
一种管片拆除机及拆除方法.pdf

Jo****34

1/10

2/10

3/10
4/10
5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种管片拆除机及拆除方法.pdf
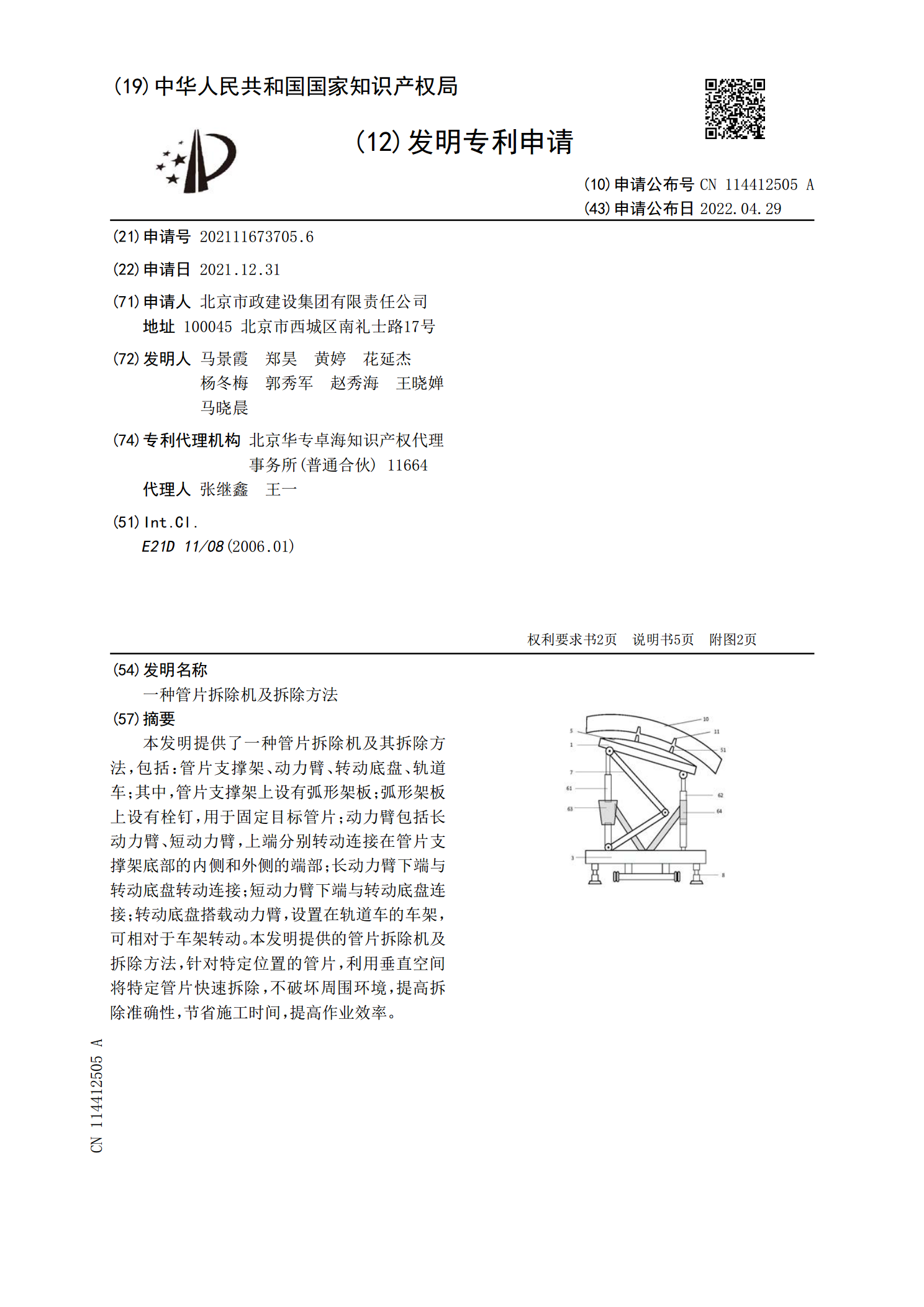
本发明提供了一种管片拆除机及其拆除方法,包括:管片支撑架、动力臂、转动底盘、轨道车;其中,管片支撑架上设有弧形架板;弧形架板上设有栓钉,用于固定目标管片;动力臂包括长动力臂、短动力臂,上端分别转动连接在管片支撑架底部的内侧和外侧的端部;长动力臂下端与转动底盘转动连接;短动力臂下端与转动底盘连接;转动底盘搭载动力臂,设置在轨道车的车架,可相对于车架转动。本发明提供的管片拆除机及拆除方法,针对特定位置的管片,利用垂直空间将特定管片快速拆除,不破坏周围环境,提高拆除准确性,节省施工时间,提高作业效率。

便于拆除负环管片的卸力装置及其拆除方法.pdf
本发明涉及一种便于拆除负环管片的卸力装置及其拆除方法,负环管片设于横通道内,负环管片的供支撑盾构机的端面为前端面,负环管片的与前端面相对的端面为后端面,后端面和横通道内壁的对应弧面之间存在间隙,其中装置包括:设于负环管片的后端面和对应弧面之间的支撑结构,一端贴设于负环管片且和负环管片之间夹设有缓冲层,另一端支撑固定于对应弧面;穿设拉结支撑结构和负环管片的拉结杆,拉结杆的一端从负环管片的内侧穿出并通过第一螺母和负环管片固接,拉结杆的另一端从支撑结构的侧部穿出并通过第二螺母和支撑结构固接。支撑结构起到连接负环

一种升船机螺母柱拆除工装及其拆除方法.pdf
本发明公开了一种升船机螺母柱的拆除工装,其特征在于它包括配合使用的托架工装(1)与顶撑工装(2),所述托架工装(1)包括承托台(101)、设置在承托台(101)下方的三角支腿(104)、以及设置在承托台(101)上并与三角支腿(104)的顶部相连接的支臂(102),在所述三角支腿(104)的顶部与底部均设有塔接板(103),位于三角支腿(104)顶部的塔接板(103)还与支臂(102)相连接。本发明的升船机螺母柱的拆除装置结构简单,主要采用工字钢和槽钢制作,材料成本低廉;采用焊接的方式分别将托架工装和顶撑
一种架桥机拆除方法.pdf
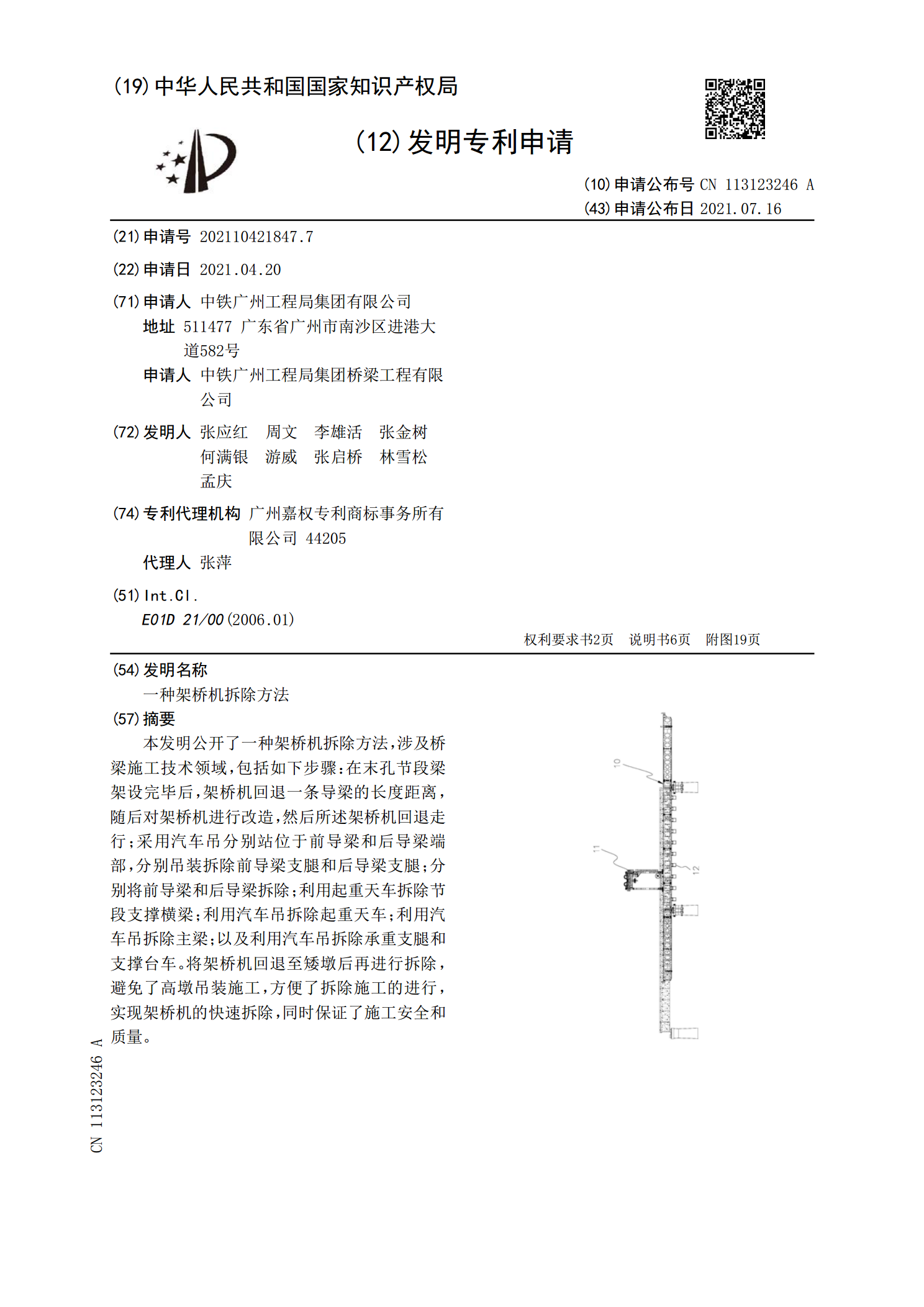
本发明公开了一种架桥机拆除方法,涉及桥梁施工技术领域,包括如下步骤:在末孔节段梁架设完毕后,架桥机回退一条导梁的长度距离,随后对架桥机进行改造,然后所述架桥机回退走行;采用汽车吊分别站位于前导梁和后导梁端部,分别吊装拆除前导梁支腿和后导梁支腿;分别将前导梁和后导梁拆除;利用起重天车拆除节段支撑横梁;利用汽车吊拆除起重天车;利用汽车吊拆除主梁;以及利用汽车吊拆除承重支腿和支撑台车。将架桥机回退至矮墩后再进行拆除,避免了高墩吊装施工,方便了拆除施工的进行,实现架桥机的快速拆除,同时保证了施工安全和质量。

一种用于侵入隧道限界的地铁区间管片拆除方法.pdf
一种用于侵入隧道限界的地铁区间管片拆除方法,其特征在于,包括以下步骤:1)、将管片背面掏空,且使管片与围岩之间形成空腔间隙;2)、拆除一处管片环向螺栓,用水磨钻沿纵缝打第一孔,沿整块管片与第一孔同一环向断面打第二孔;3)、第一孔和第二孔穿入切割线锯,将线锯缠绕在主动轮及辅助轮上;启动绳锯切割机,线锯绕切割面运转磨切管片,完成环向切割工作;切割过程中运转的线锯,采用水冷却,并将研磨碎屑带走;4)、环向切割完毕,调整切割方向,沿第二孔纵向切割管片,完成纵向切割工作;撤除绳锯切割机,即一块管片拆除完成,进行下一