
自动上料机械手设计 13000.doc

An****99

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共43页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自动上料机械手设计 13000.doc
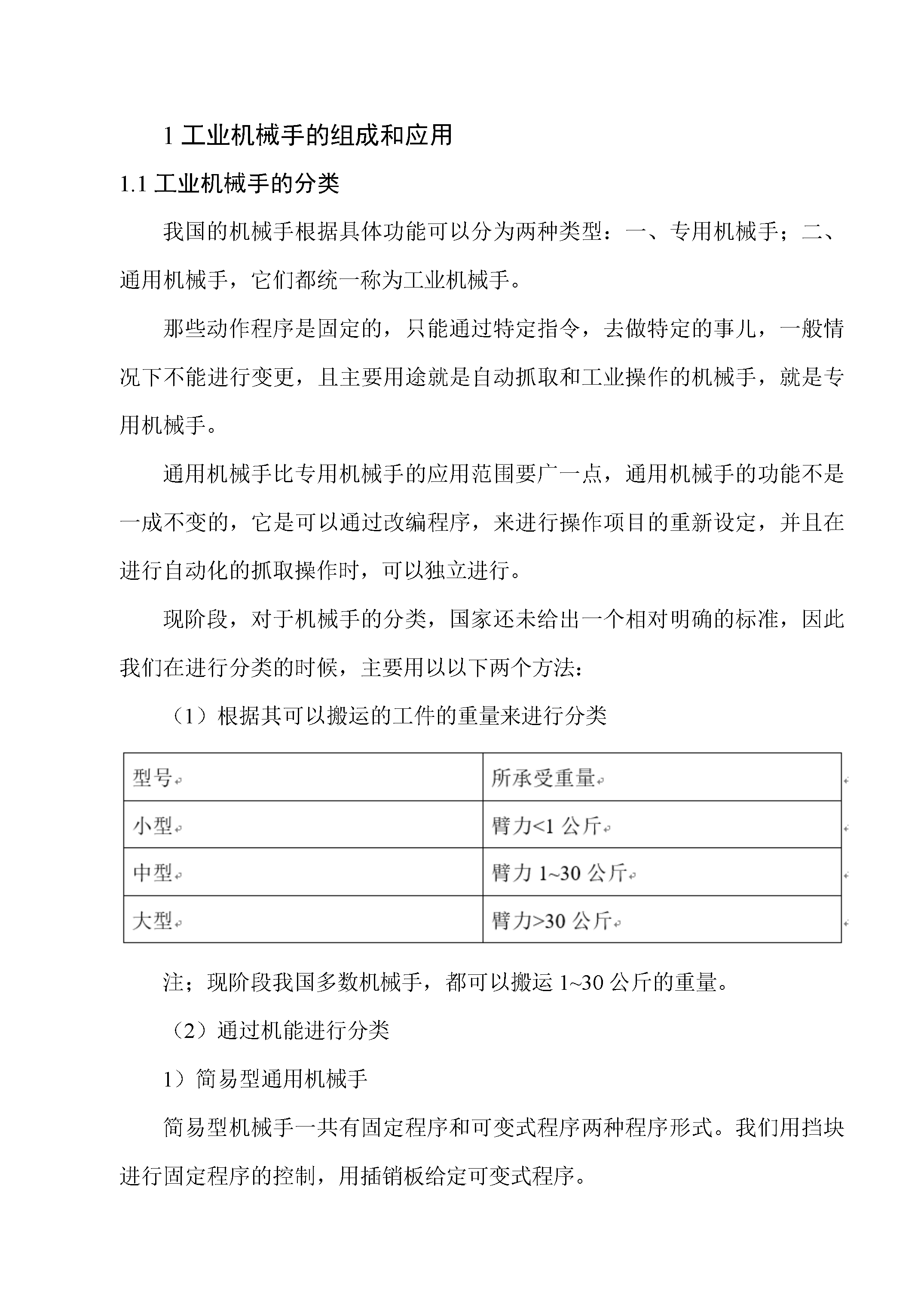
自动上料机械手设计摘要随着社会的不断进步,科技水平的不断发展,人们对时间的需求越来越大,所以在大规模的制造业中,通过人力来进行产品的生产,已经不足以支撑企业运转了,所以为了提高工作效率,同时也为了保证产品的质量,必须尽快实现机械自动化,这样一来,生产过程能不能自动化,已经成为了当前需要关注的首要问题。随着人力劳动的减少,工业机器人代替其站在了自动化生产线上,并且已经受到了多个企业的认可与采用。我们可以看出,在进行工业机器人的制造时,技术水平以及机器人成功后的应用频率,和国家工业自动化水平的高低,呈正相关趋

自动上料机械手设计 13000.doc
自动上料机械手设计摘要随着社会的不断进步,科技水平的不断发展,人们对时间的需求越来越大,所以在大规模的制造业中,通过人力来进行产品的生产,已经不足以支撑企业运转了,所以为了提高工作效率,同时也为了保证产品的质量,必须尽快实现机械自动化,这样一来,生产过程能不能自动化,已经成为了当前需要关注的首要问题。随着人力劳动的减少,工业机器人代替其站在了自动化生产线上,并且已经受到了多个企业的认可与采用。我们可以看出,在进行工业机器人的制造时,技术水平以及机器人成功后的应用频率,和国家工业自动化水平的高低,呈正相关趋
自动上料机械手设计 13000.doc
自动上料机械手设计摘要随着社会的不断进步,科技水平的不断发展,人们对时间的需求越来越大,所以在大规模的制造业中,通过人力来进行产品的生产,已经不足以支撑企业运转了,所以为了提高工作效率,同时也为了保证产品的质量,必须尽快实现机械自动化,这样一来,生产过程能不能自动化,已经成为了当前需要关注的首要问题。随着人力劳动的减少,工业机器人代替其站在了自动化生产线上,并且已经受到了多个企业的认可与采用。我们可以看出,在进行工业机器人的制造时,技术水平以及机器人成功后的应用频率,和国家工业自动化水平的高低,呈正相关趋
自动上料机械手设计 13000.doc
自动上料机械手设计摘要随着社会的不断进步,科技水平的不断发展,人们对时间的需求越来越大,所以在大规模的制造业中,通过人力来进行产品的生产,已经不足以支撑企业运转了,所以为了提高工作效率,同时也为了保证产品的质量,必须尽快实现机械自动化,这样一来,生产过程能不能自动化,已经成为了当前需要关注的首要问题。随着人力劳动的减少,工业机器人代替其站在了自动化生产线上,并且已经受到了多个企业的认可与采用。我们可以看出,在进行工业机器人的制造时,技术水平以及机器人成功后的应用频率,和国家工业自动化水平的高低,呈正相关趋

自动上料机械手设计 13000.doc
自动上料机械手设计摘要随着社会的不断进步科技水平的不断发展人们对时间的需求越来越大所以在大规模的制造业中通过人力来进行产品的生产已经不足以支撑企业运转了所以为了提高工作效率同时也为了保证产品的质量必须尽快实现机械自动化这样一来生产过程能不能自动化已经成为了当前需要关注的首要问题。随着人力劳动的减少工业机器人代替其站在了自动化生产线上并且已经受到了多个企业的认可与采用。我们可以看出在进行工业机器人的制造时技术水平以及机器人成功后的应用频率和国家工业自动化水平的高低呈正相关趋势。在一些高温、高压等人类无法