
一种管道检测机器人.pdf

努力****南绿


1/8
2/8

3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种管道检测机器人.pdf
本发明公开了一种管道检测机器人,包括第一机体,所述第一机体包括机架和安装于所述机架上的调节机构和传动系统,所述传动系统用于将动力传递给所述调节机构,所述调节机构包括至少三组以机架中心轴旋转对称的四杆机构,所述四杆机构为摇杆滑块机构,包括安装于所述机架上的摇杆和滑块,所述摇杆在所述机架上的固定点位于所述摇杆两端的中部,所述摇杆和滑块通过连杆连接,所述摇杆远离所述连杆的一端与所述管道的内壁贴合,所述摇杆随所述管道内径的变化而摇摆。本发明的一种管道检测机器人,能够适应大范围变化的管径,能克服现有技术中存在的驱动
一种管道检测机器人.pdf
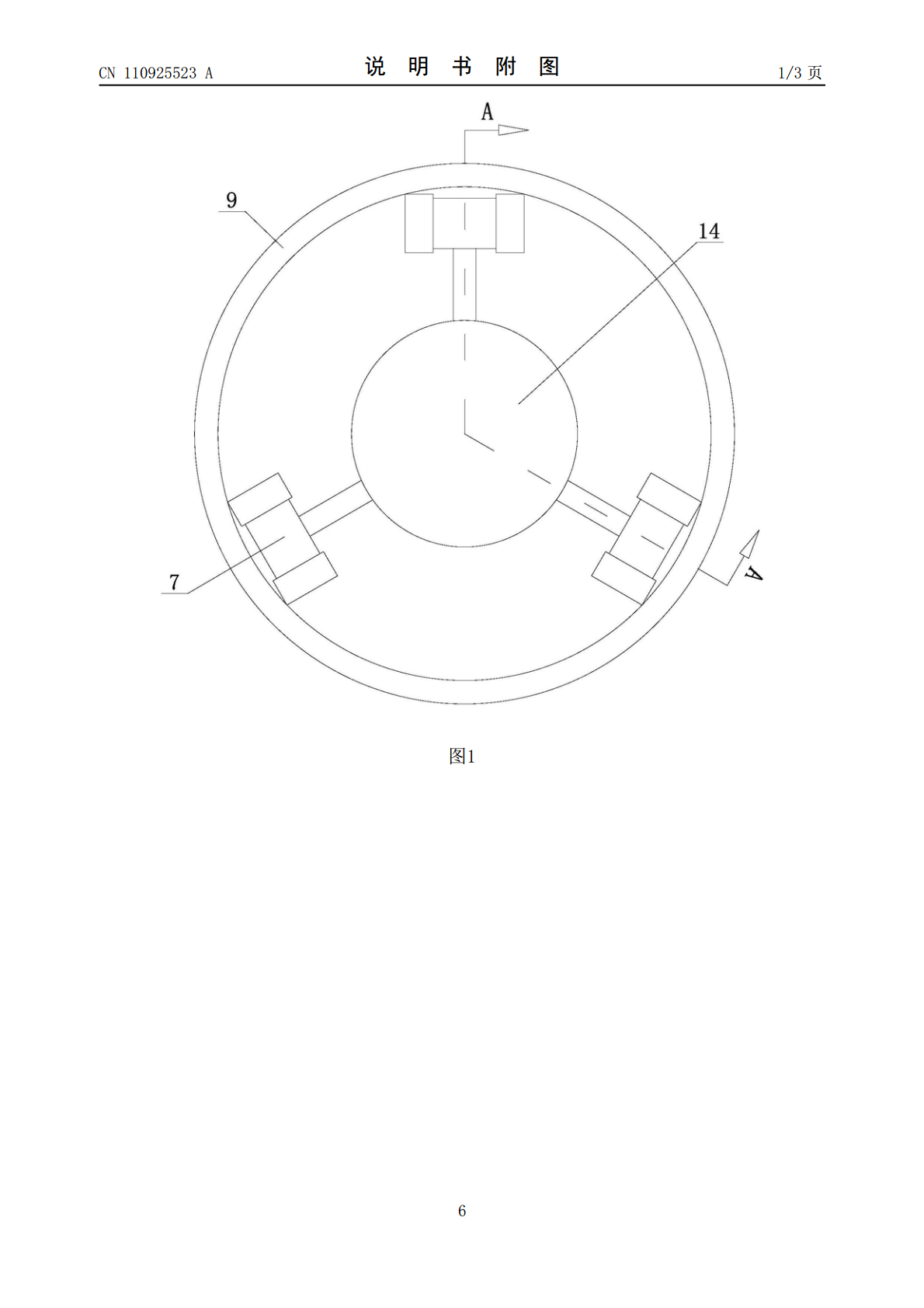
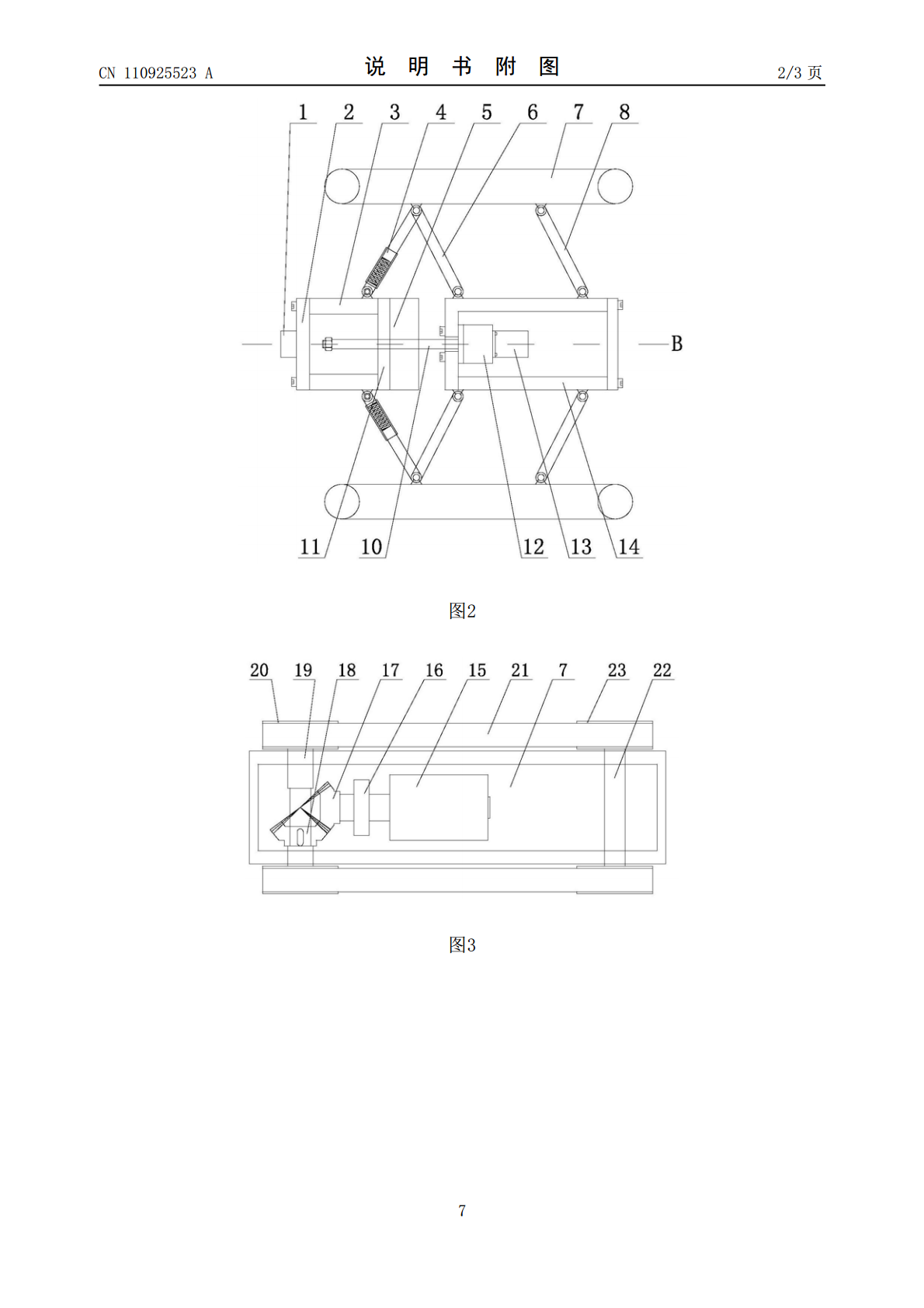
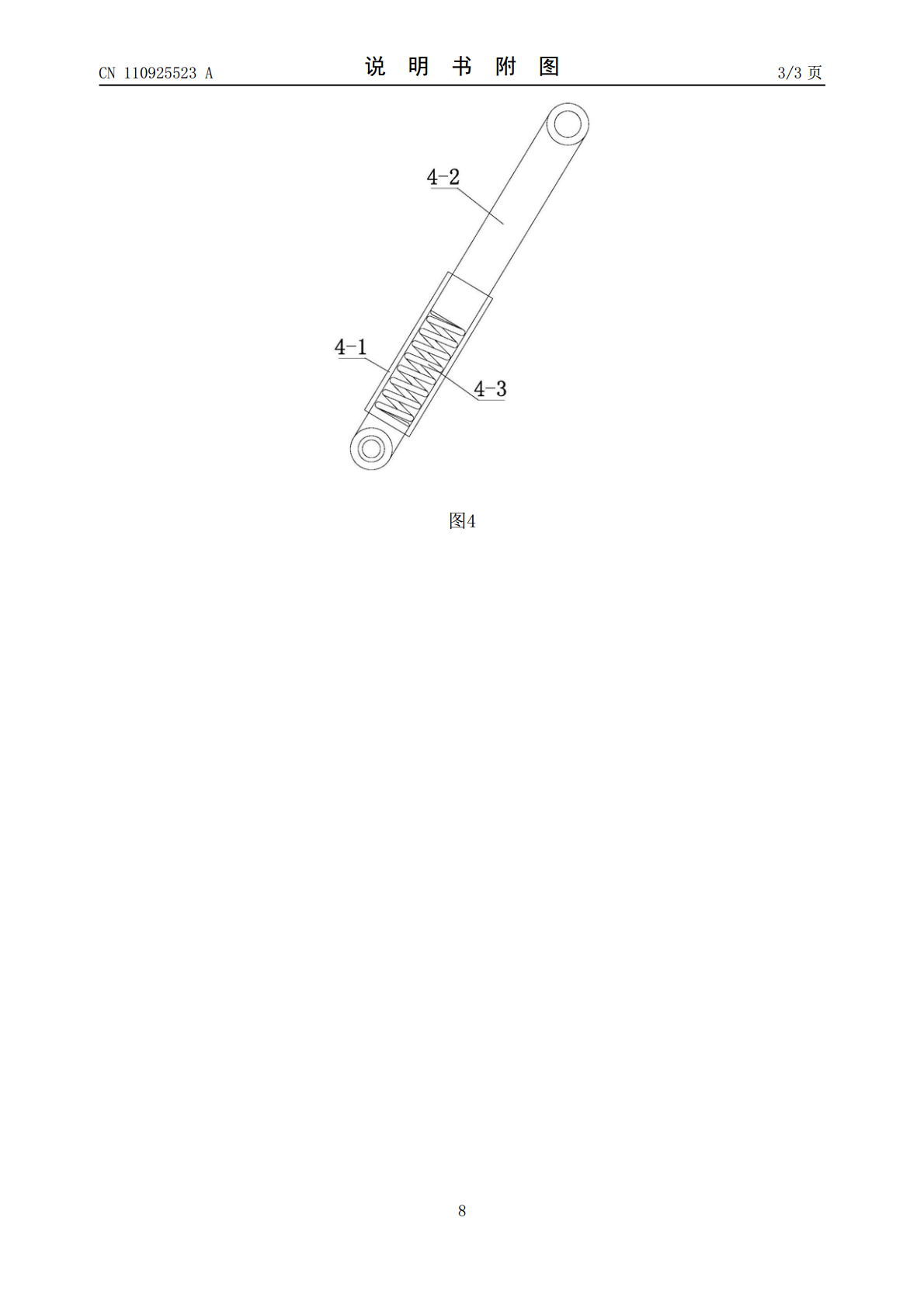
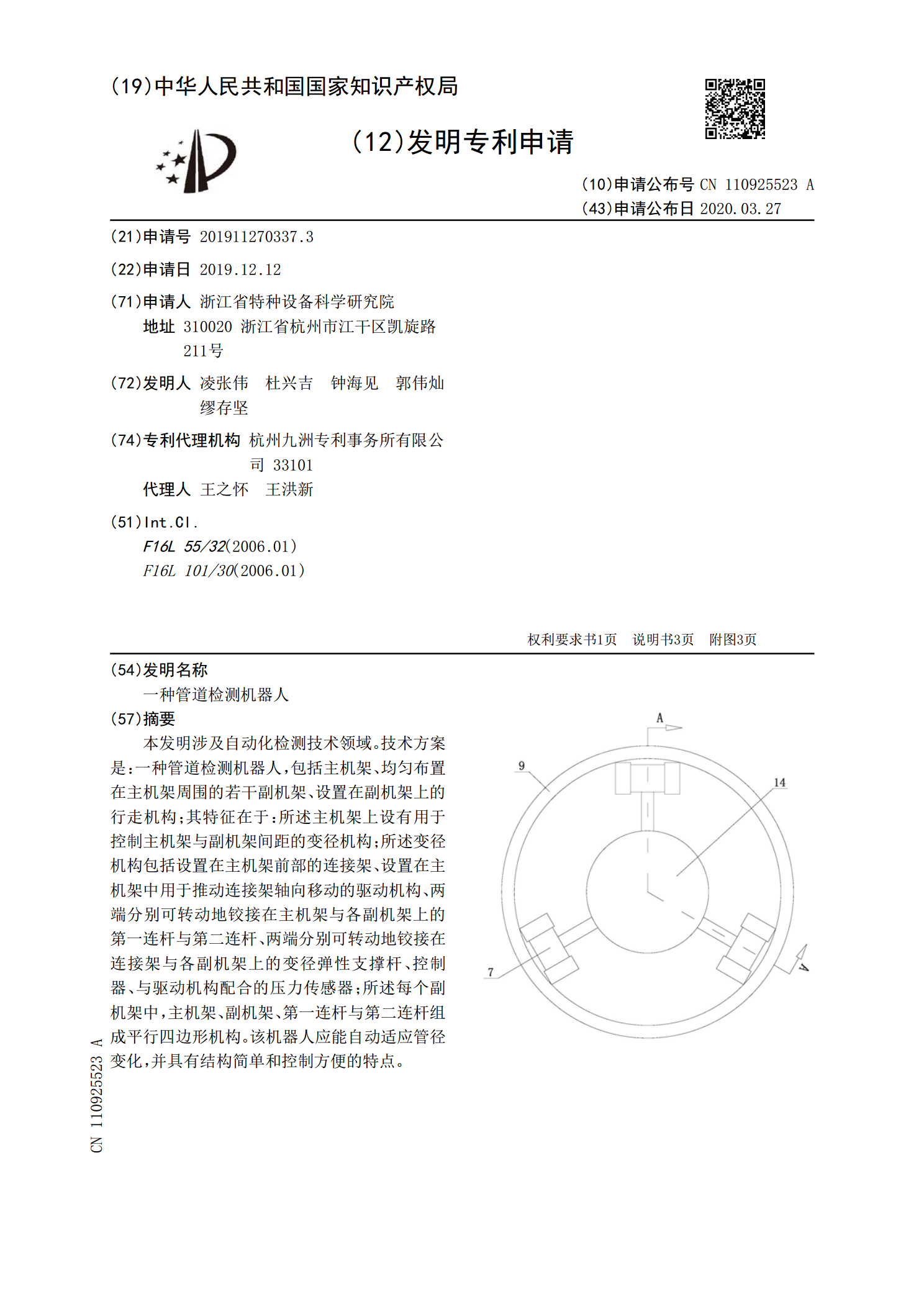
本发明涉及自动化检测技术领域。技术方案是:一种管道检测机器人,包括主机架、均匀布置在主机架周围的若干副机架、设置在副机架上的行走机构;其特征在于:所述主机架上设有用于控制主机架与副机架间距的变径机构;所述变径机构包括设置在主机架前部的连接架、设置在主机架中用于推动连接架轴向移动的驱动机构、两端分别可转动地铰接在主机架与各副机架上的第一连杆与第二连杆、两端分别可转动地铰接在连接架与各副机架上的变径弹性支撑杆、控制器、与驱动机构配合的压力传感器;所述每个副机架中,主机架、副机架、第一连杆与第二连杆组成平行四边
一种管道检测机器人.pdf
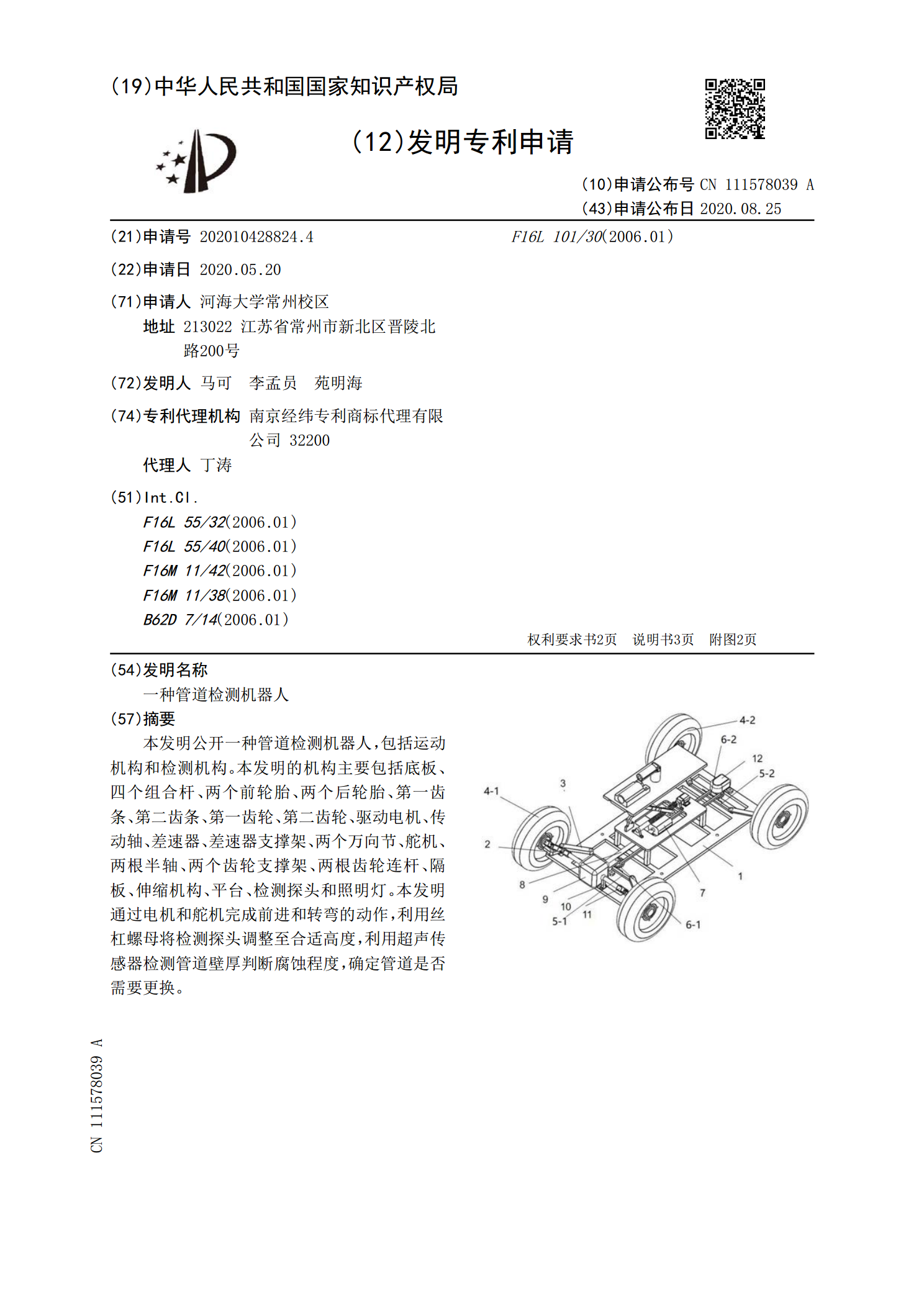
本发明公开一种管道检测机器人,包括运动机构和检测机构。本发明的机构主要包括底板、四个组合杆、两个前轮胎、两个后轮胎、第一齿条、第二齿条、第一齿轮、第二齿轮、驱动电机、传动轴、差速器、差速器支撑架、两个万向节、舵机、两根半轴、两个齿轮支撑架、两根齿轮连杆、隔板、伸缩机构、平台、检测探头和照明灯。本发明通过电机和舵机完成前进和转弯的动作,利用丝杠螺母将检测探头调整至合适高度,利用超声传感器检测管道壁厚判断腐蚀程度,确定管道是否需要更换。
一种管道检测机器人.pdf
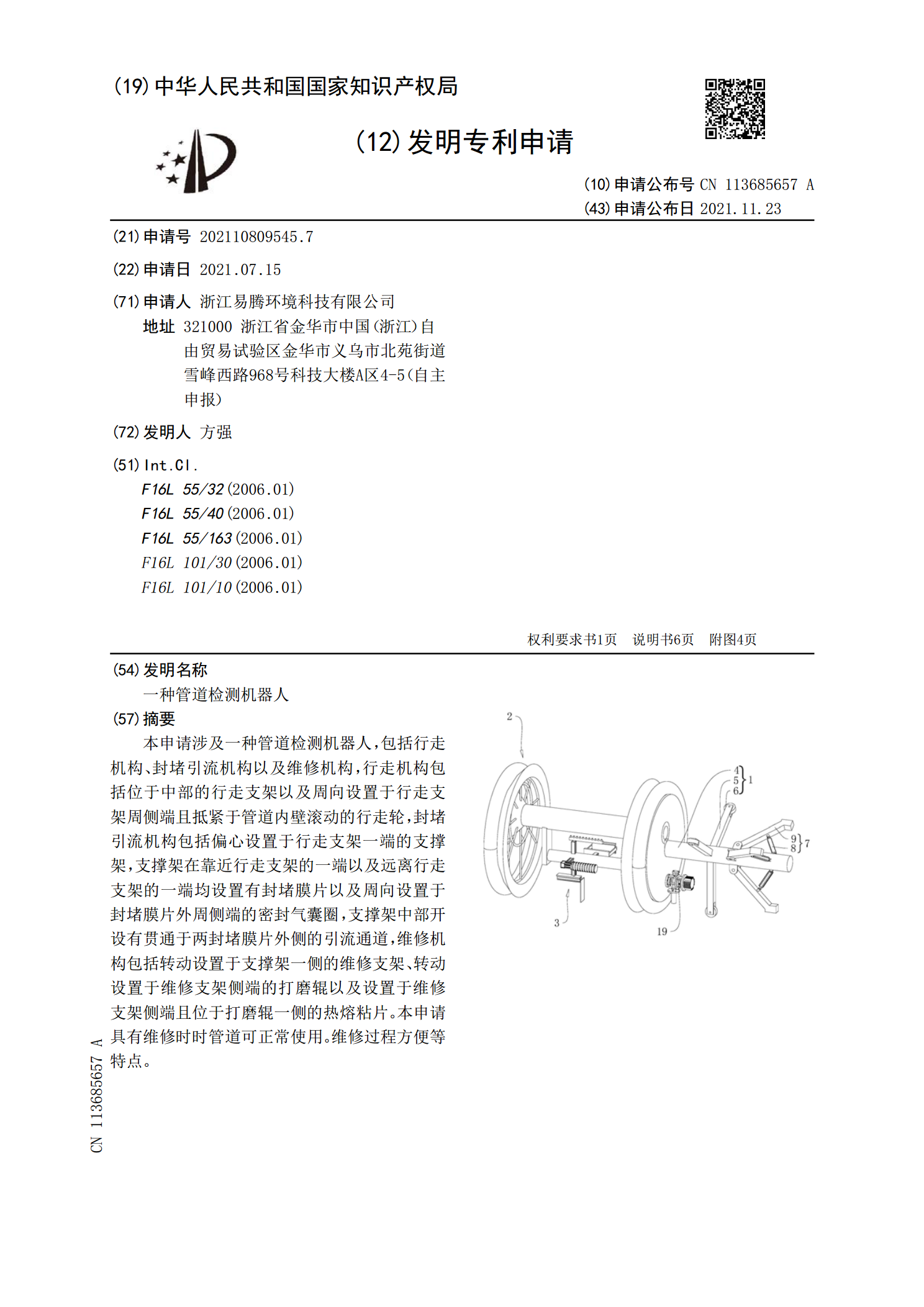
本申请涉及一种管道检测机器人,包括行走机构、封堵引流机构以及维修机构,行走机构包括位于中部的行走支架以及周向设置于行走支架周侧端且抵紧于管道内壁滚动的行走轮,封堵引流机构包括偏心设置于行走支架一端的支撑架,支撑架在靠近行走支架的一端以及远离行走支架的一端均设置有封堵膜片以及周向设置于封堵膜片外周侧端的密封气囊圈,支撑架中部开设有贯通于两封堵膜片外侧的引流通道,维修机构包括转动设置于支撑架一侧的维修支架、转动设置于维修支架侧端的打磨辊以及设置于维修支架侧端且位于打磨辊一侧的热熔粘片。本申请具有维修时时管道可
一种管道检测机器人.pdf
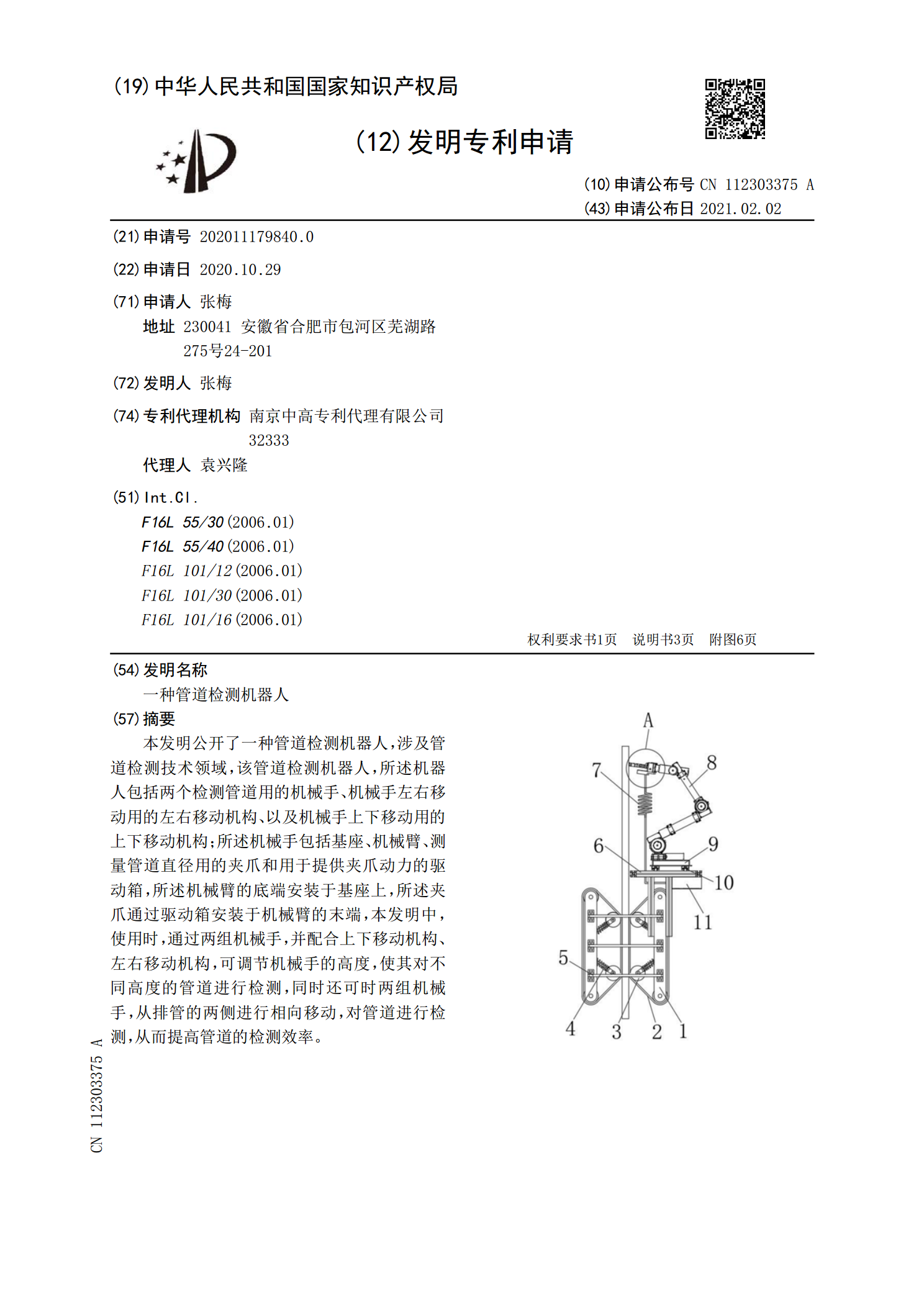
本发明公开了一种管道检测机器人,涉及管道检测技术领域,该管道检测机器人,所述机器人包括两个检测管道用的机械手、机械手左右移动用的左右移动机构、以及机械手上下移动用的上下移动机构;所述机械手包括基座、机械臂、测量管道直径用的夹爪和用于提供夹爪动力的驱动箱,所述机械臂的底端安装于基座上,所述夹爪通过驱动箱安装于机械臂的末端,本发明中,使用时,通过两组机械手,并配合上下移动机构、左右移动机构,可调节机械手的高度,使其对不同高度的管道进行检测,同时还可时两组机械手,从排管的两侧进行相向移动,对管道进行检测,从而提