
紧凑型机器人变刚度关节.pdf

丹烟****魔王

1/8
2/8

3/8

4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

紧凑型机器人变刚度关节.pdf
本发明涉及机器人技术领域,具体地说是一种紧凑型机器人变刚度关节,包括驱动机构、调刚机构和变刚度单元,变刚度单元包括输入轴、连接架和输出盘,输入轴与连接架连接,连接架中间设有丝杠、两侧设有输入支撑杆,丝杠上设有两个螺向相反的丝母,输入支撑杆上设有两个滑轮架,且所述滑轮架与对应丝母固连,输出盘两侧设有输出支撑杆,且输出支撑杆上设有两个滑块,每个滑轮架两端设有滑轮,且位于同一侧的滑轮和滑块通过钢丝绳相连,输出支撑杆的两个滑块之间套设有弹簧,输入轴通过驱动机构驱动转动,变刚度单元一端设有调刚固定板,调刚机构设于所

一种紧凑型变刚度旋转柔性关节.pdf
本发明公开了一种紧凑型变刚度旋转柔性关节,包括关节驱动盘、关节输出盘、关节被动内盘、第一凸轮、第一被动变刚度调整座、第一组压缩弹簧、光轴、第一变刚度调整座、涡轮丝杠结构、第二变刚度调整座、第二组压缩弹簧、第二被动变刚度调整座、第二凸轮、圆柱齿轮、蜗杆、绝对式编码器、电机和圆弧齿条。该柔性关节不仅能够实现柔性驱动输出,降低外部冲击,延长机器人使用寿命,同时能够实现关节刚度随关节柔性变形角度的增大先增大后减小,提高机器人鲁棒性及运行稳定性,并能通过自身驱动主动调整关节刚度,更好的适应不同工作任务,且该柔性关节
仿人肘关节型机器人变刚度关节.pdf
本发明涉及机器人领域,具体地说是一种仿人肘关节型机器人变刚度关节,包括大臂、小臂和变刚度单元,变刚度单元包括输入轴、连接架和输出盘,输入轴与连接架连接,连接架中间设有丝杠、两侧设有输入支撑杆,丝杠上设有两个螺向相反的丝母,输入支撑杆上设有两个滑轮架,且所述滑轮架与对应丝母固连,输出盘两侧设有输出支撑杆,且输出支撑杆上设有两个滑块,每个滑轮架两端设有滑轮,且位于同一侧的滑轮和滑块通过钢丝绳相连,输出支撑杆的两个滑块之间套设有弹簧,输出盘通过输出连接件与小臂连接,大臂内设有位姿驱动机构,小臂内设有调刚机构,输

变刚度并联关节蛇形机器人机构.pdf
本发明涉及一种变刚度并联关节蛇形机器人机构,属于机器人领域。机器人由若干运动单元串联构成,每个运动单元含有两自由度空间并联关节,关节由一条固定U支链、两条SPDU主动支链构成,主动支链含有变刚度直线驱动器;旋转轴与固定U支链平行的主动轮构成运动单元轮廓,通过能抵消反向力矩的隔振装置与固定U支链连接。优点在于:主动支链刚度、阻尼受控可变,使蛇形机器人既可以通过增加关节柔性提高地形适应能力,又可以通过增加关节刚度提高姿态精确性与稳定性,从而增加本发明的适用性;机器人运动过程中产生的振动被隔振装置以及主动支链吸
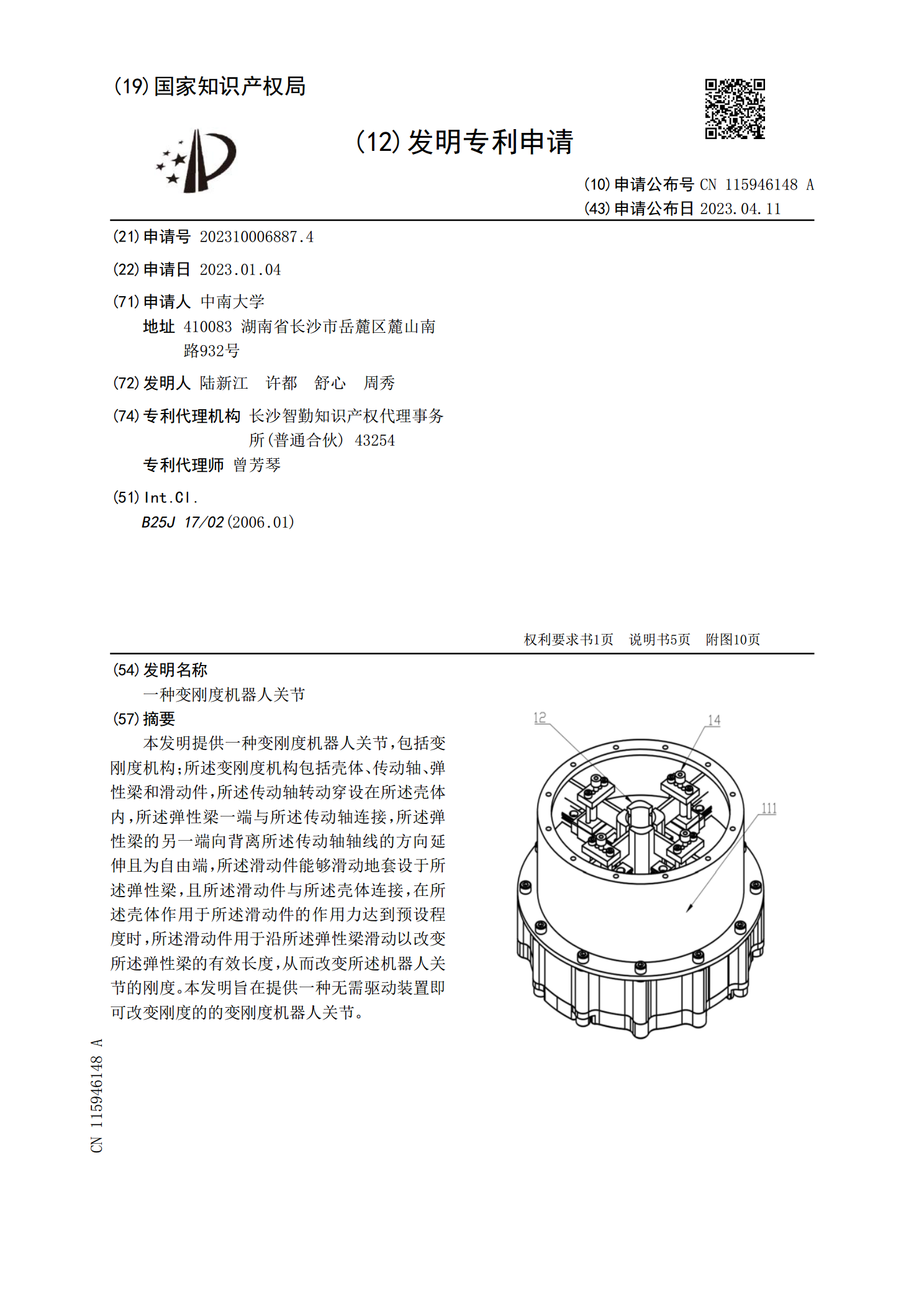
一种变刚度机器人关节.pdf
本发明提供一种变刚度机器人关节,包括变刚度机构;所述变刚度机构包括壳体、传动轴、弹性梁和滑动件,所述传动轴转动穿设在所述壳体内,所述弹性梁一端与所述传动轴连接,所述弹性梁的另一端向背离所述传动轴轴线的方向延伸且为自由端,所述滑动件能够滑动地套设于所述弹性梁,且所述滑动件与所述壳体连接,在所述壳体作用于所述滑动件的作用力达到预设程度时,所述滑动件用于沿所述弹性梁滑动以改变所述弹性梁的有效长度,从而改变所述机器人关节的刚度。本发明旨在提供一种无需驱动装置即可改变刚度的的变刚度机器人关节。