
一种蔬菜种植用无土栽培装置.pdf

是秋****写意

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种蔬菜种植用无土栽培装置.pdf
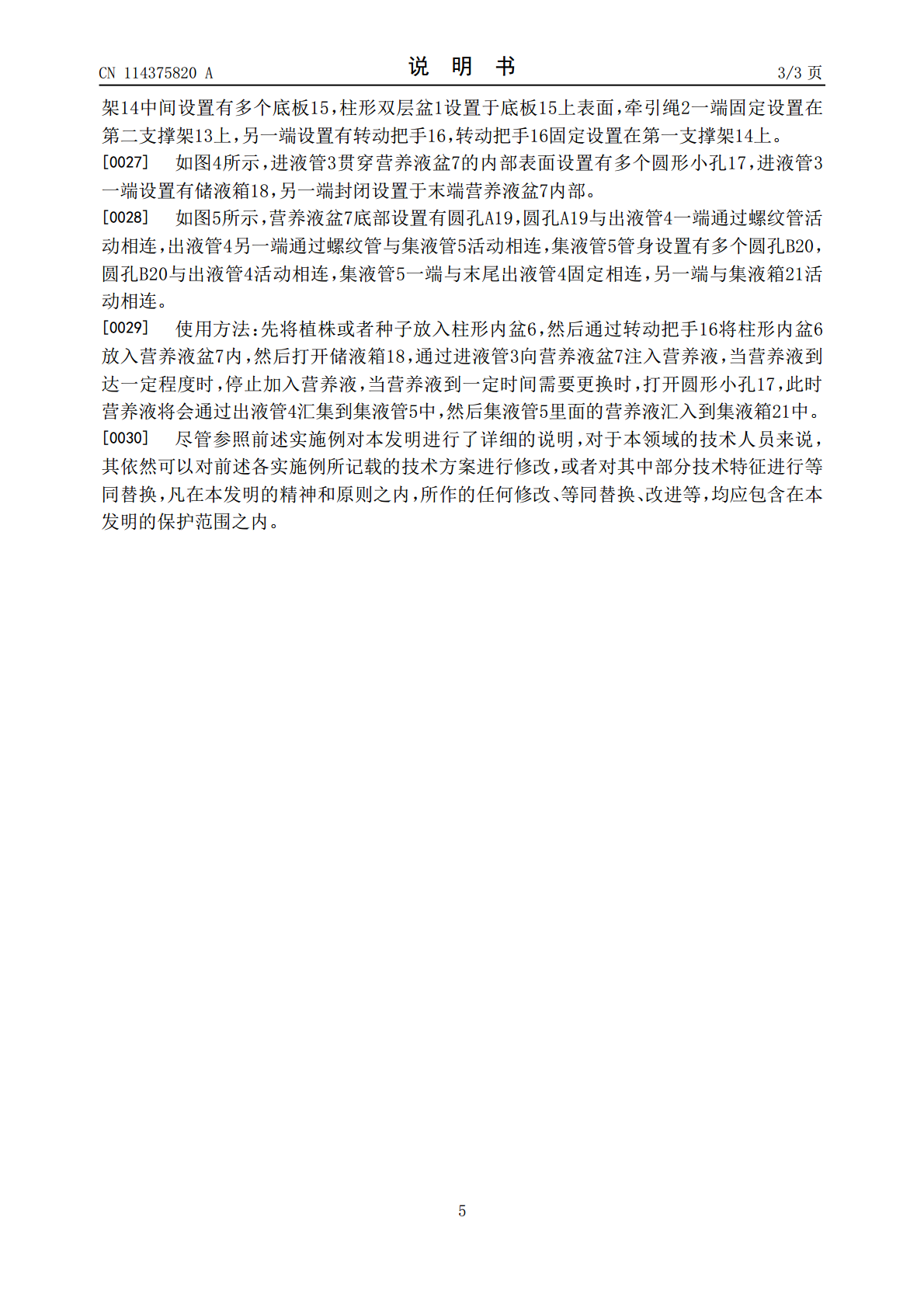
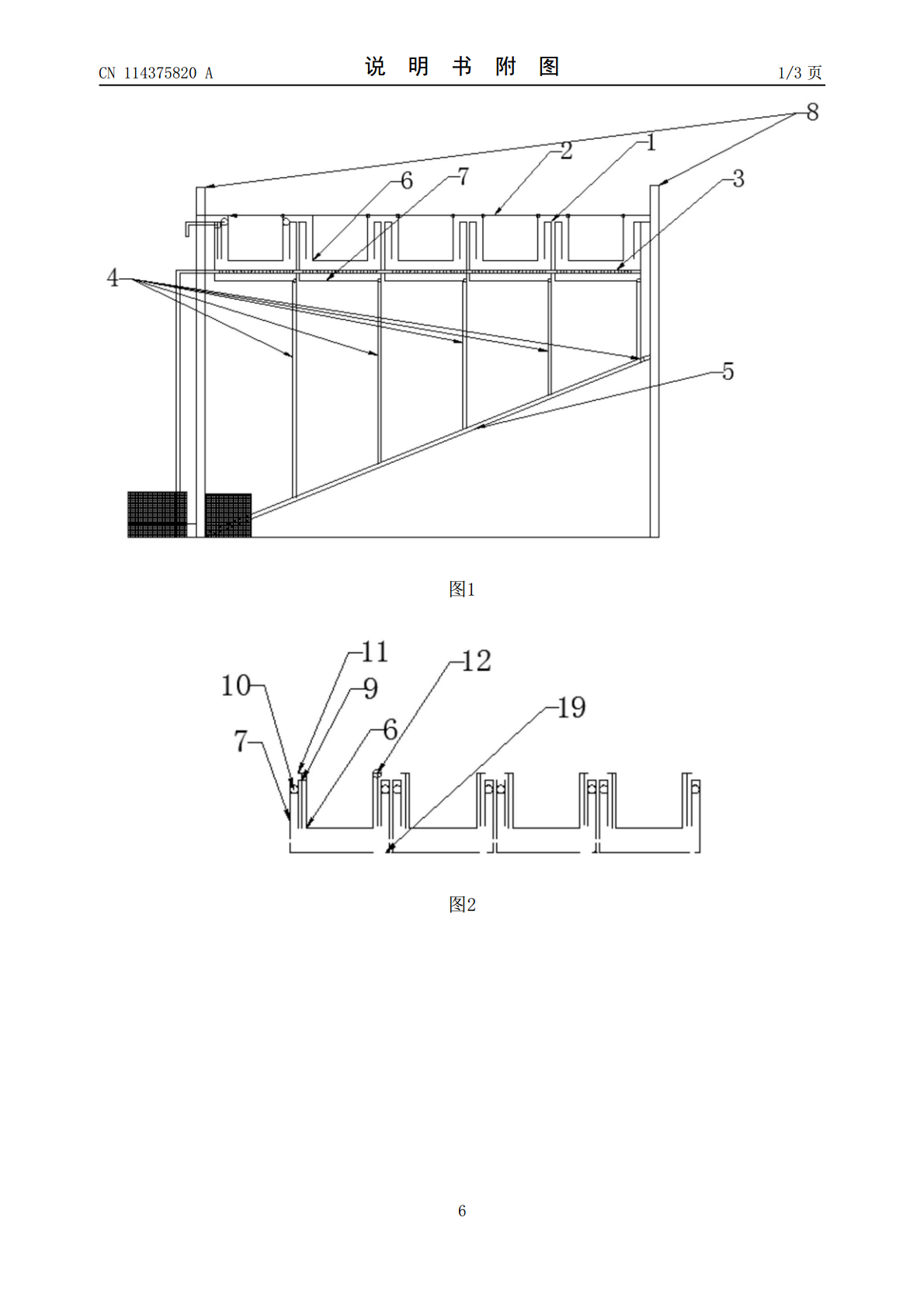
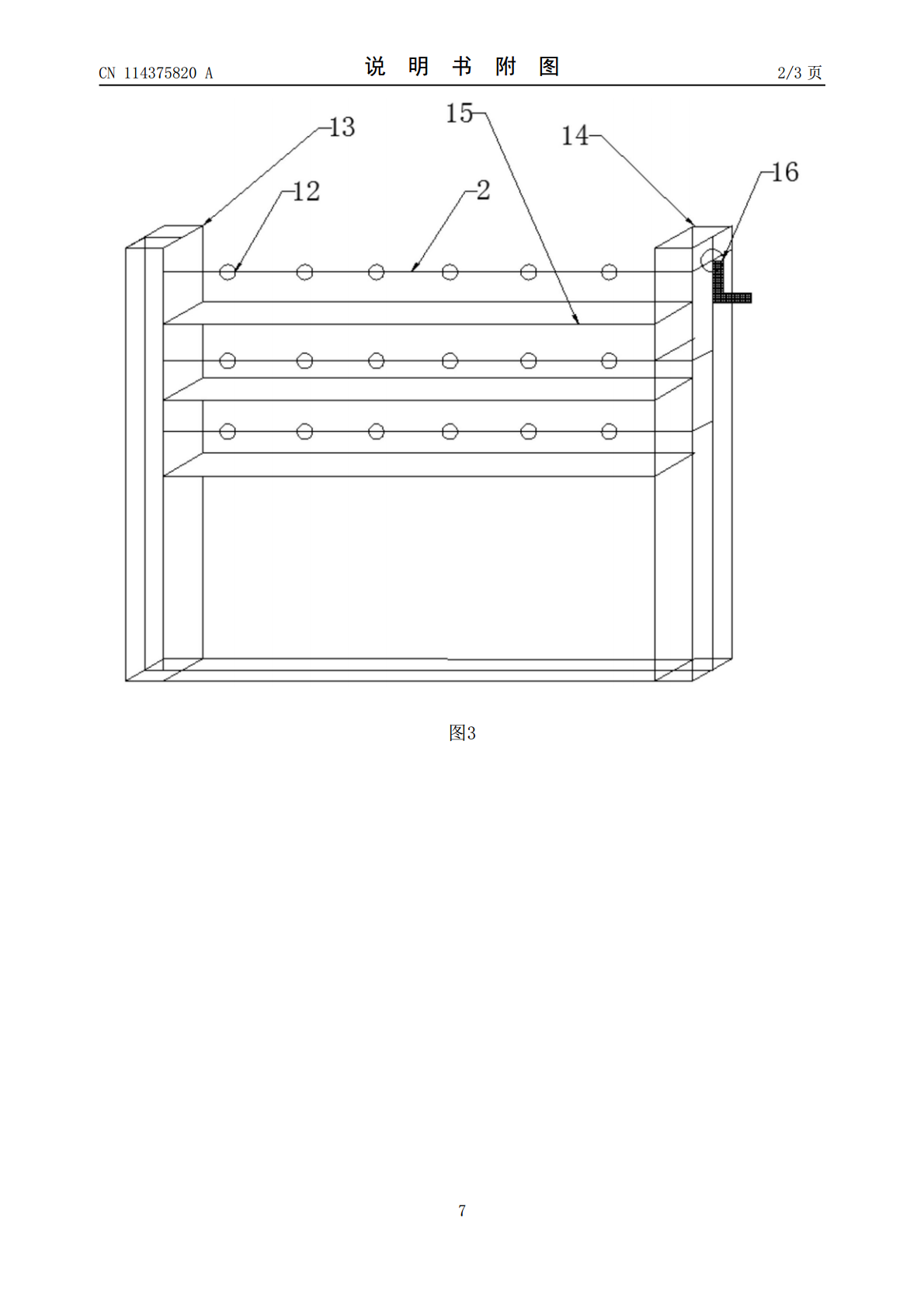
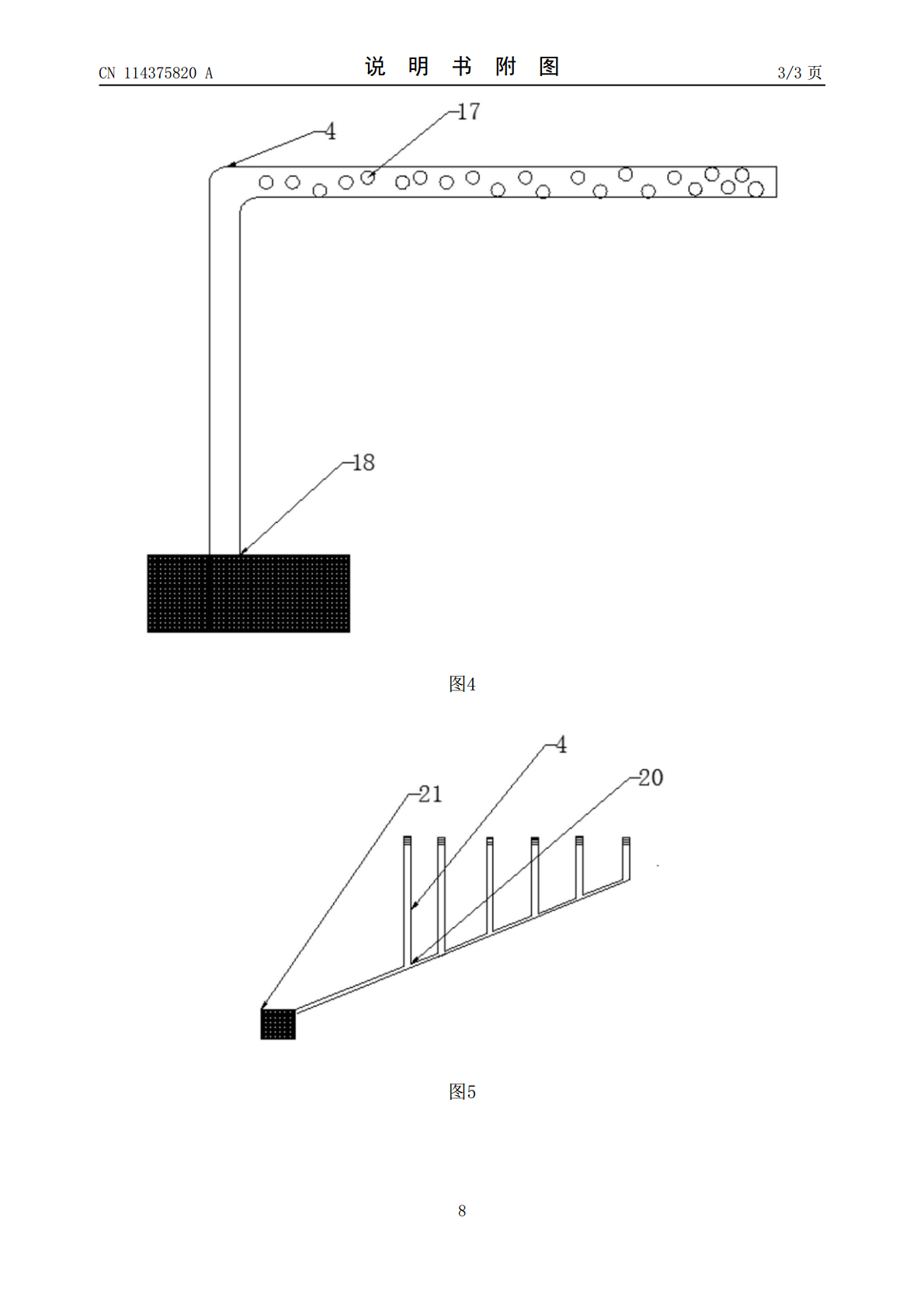
本发明公开了一种蔬菜种植用无土栽培装置,双层柱形盆内部活动设置有柱形内盆,双层柱形盆外部设置为营养液盆,营养液盆与柱形内盆活动相连,牵引绳活动设置在柱形内盆盆口处,进液管贯穿营养液盆内部设置在柱形内盆下方,出液管一端与营养液盆底部相连,出液管另一端与集液管相连,双层柱形盆两端设置有相同的支撑架,集液管倾斜一定角度设置于两个支撑架之间,该发明结构合理,操作方便,易于观察植株的整体情况以及营养液的使用情况,省时省力,具有较好的使用效果。
蔬菜种植用无土栽培装置及系统.pdf
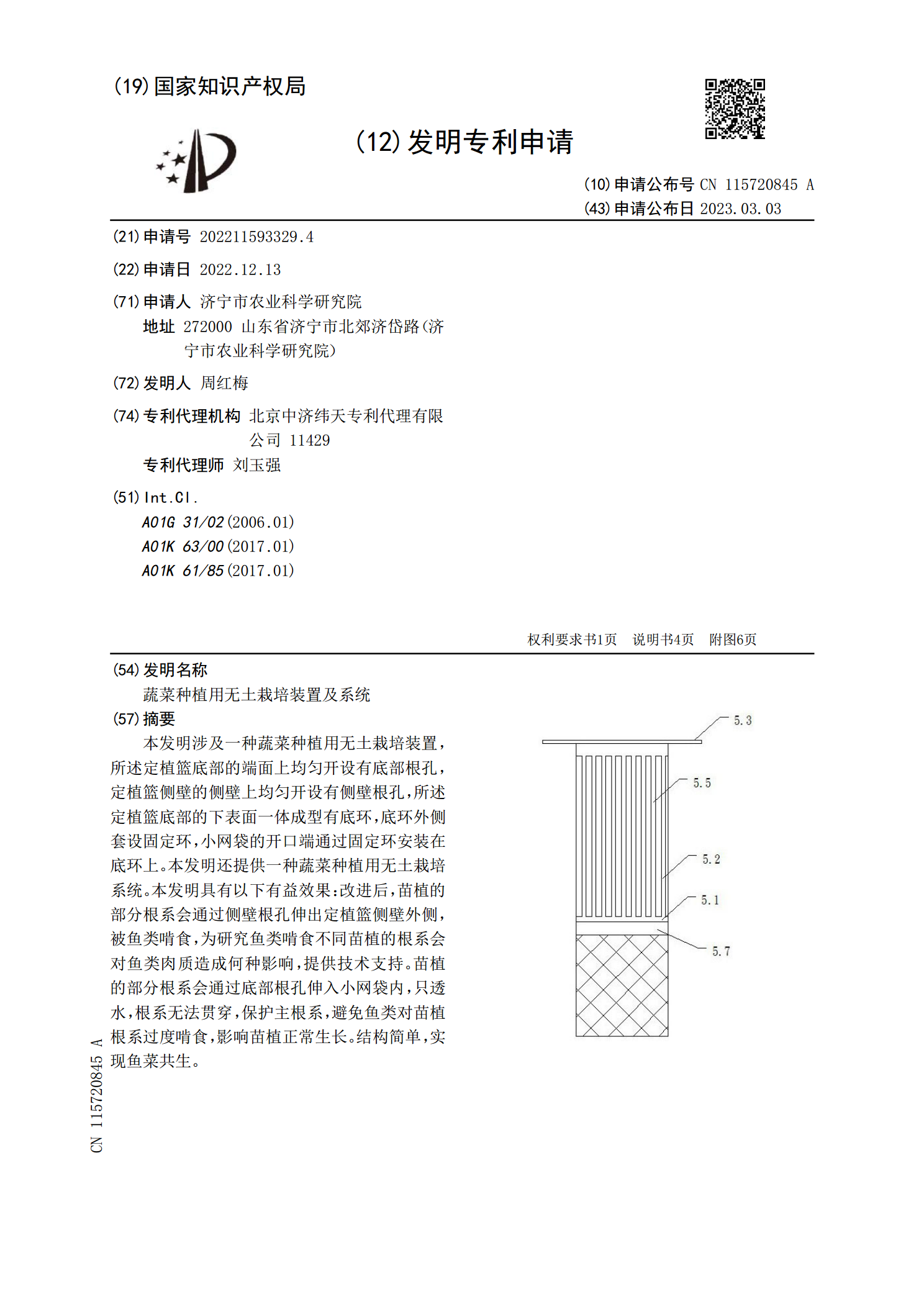
本发明涉及一种蔬菜种植用无土栽培装置,所述定植篮底部的端面上均匀开设有底部根孔,定植篮侧壁的侧壁上均匀开设有侧壁根孔,所述定植篮底部的下表面一体成型有底环,底环外侧套设固定环,小网袋的开口端通过固定环安装在底环上。本发明还提供一种蔬菜种植用无土栽培系统。本发明具有以下有益效果:改进后,苗植的部分根系会通过侧壁根孔伸出定植篮侧壁外侧,被鱼类啃食,为研究鱼类啃食不同苗植的根系会对鱼类肉质造成何种影响,提供技术支持。苗植的部分根系会通过底部根孔伸入小网袋内,只透水,根系无法贯穿,保护主根系,避免鱼类对苗植根系过
一种无土栽培蔬菜种植装置.pdf
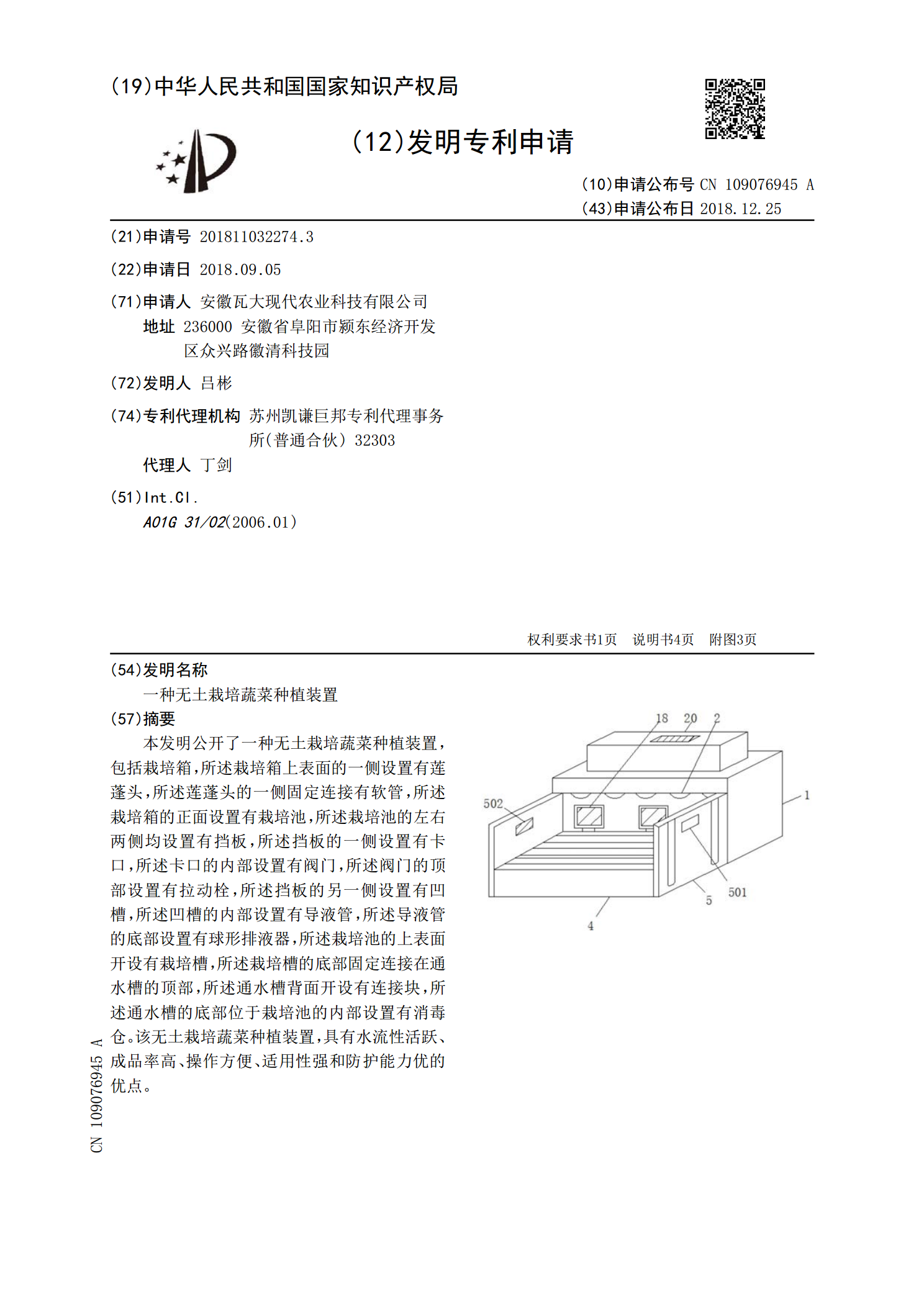
本发明公开了一种无土栽培蔬菜种植装置,包括栽培箱,所述栽培箱上表面的一侧设置有莲蓬头,所述莲蓬头的一侧固定连接有软管,所述栽培箱的正面设置有栽培池,所述栽培池的左右两侧均设置有挡板,所述挡板的一侧设置有卡口,所述卡口的内部设置有阀门,所述阀门的顶部设置有拉动栓,所述挡板的另一侧设置有凹槽,所述凹槽的内部设置有导液管,所述导液管的底部设置有球形排液器,所述栽培池的上表面开设有栽培槽,所述栽培槽的底部固定连接在通水槽的顶部,所述通水槽背面开设有连接块,所述通水槽的底部位于栽培池的内部设置有消毒仓。该无土栽培蔬
一种无土栽培蔬菜种植装置.pdf
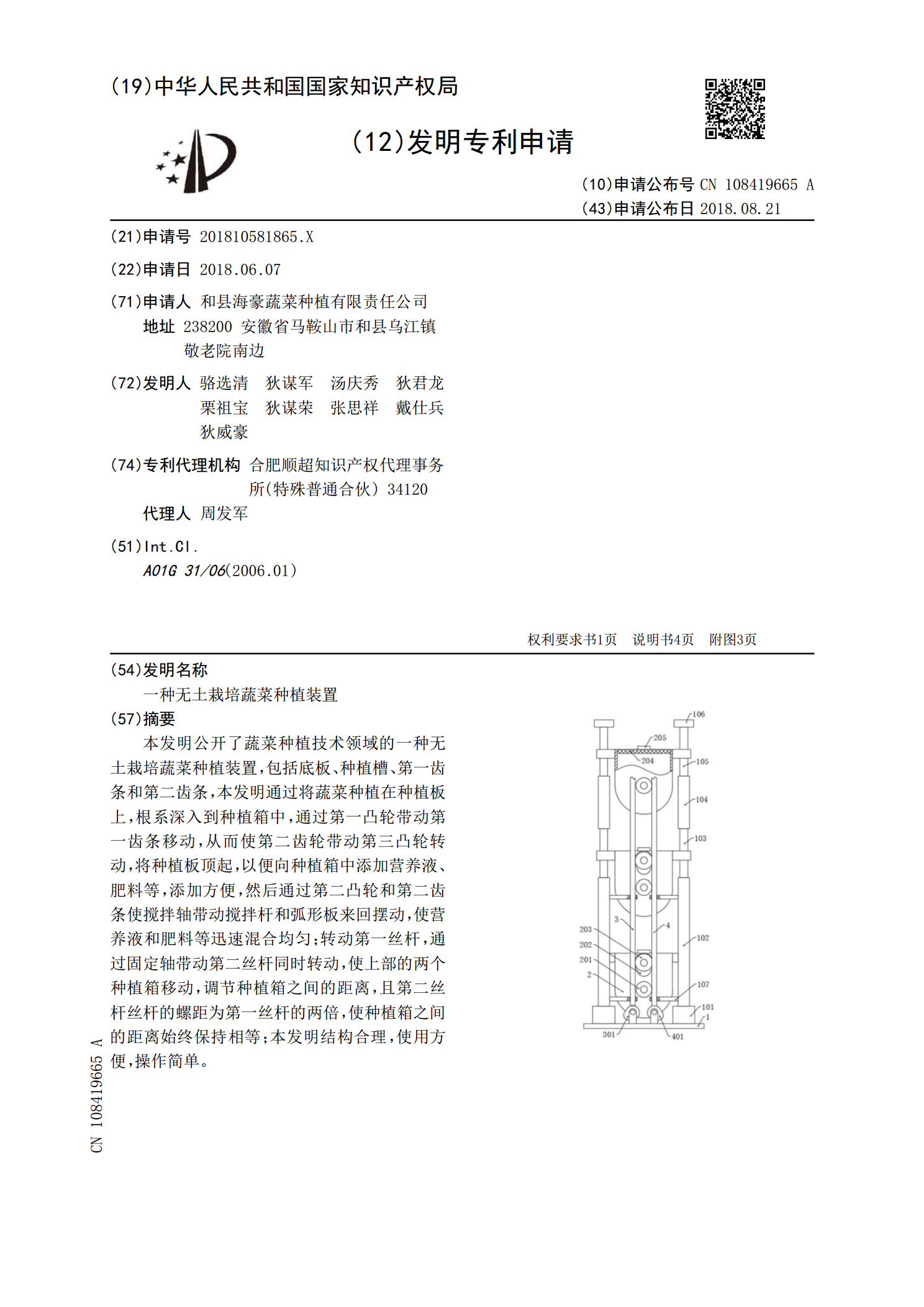
本发明公开了蔬菜种植技术领域的一种无土栽培蔬菜种植装置,包括底板、种植槽、第一齿条和第二齿条,本发明通过将蔬菜种植在种植板上,根系深入到种植箱中,通过第一凸轮带动第一齿条移动,从而使第二齿轮带动第三凸轮转动,将种植板顶起,以便向种植箱中添加营养液、肥料等,添加方便,然后通过第二凸轮和第二齿条使搅拌轴带动搅拌杆和弧形板来回摆动,使营养液和肥料等迅速混合均匀;转动第一丝杆,通过固定轴带动第二丝杆同时转动,使上部的两个种植箱移动,调节种植箱之间的距离,且第二丝杆丝杆的螺距为第一丝杆的两倍,使种植箱之间的距离始终
一种有机蔬菜用种植装置.pdf
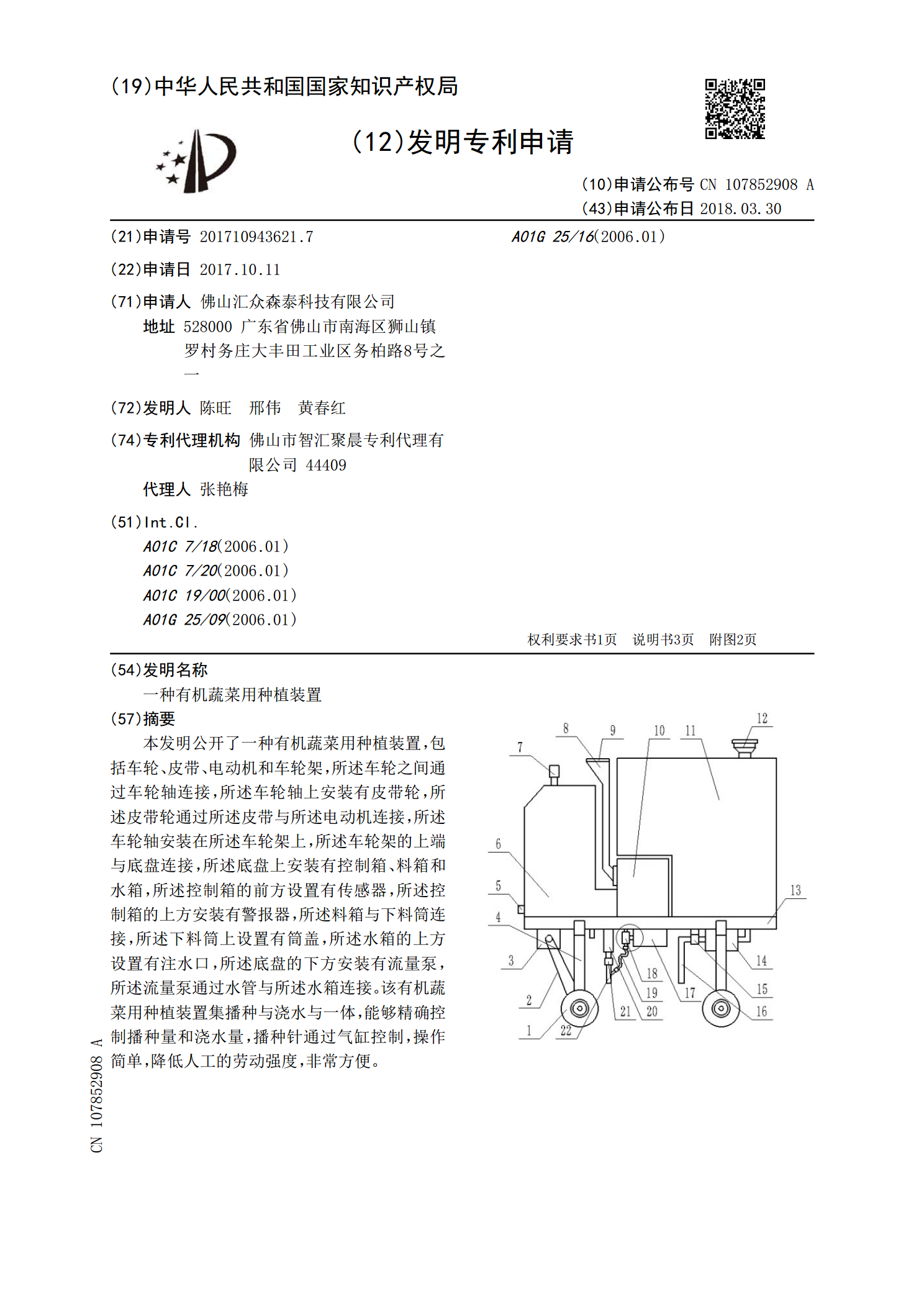
本发明公开了一种有机蔬菜用种植装置,包括车轮、皮带、电动机和车轮架,所述车轮之间通过车轮轴连接,所述车轮轴上安装有皮带轮,所述皮带轮通过所述皮带与所述电动机连接,所述车轮轴安装在所述车轮架上,所述车轮架的上端与底盘连接,所述底盘上安装有控制箱、料箱和水箱,所述控制箱的前方设置有传感器,所述控制箱的上方安装有警报器,所述料箱与下料筒连接,所述下料筒上设置有筒盖,所述水箱的上方设置有注水口,所述底盘的下方安装有流量泵,所述流量泵通过水管与所述水箱连接。该有机蔬菜用种植装置集播种与浇水与一体,能够精确控制播种量