
一种基于视觉导航的无人驾驶马蹄采收机.pdf

fa****楠吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于视觉导航的无人驾驶马蹄采收机.pdf
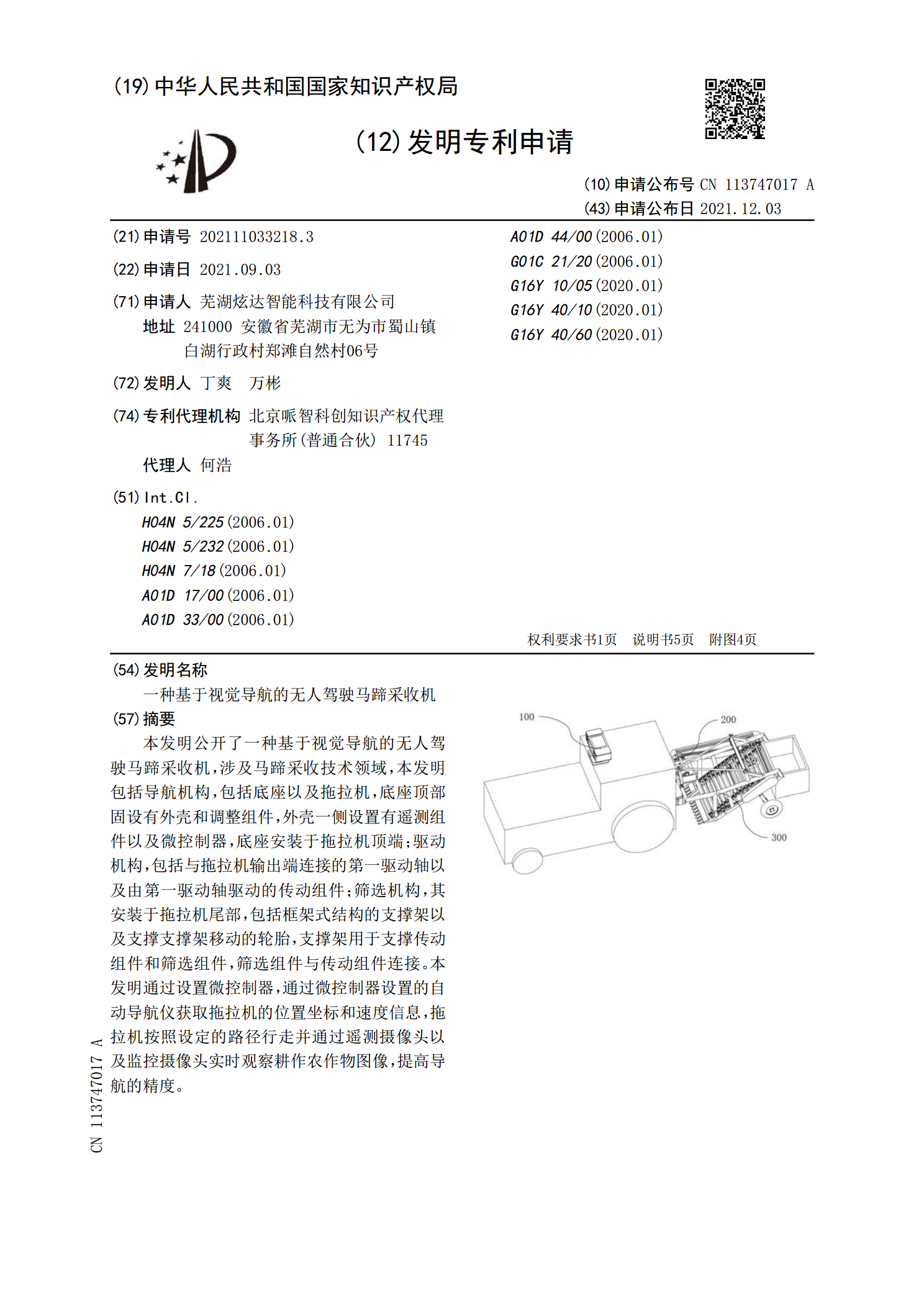
本发明公开了一种基于视觉导航的无人驾驶马蹄采收机,涉及马蹄采收技术领域,本发明包括导航机构,包括底座以及拖拉机,底座顶部固设有外壳和调整组件,外壳一侧设置有遥测组件以及微控制器,底座安装于拖拉机顶端;驱动机构,包括与拖拉机输出端连接的第一驱动轴以及由第一驱动轴驱动的传动组件;筛选机构,其安装于拖拉机尾部,包括框架式结构的支撑架以及支撑支撑架移动的轮胎,支撑架用于支撑传动组件和筛选组件,筛选组件与传动组件连接。本发明通过设置微控制器,通过微控制器设置的自动导航仪获取拖拉机的位置坐标和速度信息,拖拉机按照设定

一种基于视觉导航的水田农用底盘无人驾驶系统.pdf
本发明公开了一种基于视觉导航的水田农用底盘无人驾驶系统,包括摄像头、PC端、上位机和下位机;摄像头与上位机相连,用于查看实时画面;PC端作为上位机的显示器,显示摄像头传输过来的界面;上位机集成有一个目标跟踪模块,并通过串口与下位机相连;下位机从上位机接收到的指令控制水田农用底盘;目标跟踪模块是实现水田农用底盘自主导航作业的控制决策核心,其能够框选出目标物,再根据目标矩形框与摄像头的视野正中心作差,得到偏移量的正负,最后利用PID算法根据偏移量的正负来控制水田农用底盘的电动方向盘,且当目标物跟踪失败时,控制

环挖式马蹄笋采收机.pdf
本发明涉及农业机械技术领域,尤其为环挖式马蹄笋采收机,包括具有履带的机身、发动机、升降装置以及环挖式机构,发动机输出轴与履带的转动轴传动连接,所述升降装置安装在机身上,所述第一支杆的顶端固定有第二支杆,在第二支杆上安装有第三支杆以及与电磁阀连接的液压马达,所述第三支杆上安装有用于驱动切割的液压缸,且液压缸的顶杆上安装有用于切割马蹄笋的刀具,所述液压马达通过旋转驱动机构连接有用于清理覆盖马蹄笋泥土的环挖式机构,位于该环挖式机构上部的旋转驱动机构上设置有调节板,还包括与发动机、电磁阀以及液压马达连接的控制器。

一种基于视觉监控以及自动导航的割草机.pdf
一种基于视觉监控以及自动导航的割草机,包括机架、割草盘和万向轮,万向轮安装在机架底部,所述割草机还包括驱动轮、标记磁钉、电磁感应器和摄像头,所述机架包括底盘支架、顶盖和侧盖,所述侧盖位于底盘支架与顶盖之间,所述割草盘安装在所述底盘支架底部,所述万向轮和驱动轮分别位于底盘支架底部,所述驱动轮与驱动装置连接,所述电磁感应器安装在底盘支架上,所述电磁感应器与用于确定割草边界的标记磁钉配合,所述摄像头分别固定在所述侧盖的前端和后端,所述摄像头、电磁感应器和驱动装置的控制开关均与用于实现导航和监控的自动控制器连接。
一种无人驾驶联合收割机视觉导航系统.pdf
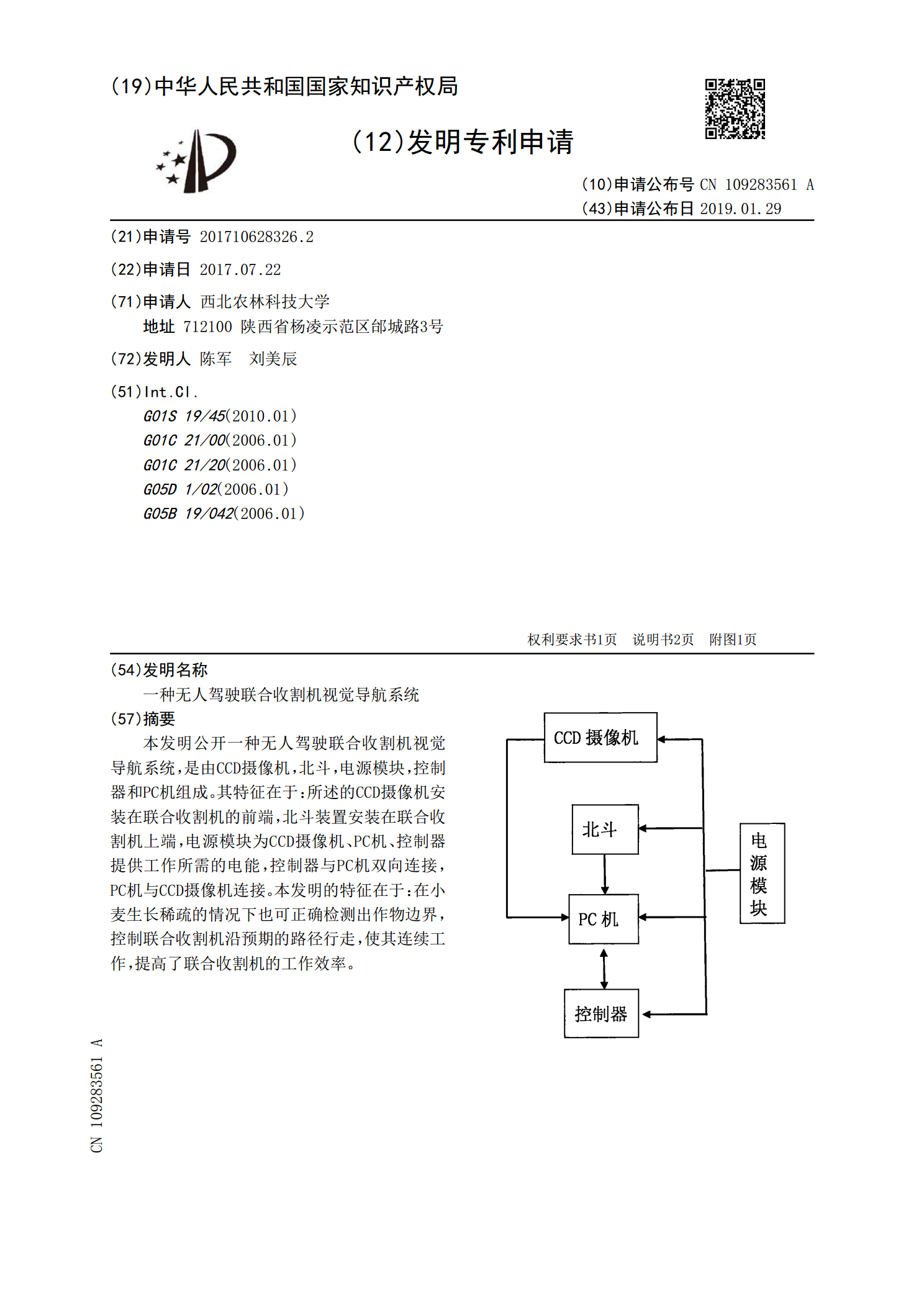
本发明公开一种无人驾驶联合收割机视觉导航系统,是由CCD摄像机,北斗,电源模块,控制器和PC机组成。其特征在于:所述的CCD摄像机安装在联合收割机的前端,北斗装置安装在联合收割机上端,电源模块为CCD摄像机、PC机、控制器提供工作所需的电能,控制器与PC机双向连接,PC机与CCD摄像机连接。本发明的特征在于:在小麦生长稀疏的情况下也可正确检测出作物边界,控制联合收割机沿预期的路径行走,使其连续工作,提高了联合收割机的工作效率。