
一种近矢量式水下机器人用推进器.pdf

努力****梓颖

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种近矢量式水下机器人用推进器.pdf
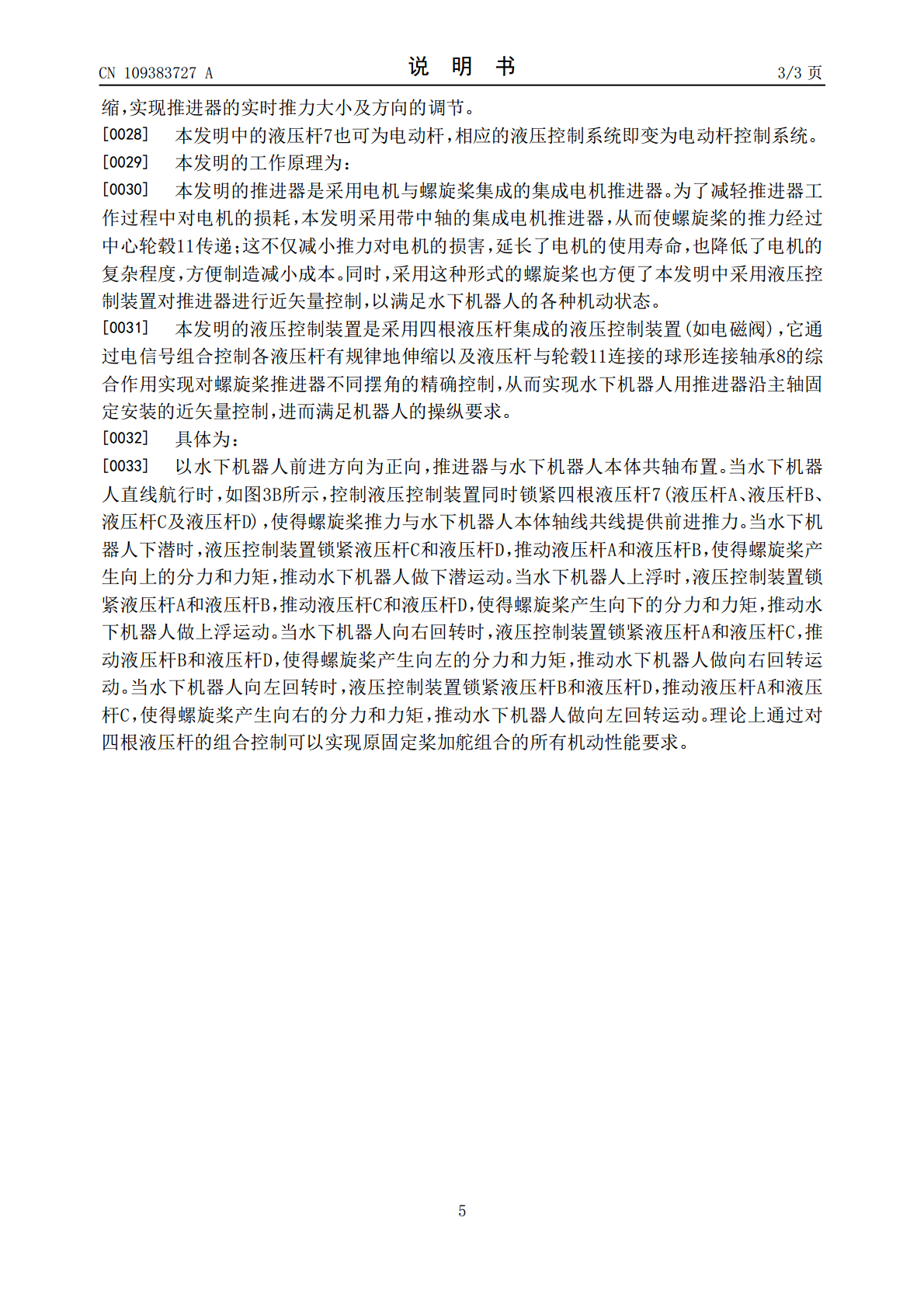
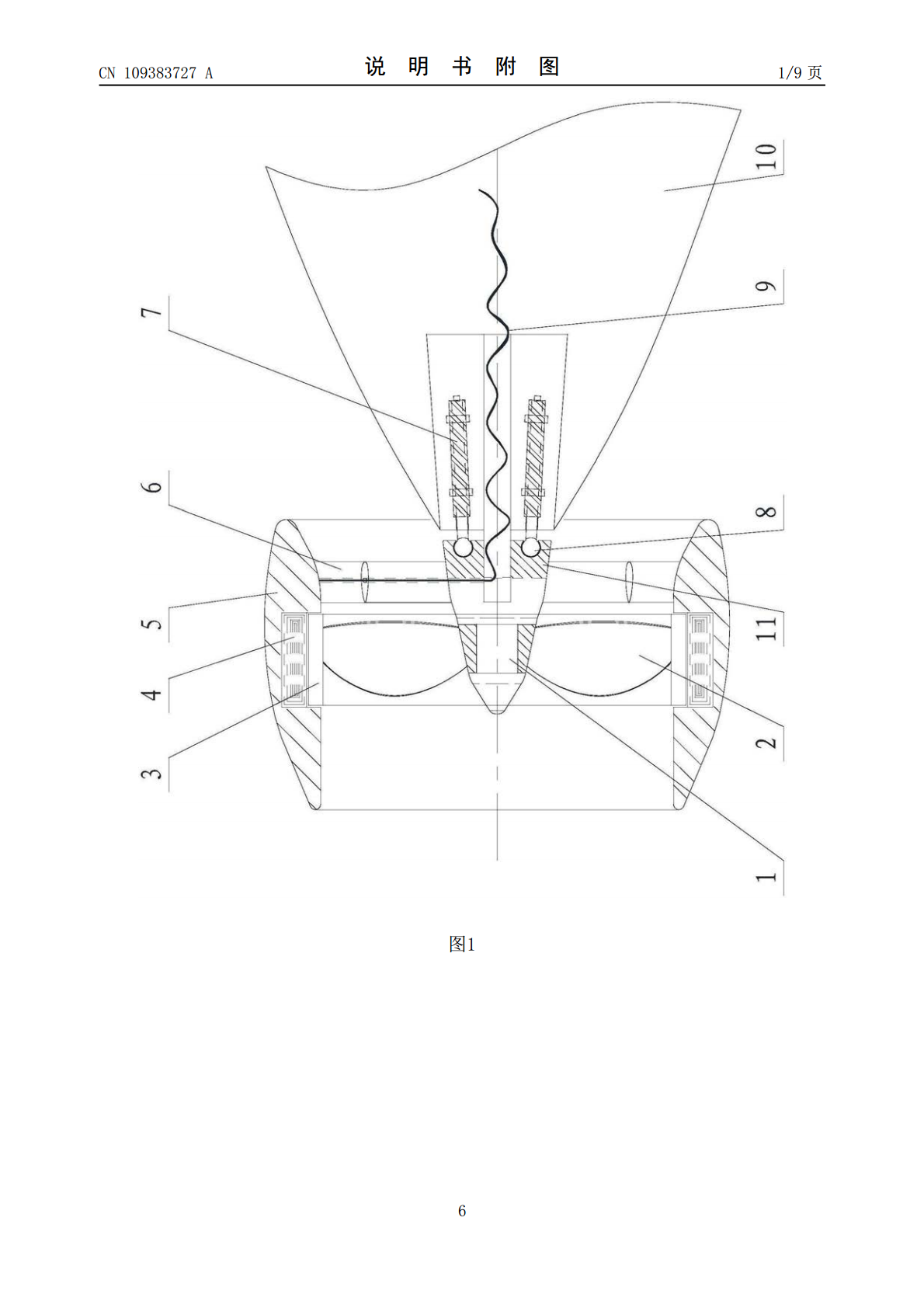
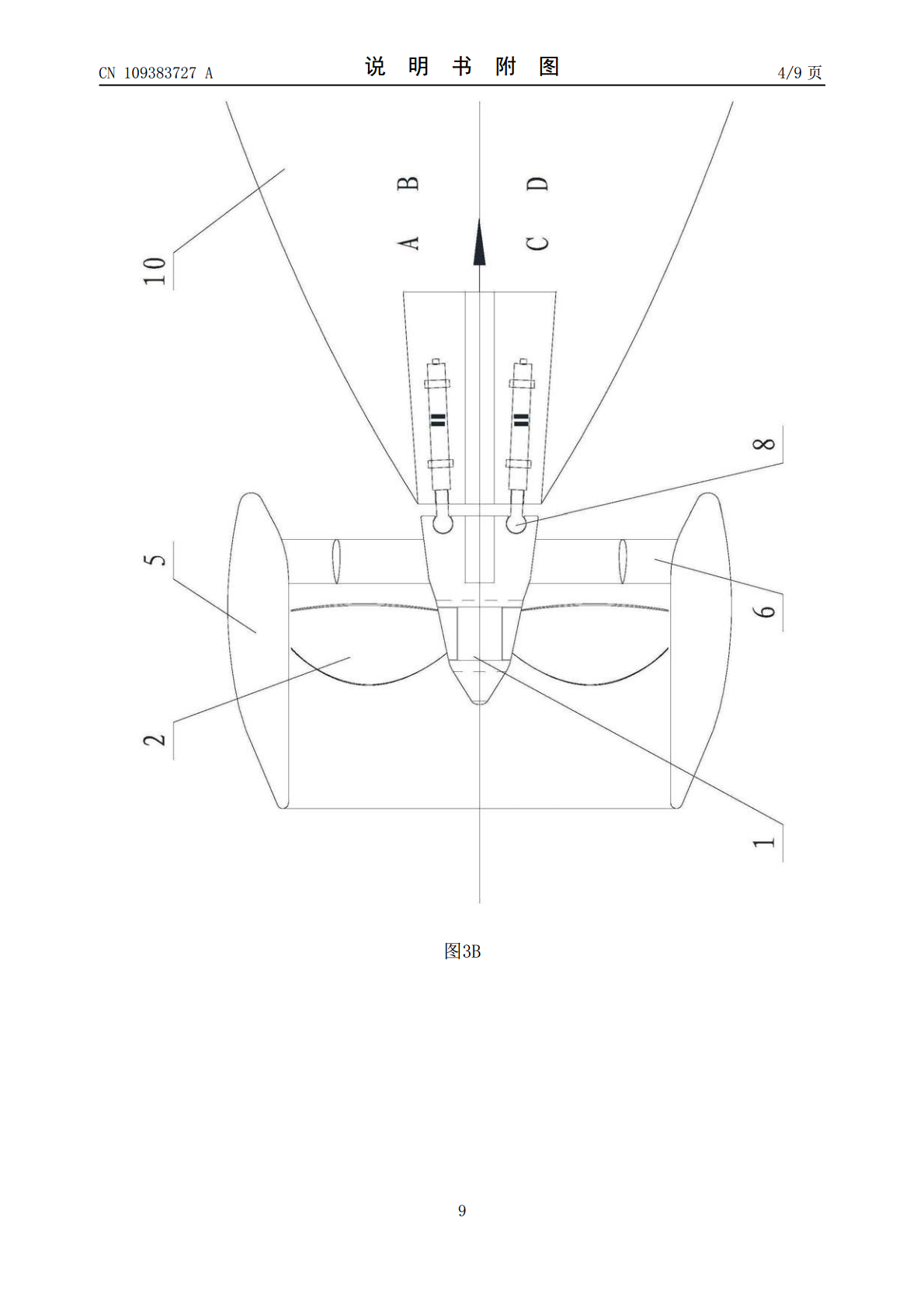
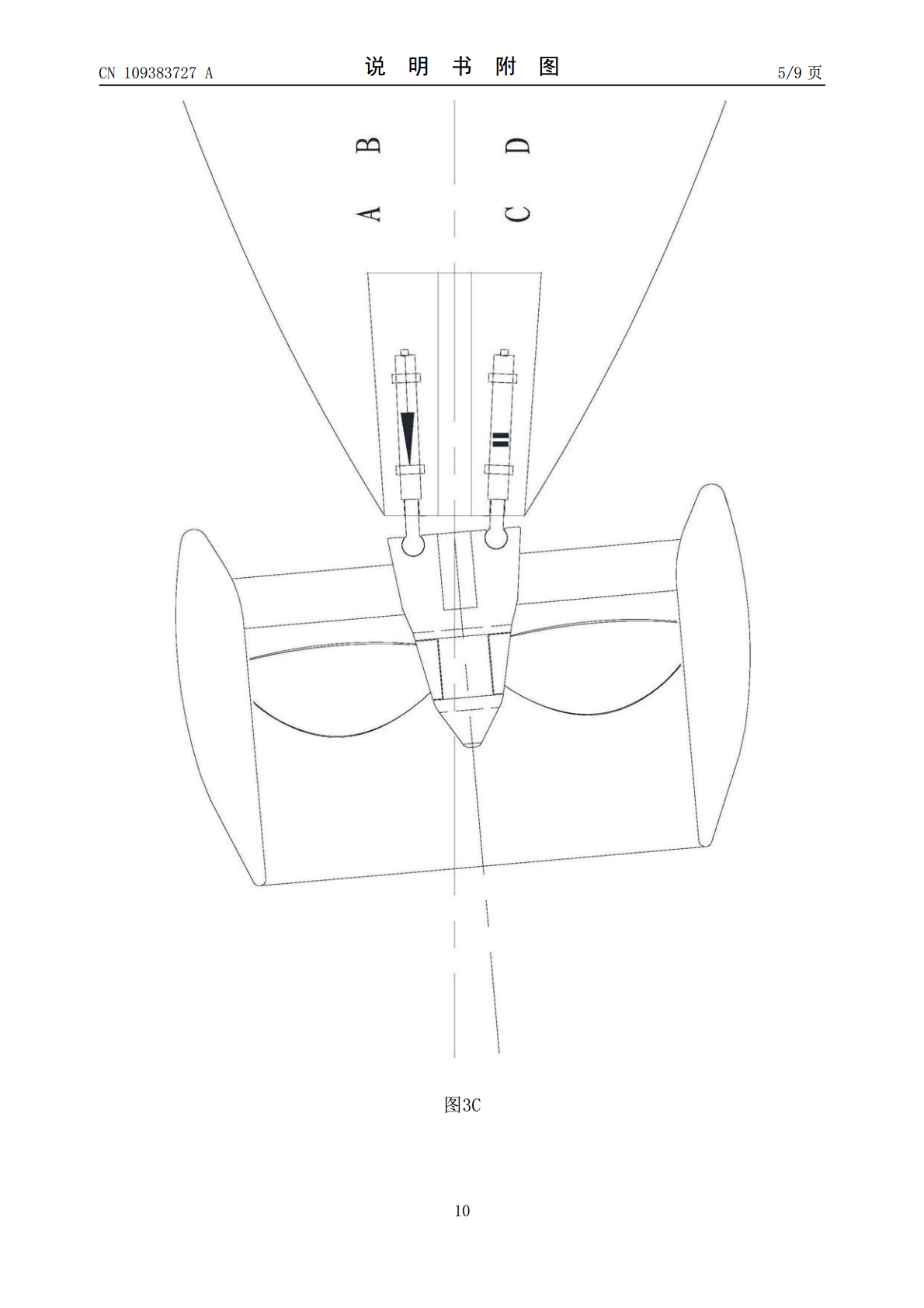
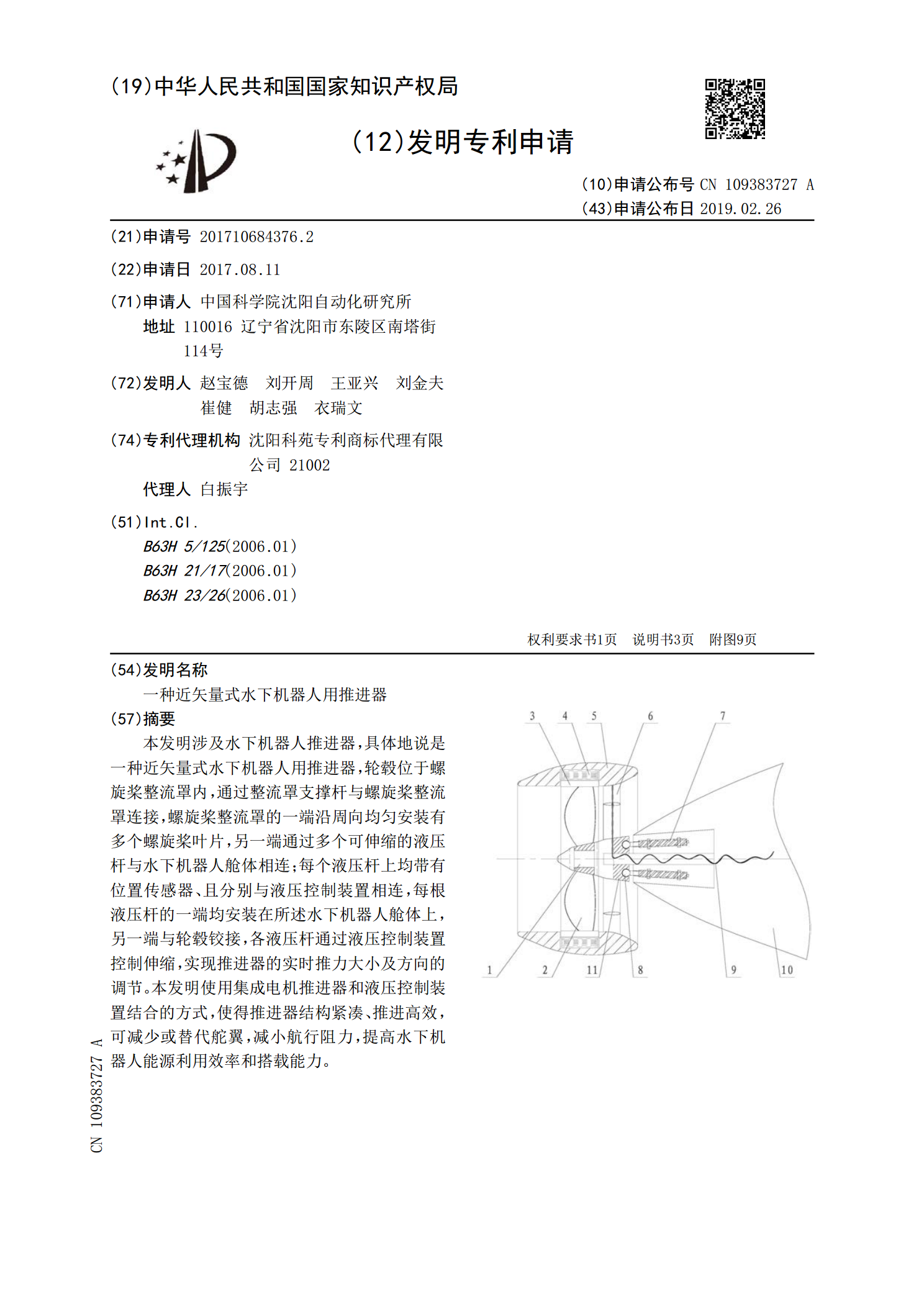
本发明涉及水下机器人推进器,具体地说是一种近矢量式水下机器人用推进器,轮毂位于螺旋桨整流罩内,通过整流罩支撑杆与螺旋桨整流罩连接,螺旋桨整流罩的一端沿周向均匀安装有多个螺旋桨叶片,另一端通过多个可伸缩的液压杆与水下机器人舱体相连;每个液压杆上均带有位置传感器、且分别与液压控制装置相连,每根液压杆的一端均安装在所述水下机器人舱体上,另一端与轮毂铰接,各液压杆通过液压控制装置控制伸缩,实现推进器的实时推力大小及方向的调节。本发明使用集成电机推进器和液压控制装置结合的方式,使得推进器结构紧凑、推进高效,可减少或
一种水下机器人的矢量推进器.pdf
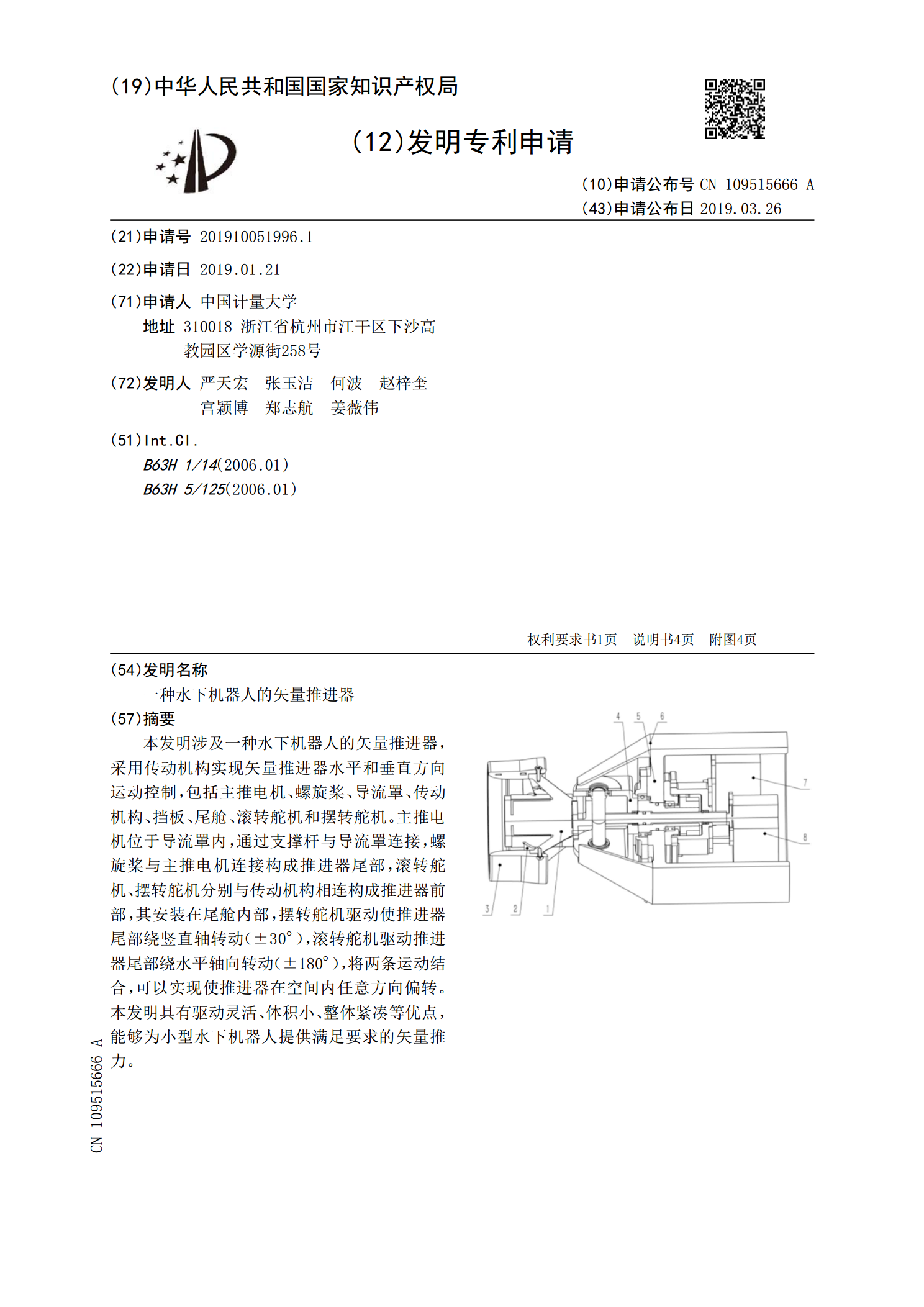
本发明涉及一种水下机器人的矢量推进器,采用传动机构实现矢量推进器水平和垂直方向运动控制,包括主推电机、螺旋桨、导流罩、传动机构、挡板、尾舱、滚转舵机和摆转舵机。主推电机位于导流罩内,通过支撑杆与导流罩连接,螺旋桨与主推电机连接构成推进器尾部,滚转舵机、摆转舵机分别与传动机构相连构成推进器前部,其安装在尾舱内部,摆转舵机驱动使推进器尾部绕竖直轴转动(±30°),滚转舵机驱动推进器尾部绕水平轴向转动(±180°),将两条运动结合,可以实现使推进器在空间内任意方向偏转。本发明具有驱动灵活、体积小、整体紧凑等优点
一种水下机器人的矢量推进器.pdf
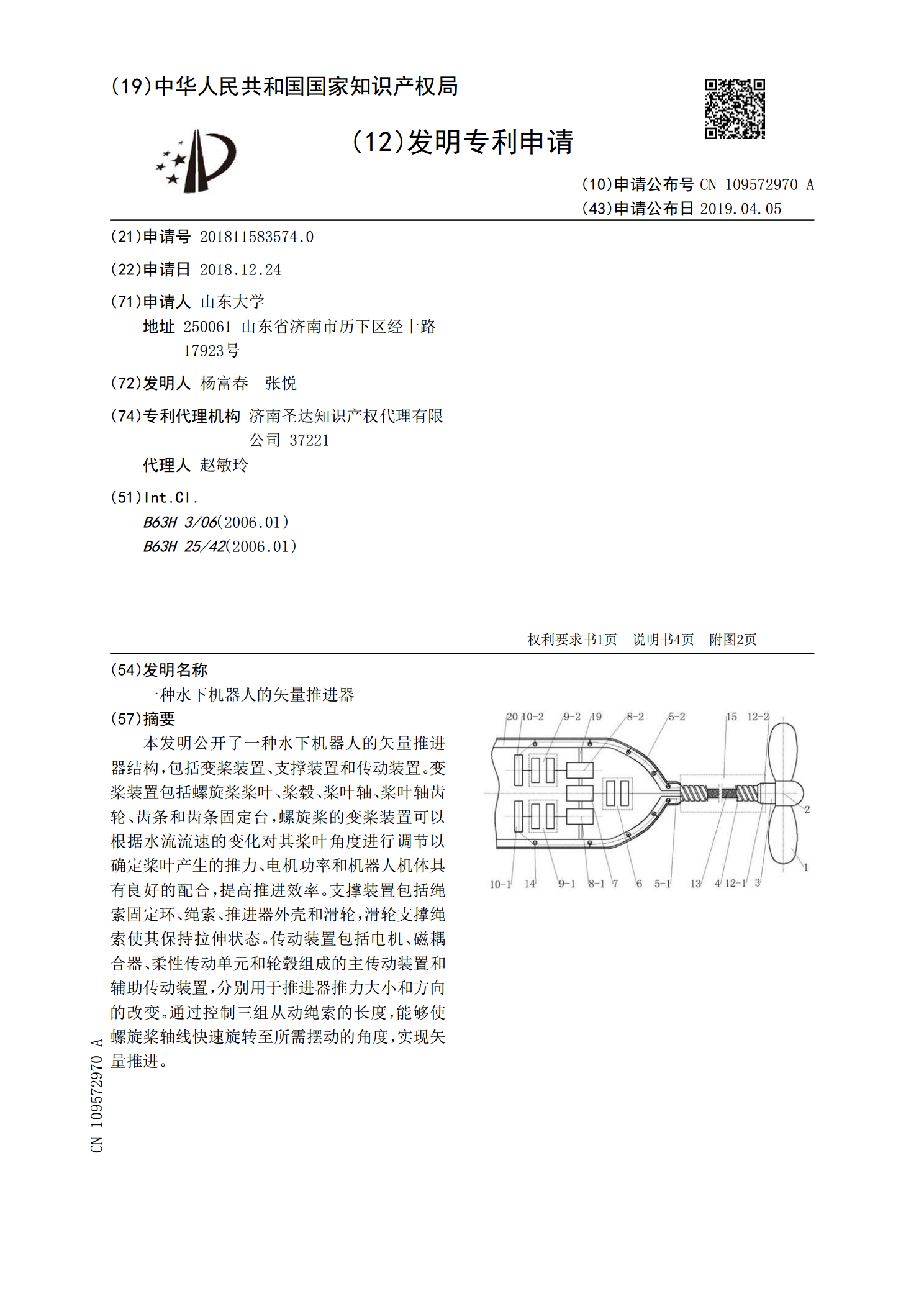
本发明公开了一种水下机器人的矢量推进器结构,包括变桨装置、支撑装置和传动装置。变桨装置包括螺旋桨桨叶、桨毂、桨叶轴、桨叶轴齿轮、齿条和齿条固定台,螺旋桨的变桨装置可以根据水流流速的变化对其桨叶角度进行调节以确定桨叶产生的推力、电机功率和机器人机体具有良好的配合,提高推进效率。支撑装置包括绳索固定环、绳索、推进器外壳和滑轮,滑轮支撑绳索使其保持拉伸状态。传动装置包括电机、磁耦合器、柔性传动单元和轮毂组成的主传动装置和辅助传动装置,分别用于推进器推力大小和方向的改变。通过控制三组从动绳索的长度,能够使螺旋桨轴

一种新型水下矢量推进器.pdf
本发明提供了一种新型水下矢量推进器,属于水下机器人技术领域,包括矢量驱动模块和推进器模块,所述的矢量驱动模块括舱体、球面电磁铁块、球形磁铁和万向节,所述的推进器模块包括推进器外壳、导流罩、支撑件和骨架油封,所述的舱体的内表面分为球面结构段和圆柱结构段,其中球面电磁铁块安装在舱体的球面结构段,所述的外转子电机的前后两端分别设有骨架油封,舱体与推进器外壳之间设有橡胶罩。本发明的有益效果为:具有结构紧凑、操作简单,性能可靠等优点,采用蜂窝矩阵的电磁铁块控制推进器的角度的转动调节,可以代替传统的矢量推进器,同时可
一种两自由度并联式水下矢量推进器.pdf
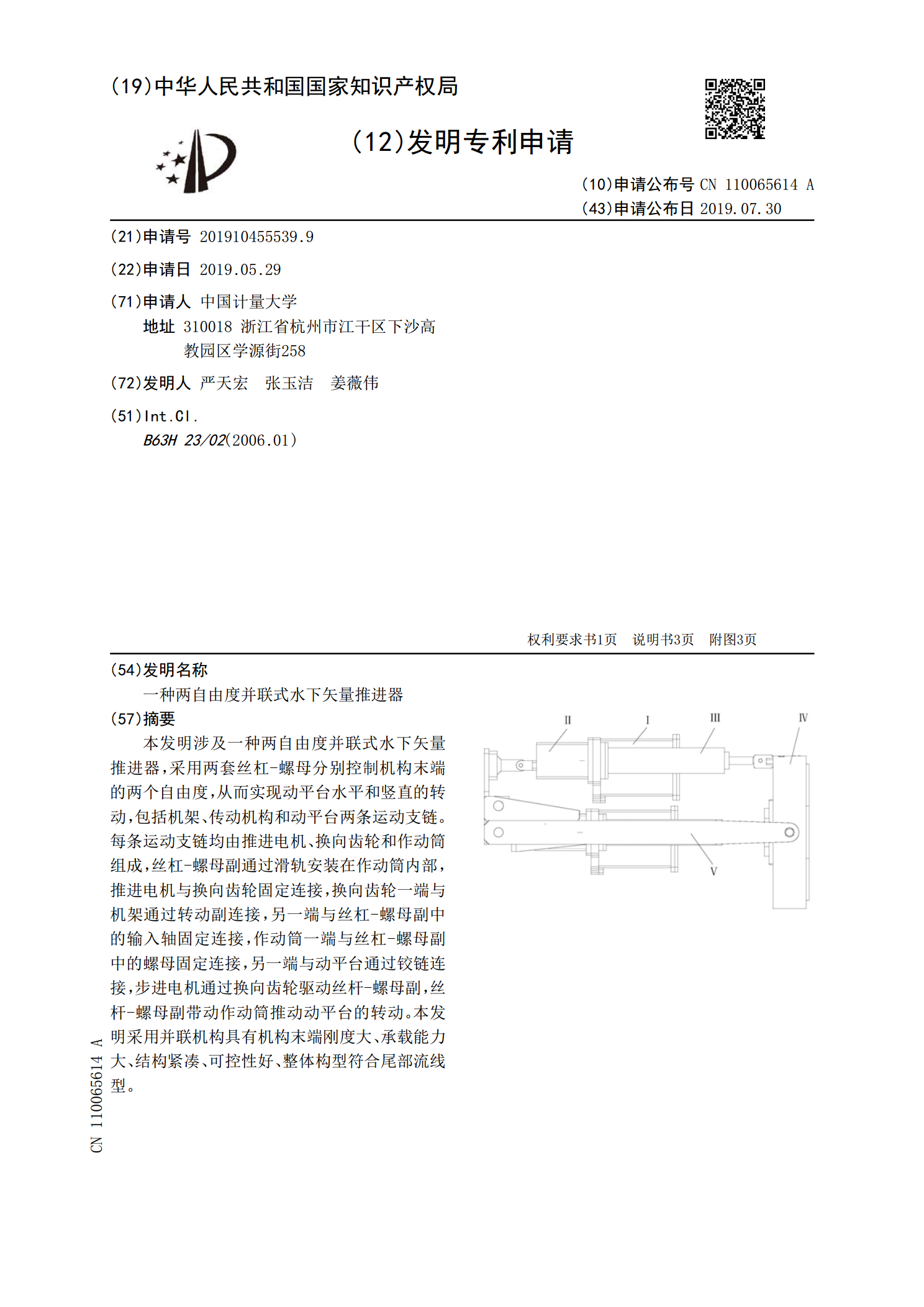
本发明涉及一种两自由度并联式水下矢量推进器,采用两套丝杠‑螺母分别控制机构末端的两个自由度,从而实现动平台水平和竖直的转动,包括机架、传动机构和动平台两条运动支链。每条运动支链均由推进电机、换向齿轮和作动筒组成,丝杠‑螺母副通过滑轨安装在作动筒内部,推进电机与换向齿轮固定连接,换向齿轮一端与机架通过转动副连接,另一端与丝杠‑螺母副中的输入轴固定连接,作动筒一端与丝杠‑螺母副中的螺母固定连接,另一端与动平台通过铰链连接,步进电机通过换向齿轮驱动丝杆‑螺母副,丝杆‑螺母副带动作动筒推动动平台的转动。本发明采用