
一种三坐标测量机及标定方法.pdf

春波****公主


1/9

2/9

3/9
4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种三坐标测量机及标定方法.pdf
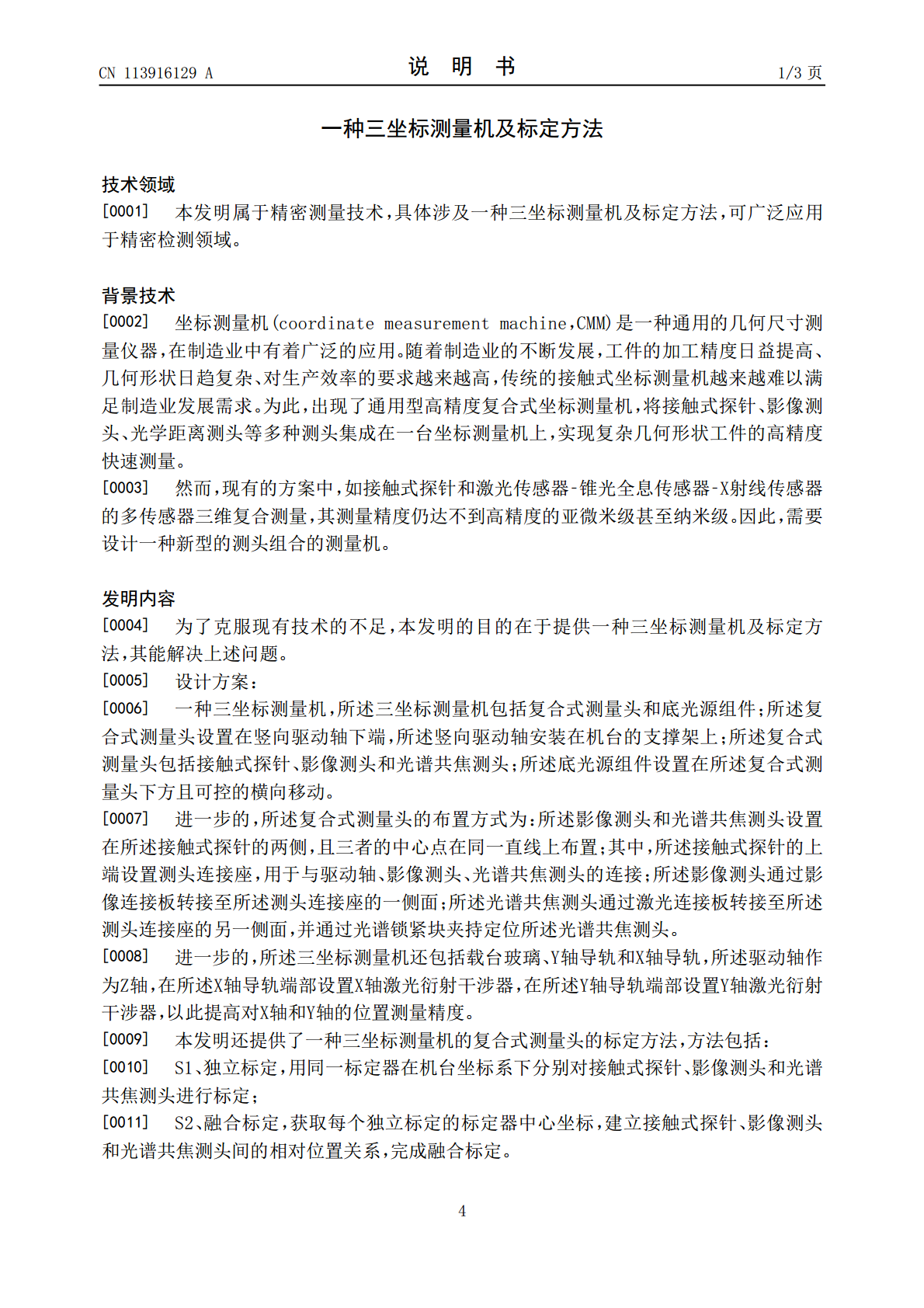
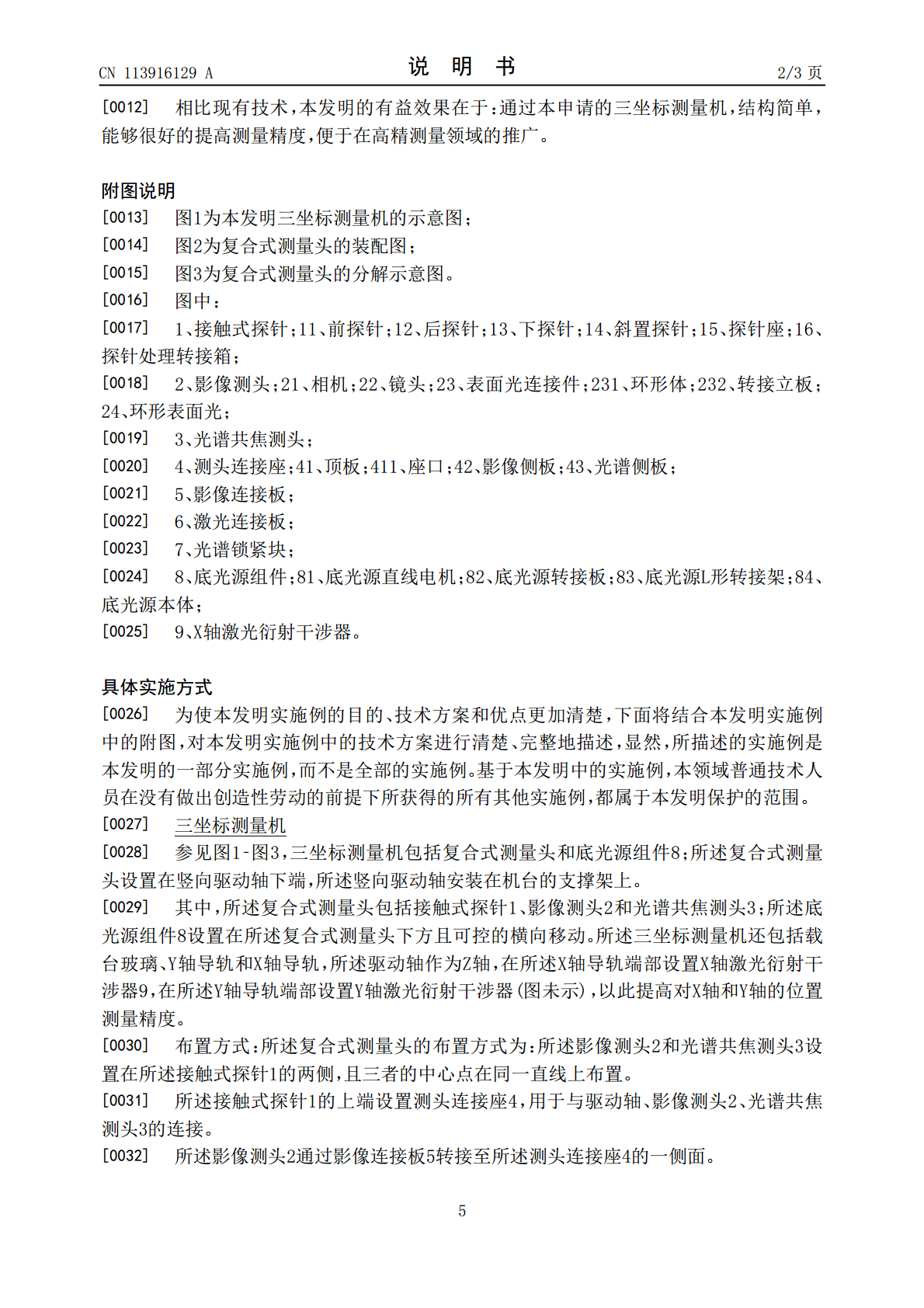
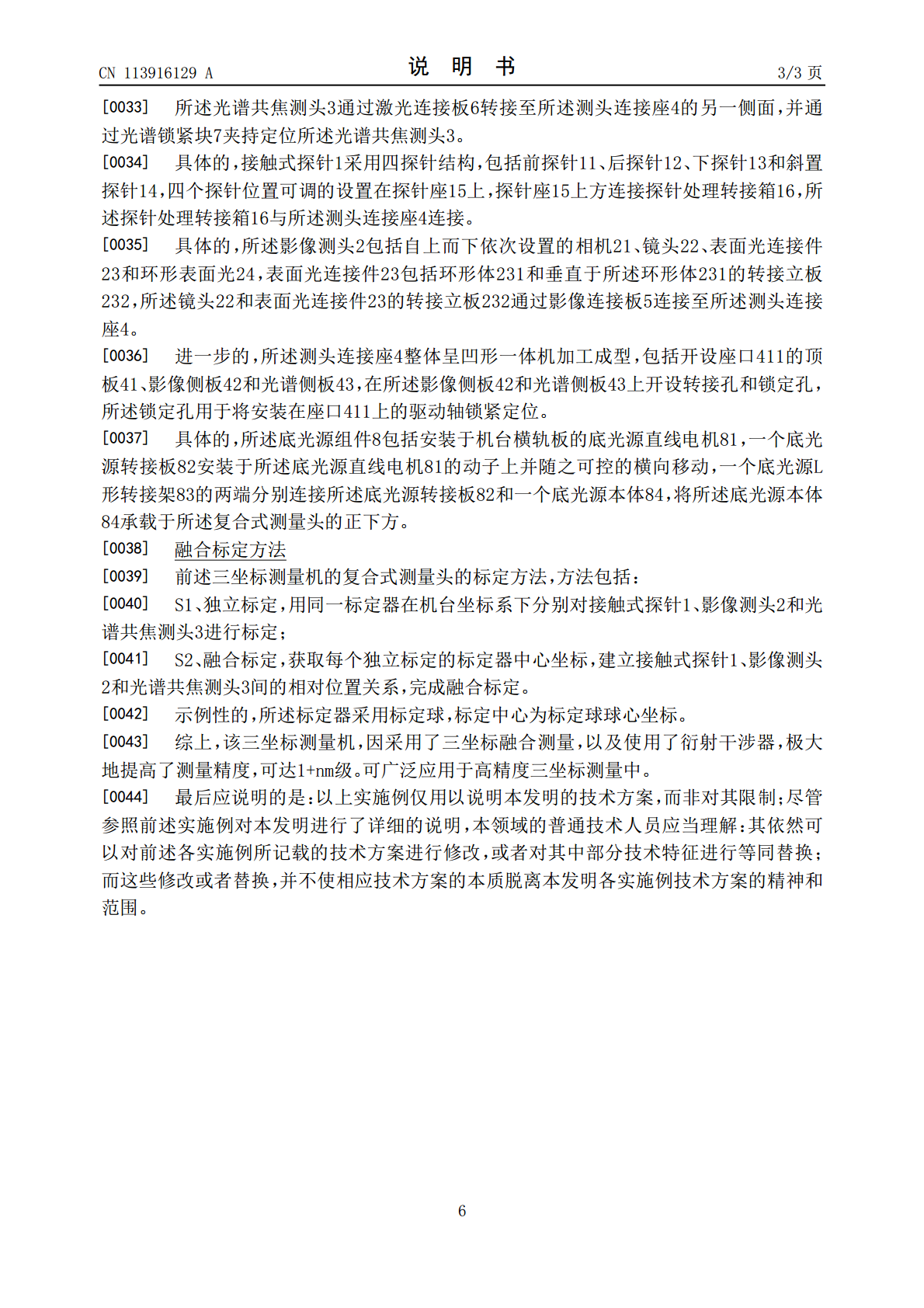
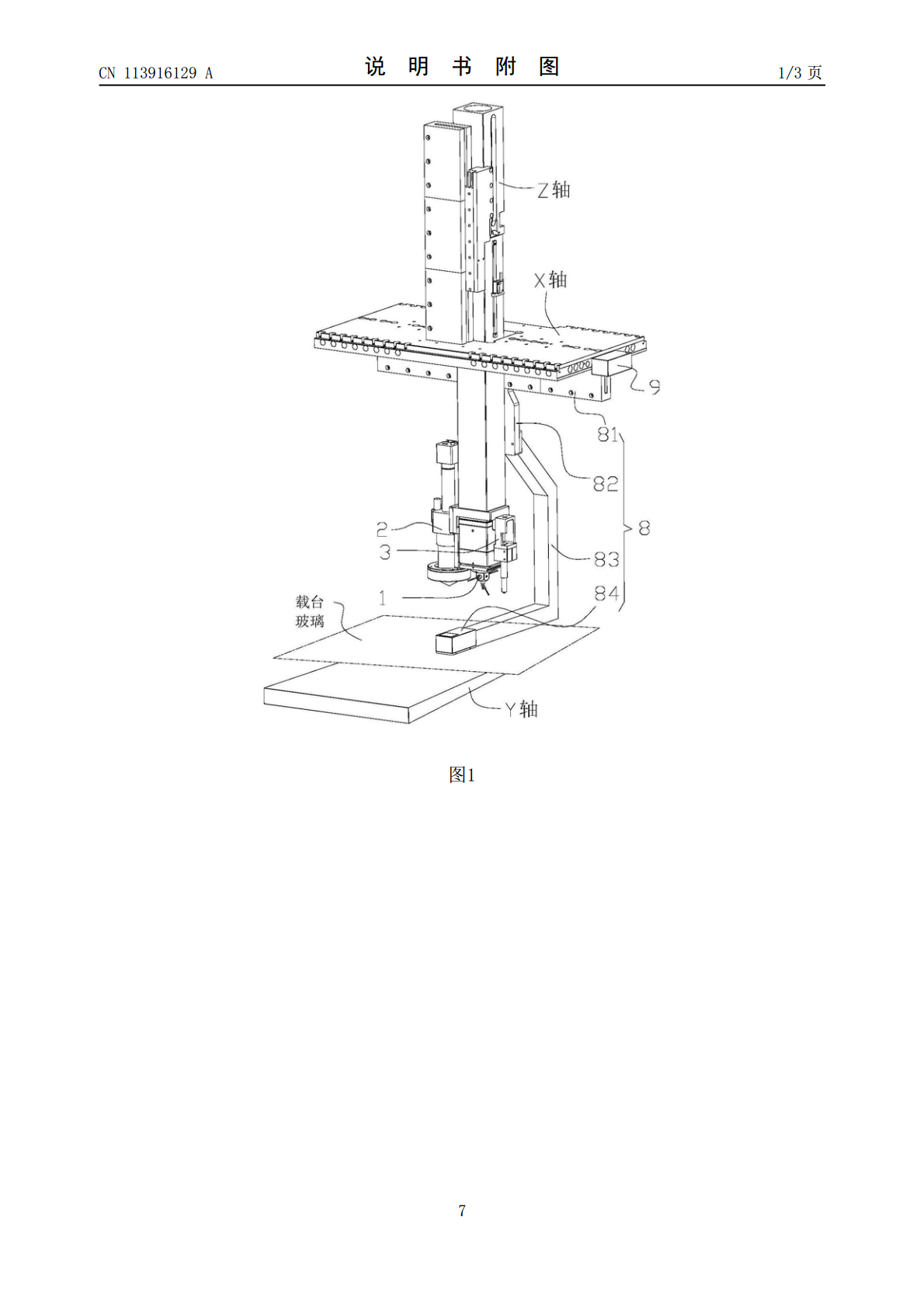
本发明提供了一种三坐标测量机及标定方法,属于精密测量领域,三坐标测量机包括复合式测量头和底光源组件;所述复合式测量头设置在竖向驱动轴下端,所述竖向驱动轴安装在机台的支撑架上;所述复合式测量头包括接触式探针、影像测头和光谱共焦测头;所述底光源组件设置在所述复合式测量头下方且可控的横向移动。X/Y驱动轴端部设置衍射干涉器。测量头需融合标定。通过本申请的三坐标测量机,结构简单,能够很好的提高测量精度,便于在高精测量领域的推广。
一种大尺寸关节臂式坐标测量机的标定方法.pdf
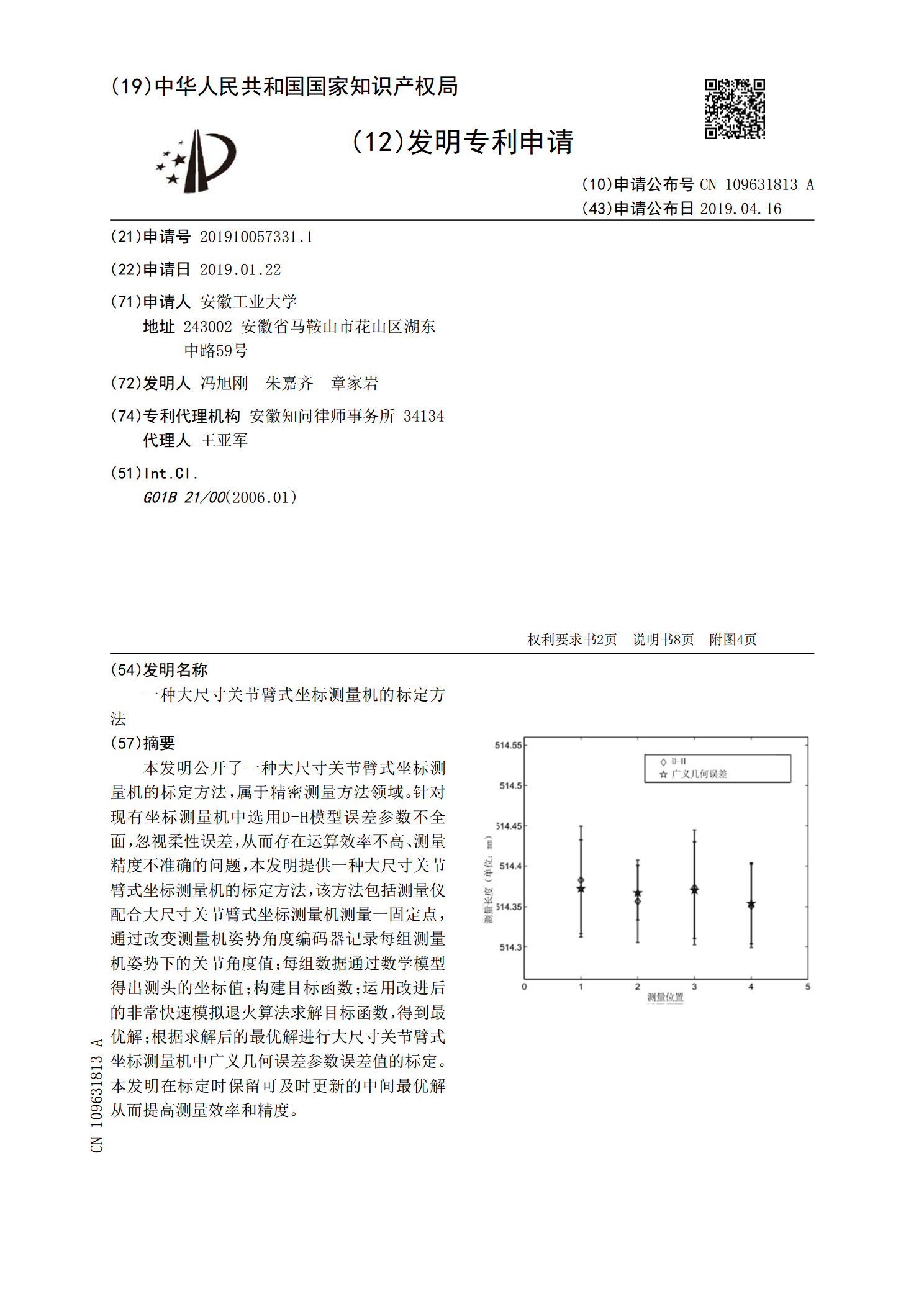
本发明公开了一种大尺寸关节臂式坐标测量机的标定方法,属于精密测量方法领域。针对现有坐标测量机中选用D‑H模型误差参数不全面,忽视柔性误差,从而存在运算效率不高、测量精度不准确的问题,本发明提供一种大尺寸关节臂式坐标测量机的标定方法,该方法包括测量仪配合大尺寸关节臂式坐标测量机测量一固定点,通过改变测量机姿势角度编码器记录每组测量机姿势下的关节角度值;每组数据通过数学模型得出测头的坐标值;构建目标函数;运用改进后的非常快速模拟退火算法求解目标函数,得到最优解;根据求解后的最优解进行大尺寸关节臂式坐标测量机中

基于三坐标测量机的立方镜标定精度分析.docx
基于三坐标测量机的立方镜标定精度分析立方镜是一种用于三坐标测量机标定的重要工具,能够提供高精度和高稳定性的测量结果。本文旨在对立方镜标定的精度进行分析,并探讨其在实际应用中的意义和影响因素。通过对标定过程和实验结果的综合分析,可以进一步了解立方镜的准确性和可靠性,为三坐标测量机的精度提高和质量控制提供有效建议。首先,我们需要了解立方镜的工作原理。立方镜是由三个互相垂直的反射面构成,其表面平整度和平面度要求非常高。当光线通过立方镜时,由于反射作用,光线会改变方向并返回原来的路径。由此可知,立方镜的标定关键在

坐标测量机标准球原理及测头标定方法研究.docx
坐标测量机标准球原理及测头标定方法研究【摘要】坐标测量机是一种常用的用于测量工件三维形状和位置误差的精密测量设备,而标准球和测头则是坐标测量机常用的测量工具。本文主要研究了坐标测量机标准球的原理以及测头的标定方法。首先介绍了坐标测量机的基本原理和结构,然后详细介绍了标准球的特点、原理和使用方法,包括标准球的制造工艺、标准球直径的选择以及标准球与坐标系的配合;最后探讨了测头的标定方法,包括球差标定、角差标定和比例差标定。研究结果表明,通过使用标准球和合适的标定方法可以提高坐标测量机的测量精度和可靠性,从而满

并联坐标测量机误差分析与参数标定.pptx
并联坐标测量机误差分析与参数标定目录添加目录项标题并联坐标测量机误差分析误差来源误差分类误差传递与合成误差对测量精度的影响并联坐标测量机参数标定参数标定目的参数标定方法参数标定实验设计参数标定结果分析误差补偿技术误差补偿原理误差补偿算法误差补偿实验验证误差补偿效果评估并联坐标测量机性能测试与评估性能测试内容与方法测试结果分析测量精度评估与传统测量机的比较分析结论与展望研究成果总结对并联坐标测量机发展的影响对未来研究的建议与展望感谢观看