
基于智能视觉的洗衣机内筒孔位检测方法.pdf

明钰****甜甜

1/8
2/8
3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于智能视觉的洗衣机内筒孔位检测方法.pdf
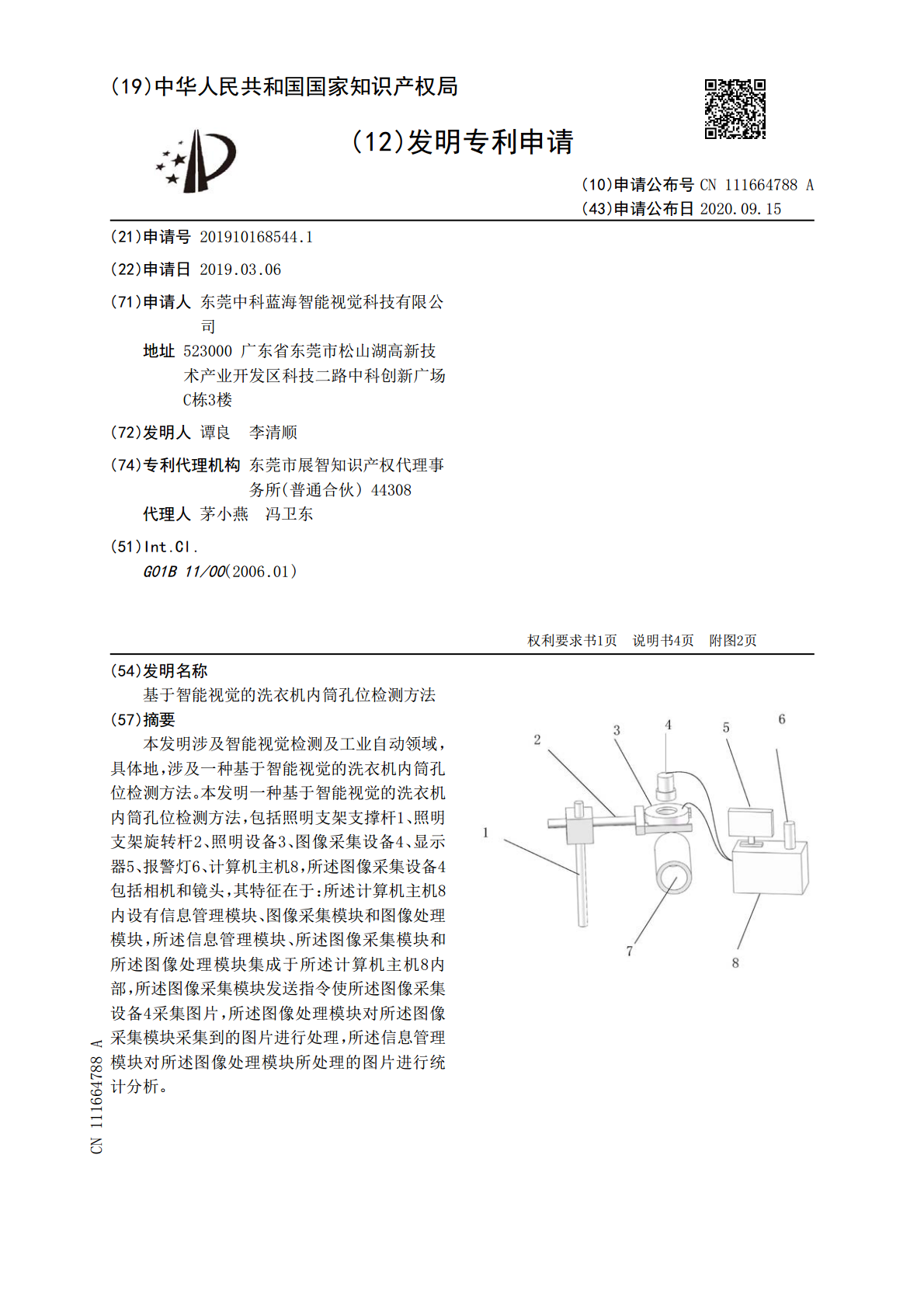
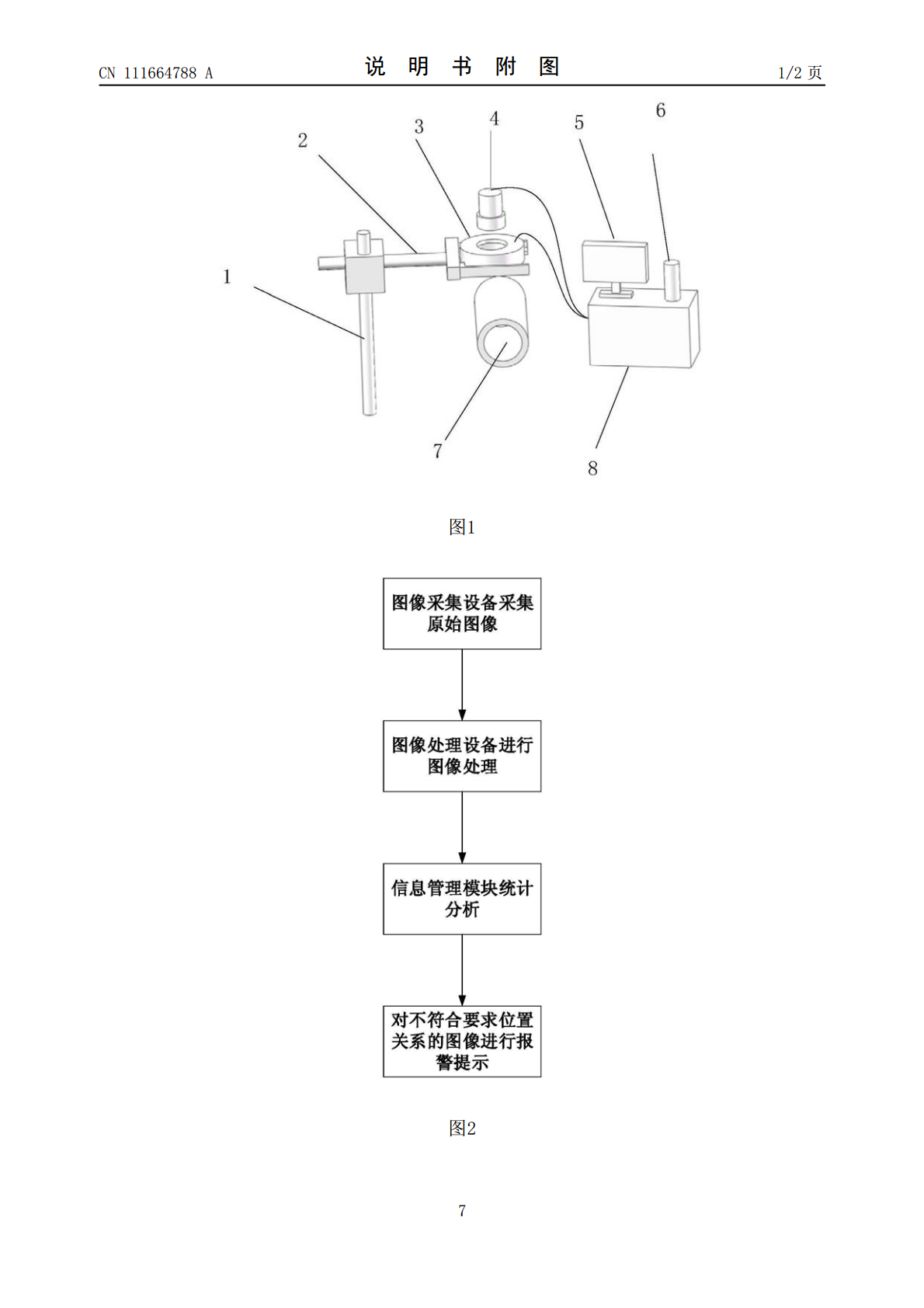
本发明涉及智能视觉检测及工业自动领域,具体地,涉及一种基于智能视觉的洗衣机内筒孔位检测方法。本发明一种基于智能视觉的洗衣机内筒孔位检测方法,包括照明支架支撑杆1、照明支架旋转杆2、照明设备3、图像采集设备4、显示器5、报警灯6、计算机主机8,所述图像采集设备4包括相机和镜头,其特征在于:所述计算机主机8内设有信息管理模块、图像采集模块和图像处理模块,所述信息管理模块、所述图像采集模块和所述图像处理模块集成于所述计算机主机8内部,所述图像采集模块发送指令使所述图像采集设备4采集图片,所述图像处理模块对所述图

洗衣机内筒清洁方法、装置、设备及智能洗衣机.pdf
本发明属于智能家电技术领域,具体涉及一种洗衣机内筒清洁方法、装置、设备及智能洗衣机。本发明旨在解决现有衣物清洗后存在异味的问题。本发明实施例通过获取水分检测信息,其中,水分检测信息用于指示洗衣机内筒的水分存留量;若水分检测信息所指示的水分存留量符合第一预设条件,则对洗衣机内筒的水分进行洁净度检测,生成洁净度检测结果;若洁净度检测结果表征洗衣机内筒不洁净,则启动烘干功能对洗衣机内筒进行烘干。由于在对洗衣机内筒依次进行水分存留量检测和洁净度检测后,可以确定洗衣机内筒是否清洁,据此启动烘干功能进行烘干,可以以较
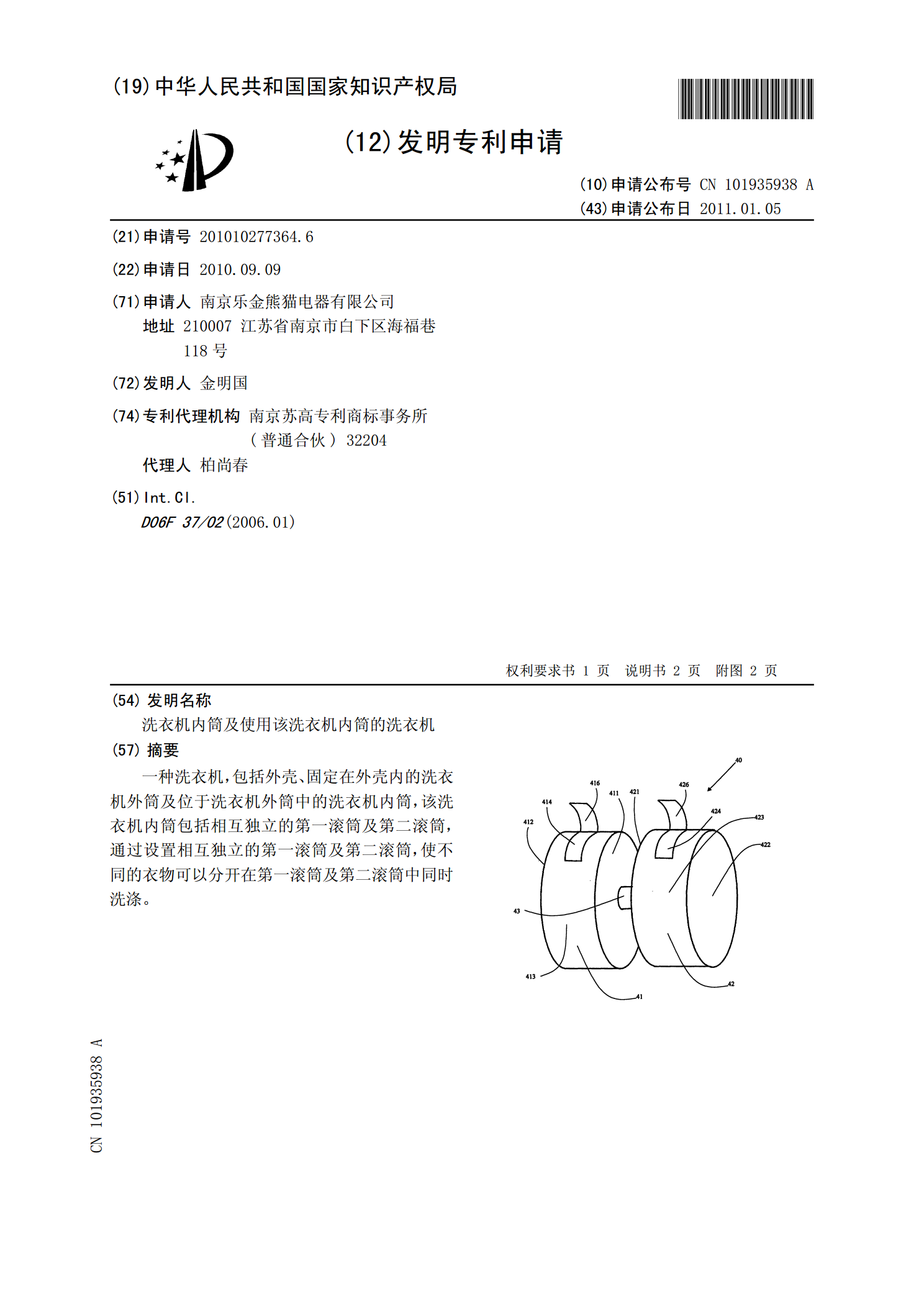
洗衣机内筒及使用该洗衣机内筒的洗衣机.pdf
一种洗衣机,包括外壳、固定在外壳内的洗衣机外筒及位于洗衣机外筒中的洗衣机内筒,该洗衣机内筒包括相互独立的第一滚筒及第二滚筒,通过设置相互独立的第一滚筒及第二滚筒,使不同的衣物可以分开在第一滚筒及第二滚筒中同时洗涤。

洗衣机内筒清洗方法有哪些.docx
洗衣机内筒清洗方法有哪些洗衣机内筒清洗方法有哪些在日常的学习、工作、生活中,大家都经常看到洗衣机的身影吧,以下是小编整理的洗衣机内筒清洗方法有哪些,欢迎大家借鉴与参考,希望对大家有所帮助。洗衣机内筒清洗方法一、专业型:找专人清洗由于操作较专业,所以建议朋友们还是很有必要找专人进行,他们最大的优点在于可以将你的洗衣机拆开,对其360°大清洗,无论是滚筒夹层、排水口或是底板。另外,他们清洗更加彻底,所以不需要常清洗,一般1-2年左右清洗一次即可,花费的话看地区和机子型号,30-200不等。二、居家型:买清洁粉

夏季洗衣机内筒霉菌清理方法.docx
夏季洗衣机内筒霉菌清理方法夏季洗衣机内筒霉菌清理方法导语:时值盛夏,又到了洗衣机使用频繁期。很多家庭主妇们在洗完衣服后,都会把洗衣机的机器盖或者舱门关闭,洗衣机里里外外擦得倒是很干净,然而把盖子盖好这个很普遍的举动,也许会给您带来很多意想不到的后果。一起了解一下吧!有研究表示,新的洗衣机在使用5个月后,内桶里的霉菌较比以前增长迅速,尤其是住在楼房一层住户的洗衣机霉菌较多,天天使用洗衣的住户要比几天用一次洗衣机的住户更容易滋生细菌。洗衣后开盖的洗衣机比不开盖的洗衣机细菌大约减少40%。洗衣机内部的环境是温暖