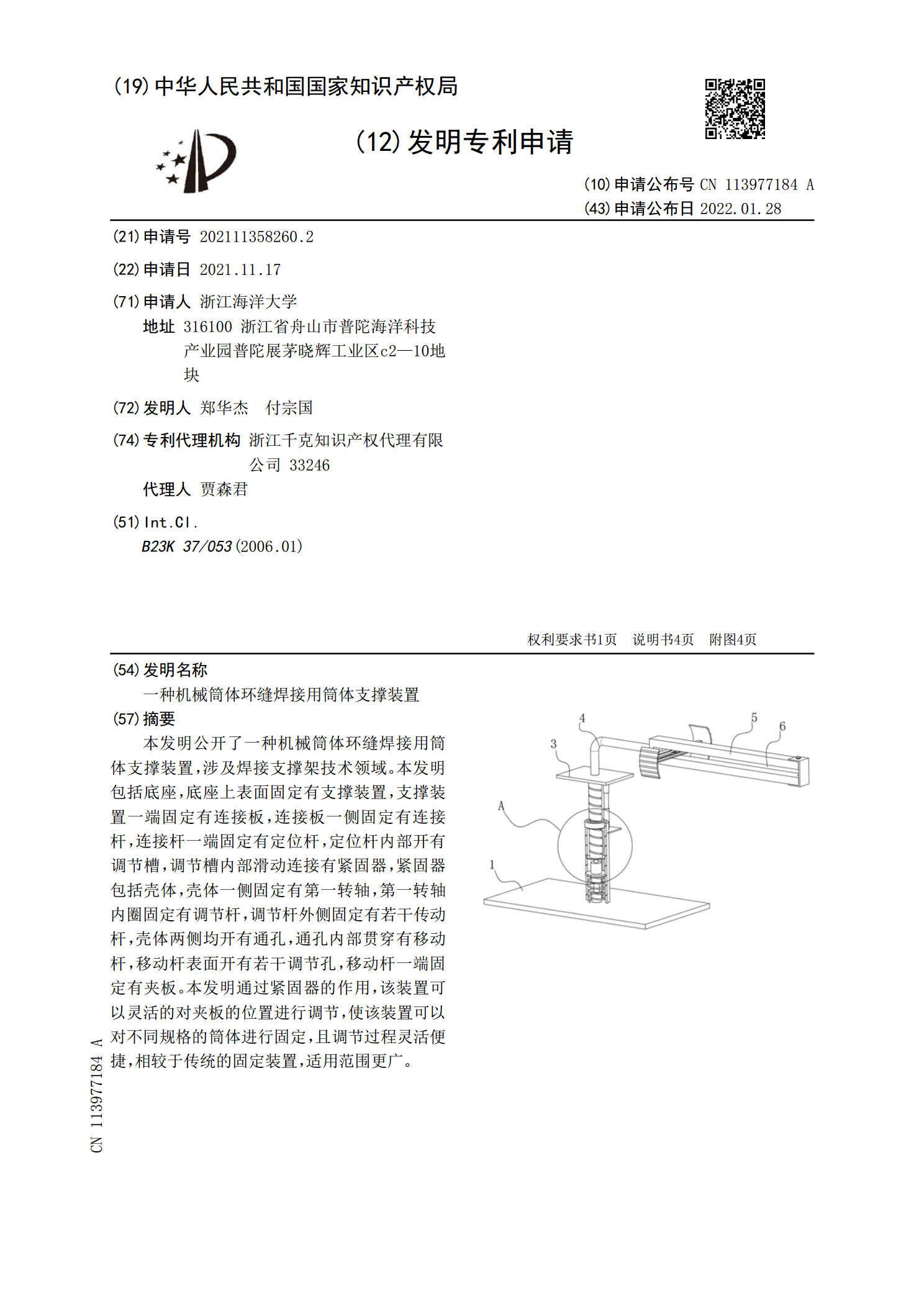
本发明公开了一种机械筒体环缝焊接用筒体支撑装置,涉及焊接支撑架技术领域。本发明包括底座,底座上表面固定有支撑装置,支撑装置一端固定有连接板,连接板一侧固定有连接杆,连接杆一端固定有定位杆,定位杆内部开有调节槽,调节槽内部滑动连接有紧固器,紧固器包括壳体,壳体一侧固定有第一转轴,第一转轴内圈固定有调节杆,调节杆外侧固定有若干传动杆,壳体两侧均开有通孔,通孔内部贯穿有移动杆,移动杆表面开有若干调节孔,移动杆一端固定有夹板。本发明通过紧固器的作用,该装置可以灵活的对夹板的位置进行调节,使该装置可以对不同规格的筒
支撑装置和用于塔筒的支撑设备.pdf
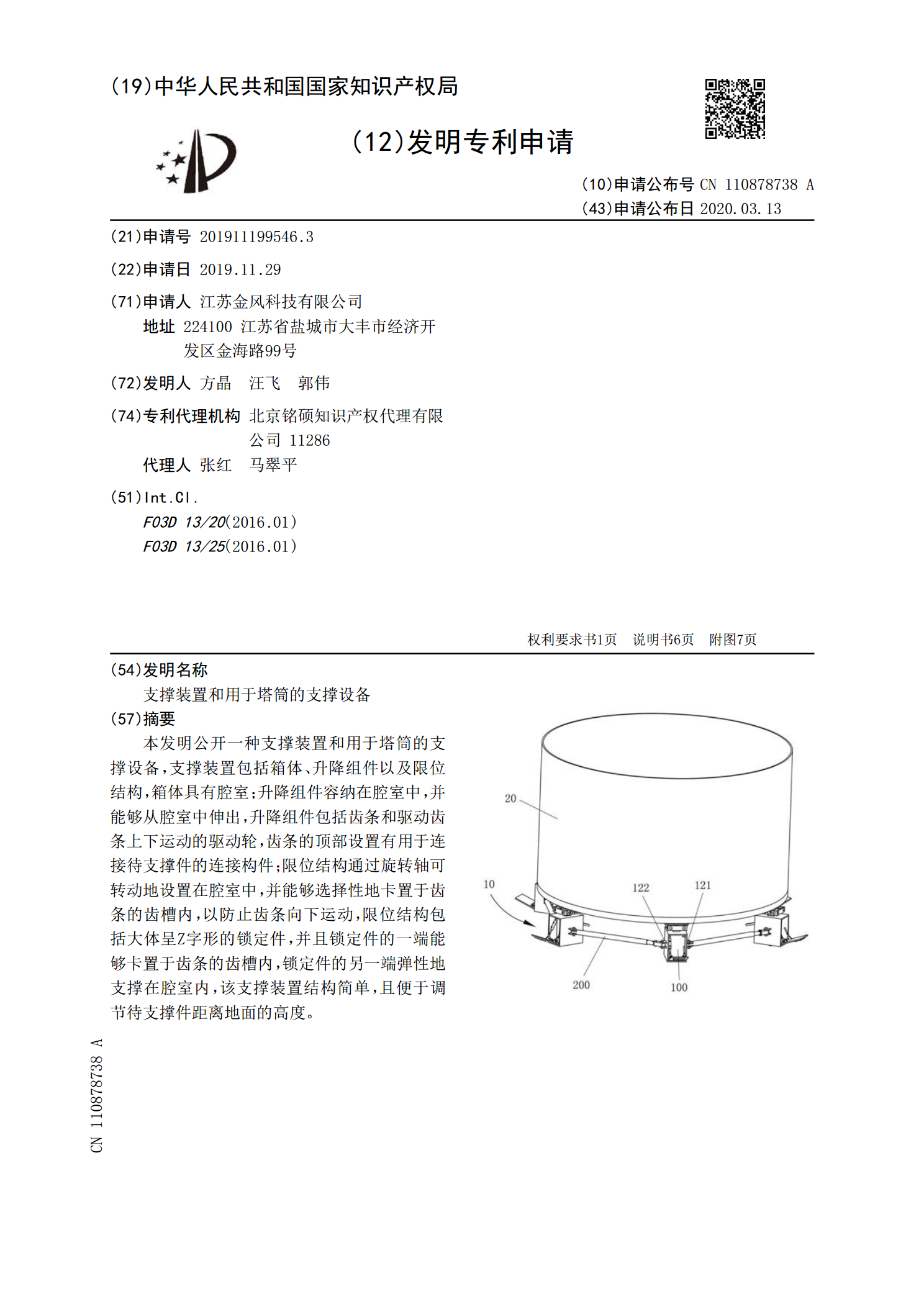
本发明公开一种支撑装置和用于塔筒的支撑设备,支撑装置包括箱体、升降组件以及限位结构,箱体具有腔室;升降组件容纳在腔室中,并能够从腔室中伸出,升降组件包括齿条和驱动齿条上下运动的驱动轮,齿条的顶部设置有用于连接待支撑件的连接构件;限位结构通过旋转轴可转动地设置在腔室中,并能够选择性地卡置于齿条的齿槽内,以防止齿条向下运动,限位结构包括大体呈Z字形的锁定件,并且锁定件的一端能够卡置于齿条的齿槽内,锁定件的另一端弹性地支撑在腔室内,该支撑装置结构简单,且便于调节待支撑件距离地面的高度。

大型筒体加工可拆卸组合支撑装置.pdf
大型筒体加工可拆卸组合支撑装置属于大型回转设备球磨机筒体的辅助加工设备技术领域。本发明提供了一种大型筒体加工可拆卸组合支撑装置,该组合支撑装置在试验生产中,使用效果良好,为高质量、高效率、低成本的筒体加工提供了技术保障。本发明包括可调节活支撑装置和圆度支撑装置,可调节活支撑装置是由可调节活支撑和可拆卸斜支撑构成,可拆卸斜支撑设置在相对的两个可调节活支撑之间;圆度支撑装置是由筒体圆度支撑架和筒口可调节活支撑构成,所述的筒口可调节活支撑有两个,分别设置在筒体的进料端和出料端,所述的筒体圆度支撑架位于两筒口可调
一种用于管道加工抬起支撑装置.pdf
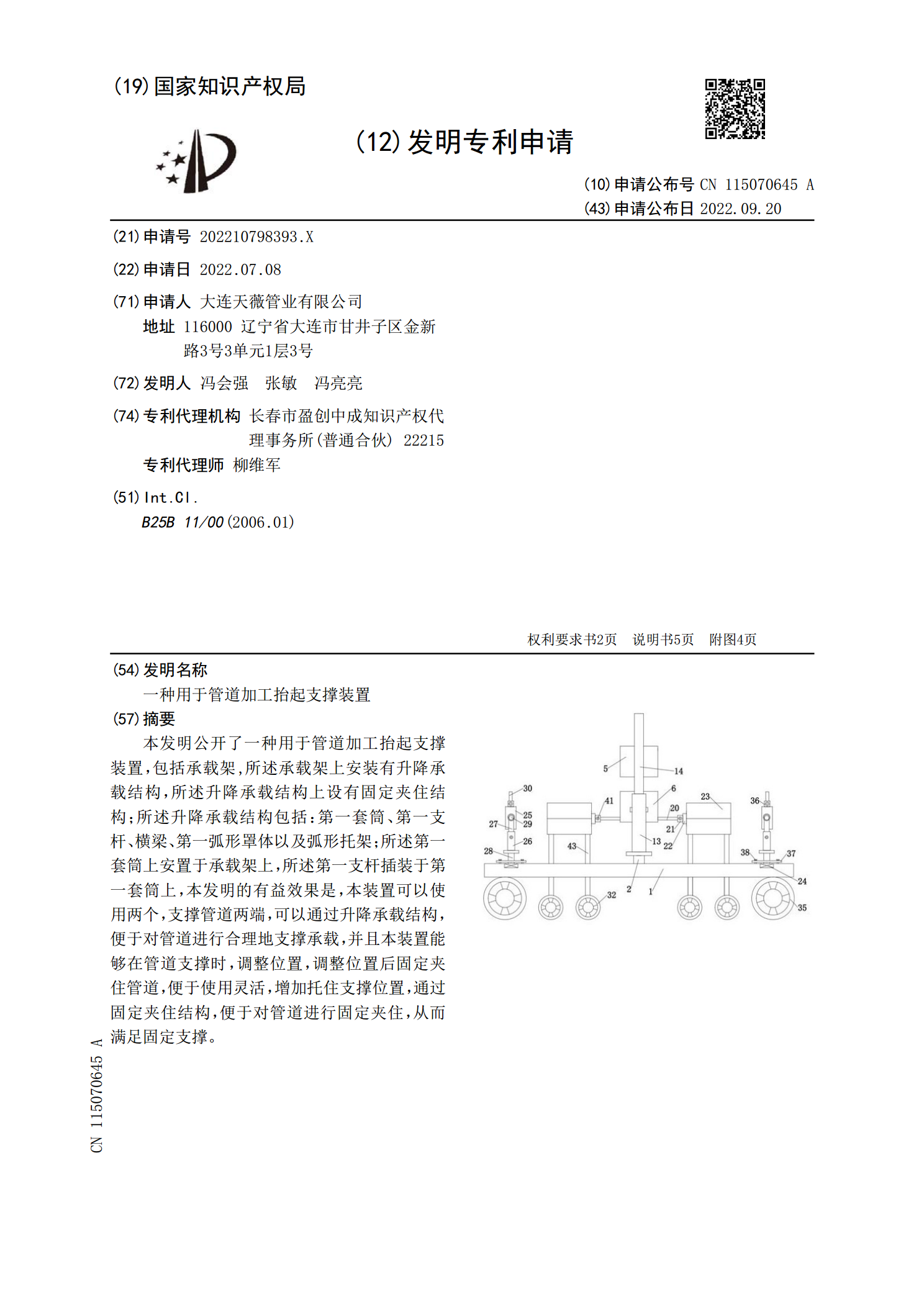
本发明公开了一种用于管道加工抬起支撑装置,包括承载架,所述承载架上安装有升降承载结构,所述升降承载结构上设有固定夹住结构;所述升降承载结构包括:第一套筒、第一支杆、横梁、第一弧形罩体以及弧形托架;所述第一套筒上安置于承载架上,所述第一支杆插装于第一套筒上,本发明的有益效果是,本装置可以使用两个,支撑管道两端,可以通过升降承载结构,便于对管道进行合理地支撑承载,并且本装置能够在管道支撑时,调整位置,调整位置后固定夹住管道,便于使用灵活,增加托住支撑位置,通过固定夹住结构,便于对管道进行固定夹住,从而满足固定