
一种对接锁驱动组合专用扭矩测量系统及原位校准方法.pdf

春波****公主


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种对接锁驱动组合专用扭矩测量系统及原位校准方法.pdf
本发明公开了一种对接锁驱动组合专用扭矩测量系统及原位校准方法,装置:包括上位机、扭矩精确加载模块、扭矩过载保护模块、扭矩测量模块、转矩转速传感器原位校准模块、扭矩传动模块、高低温环境控制器、支撑架以及实验平台。在校准中,利用标准传感器对于转矩转速传感器进行校准。在扭矩测量中,在各点温度下,记录下转矩转速传感器的测量值,比较扭矩设定值与转矩转速传感器的测量值,便可得到测量点下对接锁驱动组合扭矩输出,完成对接锁驱动组合的测试。本发明能够在无需拆卸转矩转速传感器的情况下对其校准,而且能够在‑70℃~100℃高低
一种丝杠联系组合专用扭矩测量装置及原位校准方法.pdf
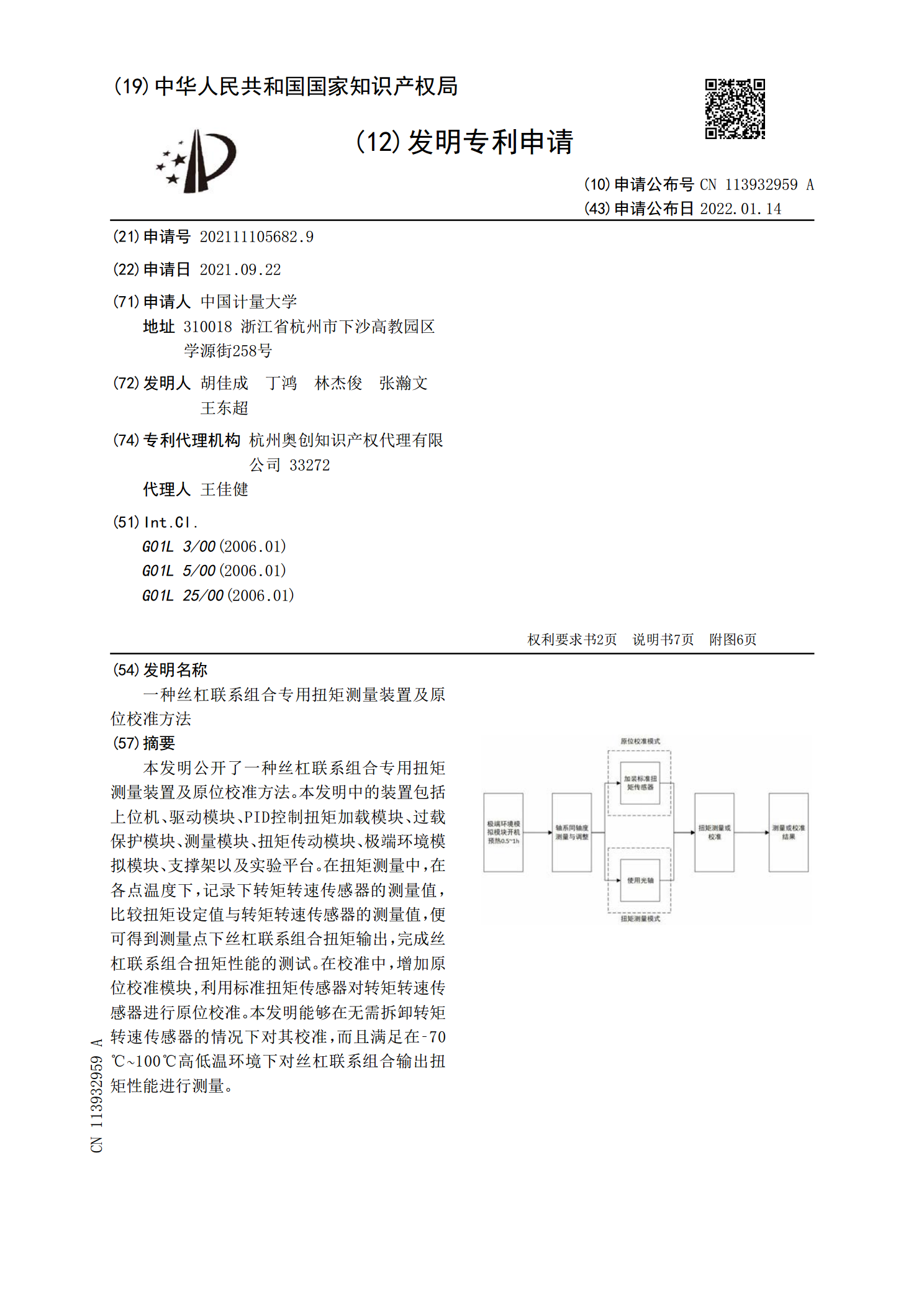
本发明公开了一种丝杠联系组合专用扭矩测量装置及原位校准方法。本发明中的装置包括上位机、驱动模块、PID控制扭矩加载模块、过载保护模块、测量模块、扭矩传动模块、极端环境模拟模块、支撑架以及实验平台。在扭矩测量中,在各点温度下,记录下转矩转速传感器的测量值,比较扭矩设定值与转矩转速传感器的测量值,便可得到测量点下丝杠联系组合扭矩输出,完成丝杠联系组合扭矩性能的测试。在校准中,增加原位校准模块,利用标准扭矩传感器对转矩转速传感器进行原位校准。本发明能够在无需拆卸转矩转速传感器的情况下对其校准,而且满足在‑70℃

差动组合专用扭矩测量装置及方法.pdf
本发明涉及一种差动组合专用扭矩测量装置及方法,该装置包括上位机、驱动模块、扭矩精确加载模块、扭矩过载保护模块、扭矩测量模块、转矩转速传感器原位校准模块、扭矩传动模块、高低温环境控制器、支撑架以及实验平台。在校准中,利用标准扭矩传感器对转矩转速传感器进行校准。在扭矩测量中,在各点温度下,记录下转矩转速传感器的测量值,比较扭矩设定值与转矩转速传感器的测量值,便可得到测量点下对接锁驱动组合扭矩输出,完成差动组合扭矩性能的测试。本发明能够在无需拆卸转矩转速传感器的情况下对其校准,而且能够在‑70℃~100℃高低温

工业测量系统现场精度原位校准装置及方法研究.docx
工业测量系统现场精度原位校准装置及方法研究工业测量系统现场精度原位校准装置及方法研究摘要:工业测量系统在工业生产中具有广泛应用,而精度是确保测量结果准确性的关键因素。为了保证工业测量系统准确度,在实际使用中需要进行校准。本论文着重研究了工业测量系统现场精度原位校准装置及方法,通过精度原位校准,提高了工业测量系统的精确度和可靠性。关键词:工业测量系统;精度原位校准;装置;方法;精确度;可靠性1.引言工业测量系统是工业生产中常用的一种技术工具,广泛应用于尺寸测量、形位公差检测、位置测量等领域。然而,由于工业生

工业测量系统现场精度原位校准装置及方法研究.pptx
工业测量系统现场精度原位校准装置及方法研究目录工业测量系统现场精度原位校准装置概述装置的组成和功能装置的工作原理装置的特点和优势工业测量系统现场精度原位校准方法研究方法的基本原理方法的实施步骤方法的应用范围和限制工业测量系统现场精度原位校准装置的设计与实现装置的设计方案装置的实现过程装置的测试和验证工业测量系统现场精度原位校准装置的应用场景和效果应用场景的描述和分析装置的应用效果评估装置的推广价值和意义工业测量系统现场精度原位校准装置的改进和发展方向装置的不足之处和改进建议装置的发展趋势和未来展望进一步研