
基于ORP值的智能移动增氧装置及其增氧方法.pdf

岚风****55

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于ORP值的智能移动增氧装置及其增氧方法.pdf
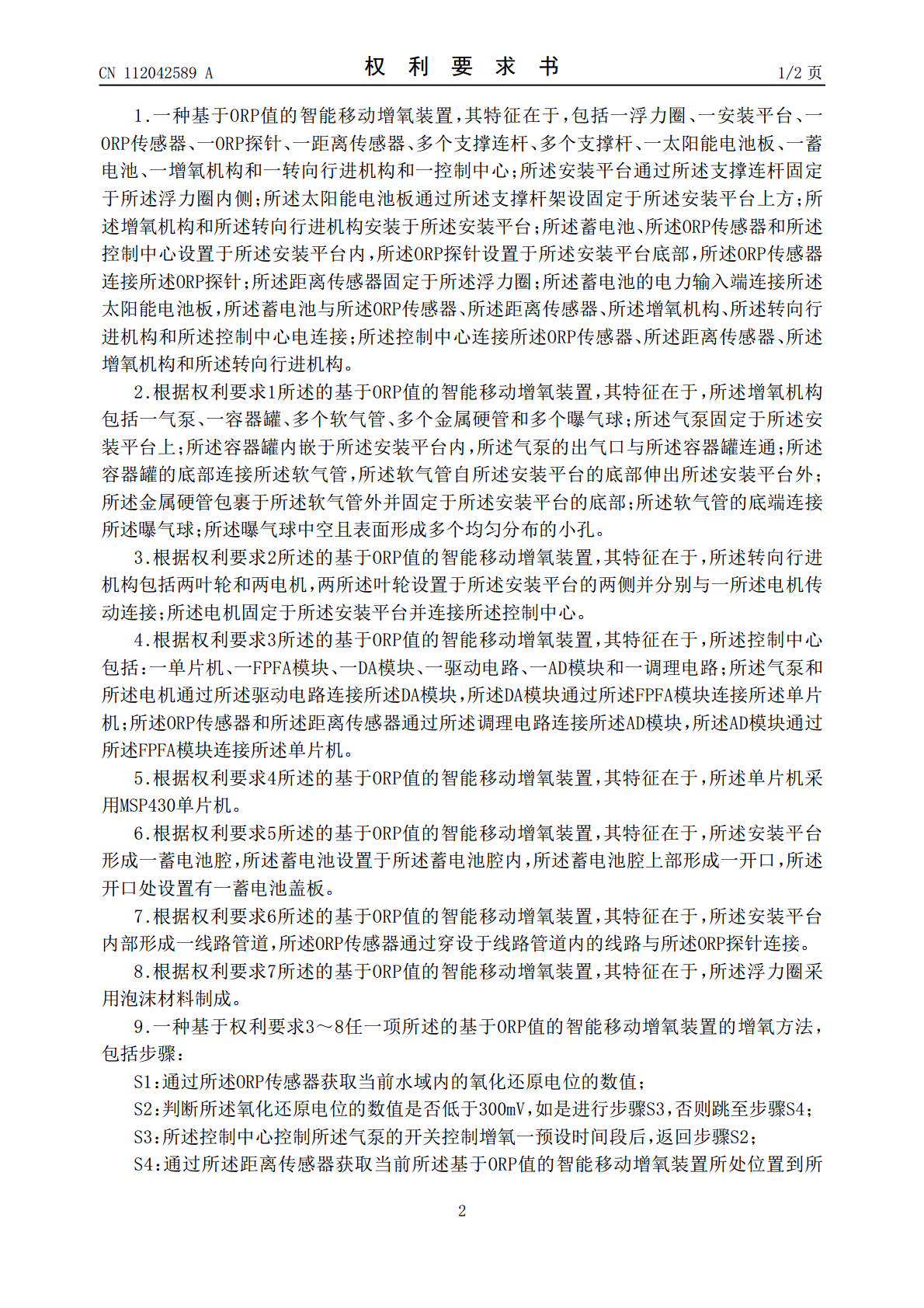
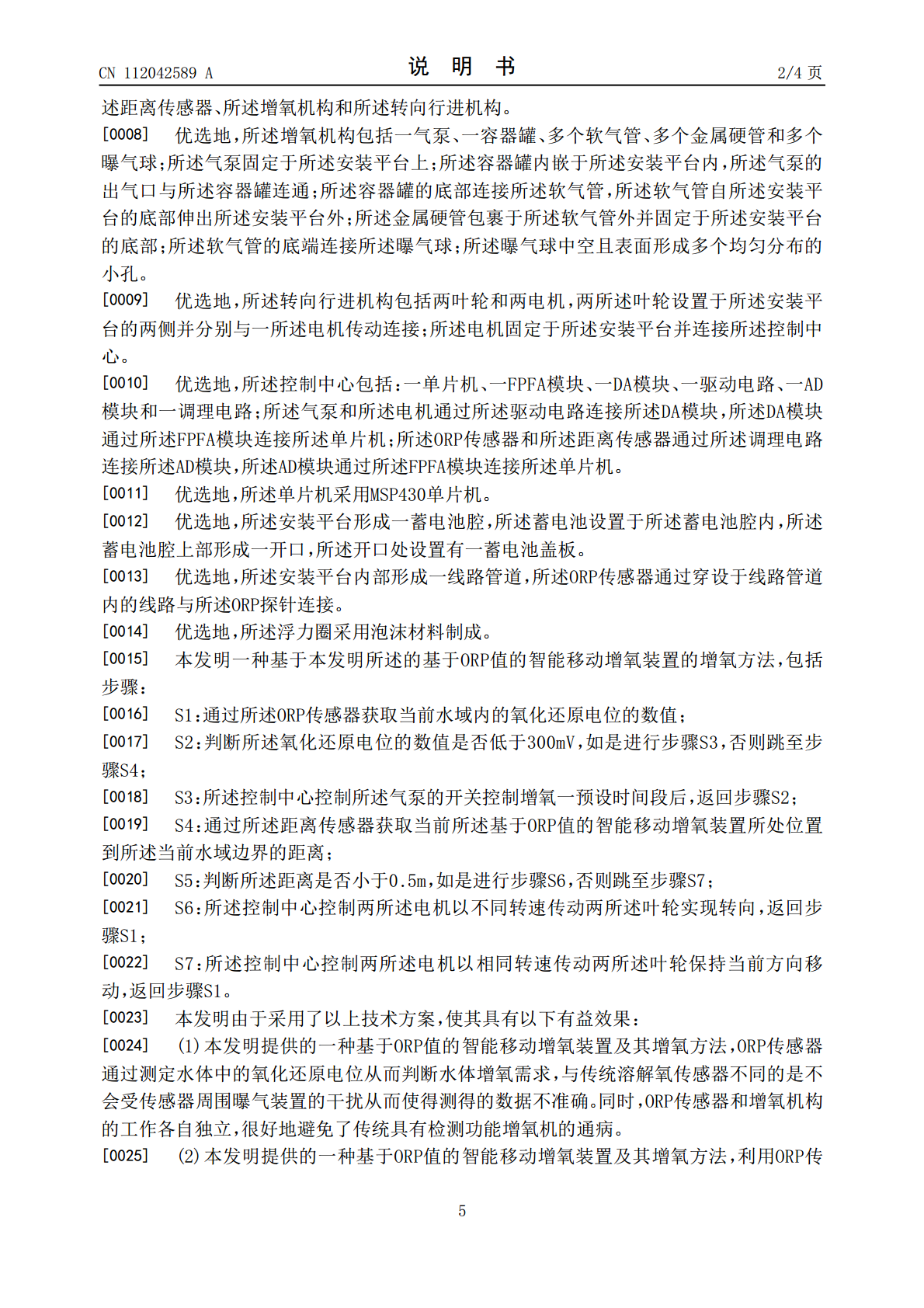
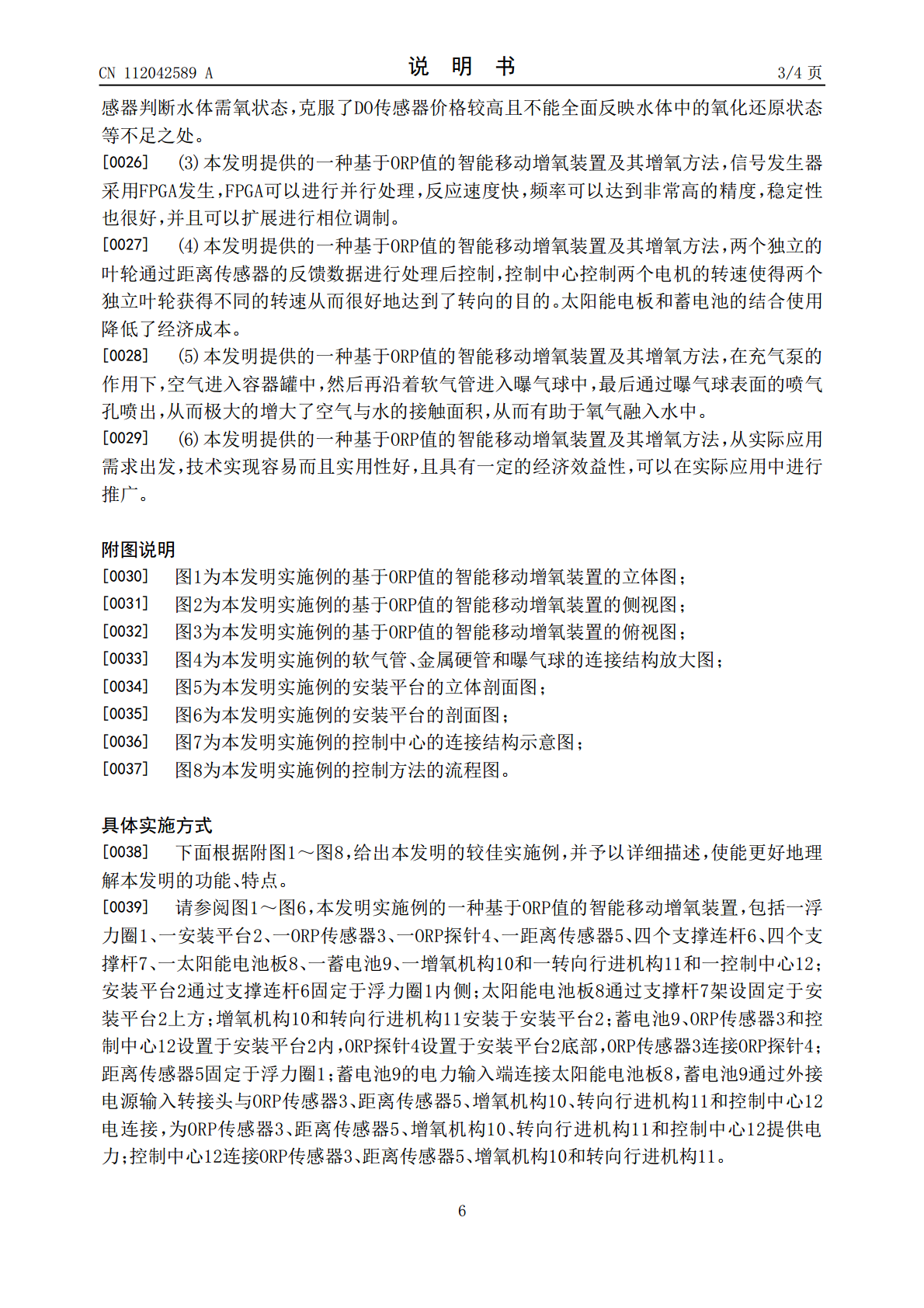
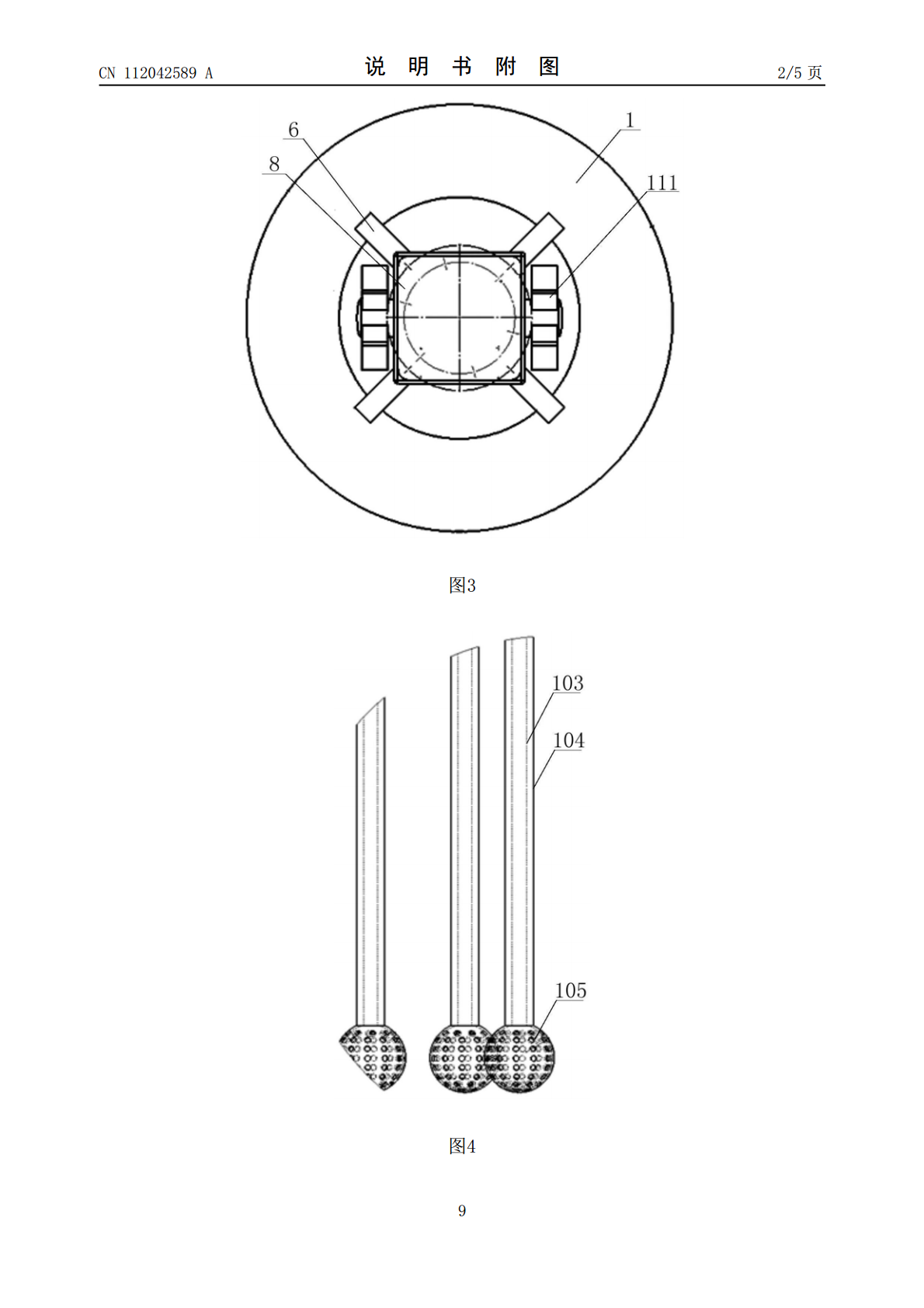
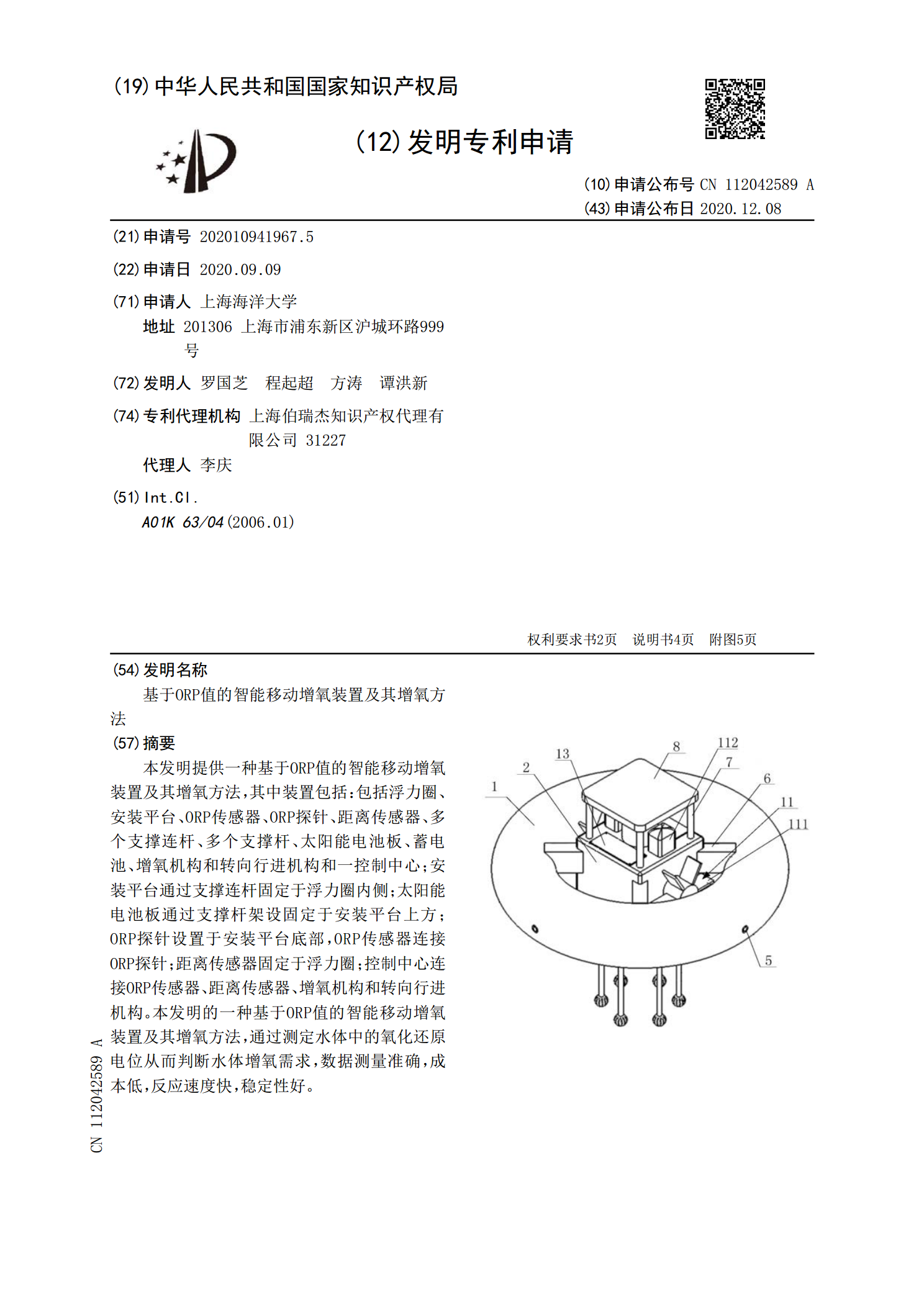
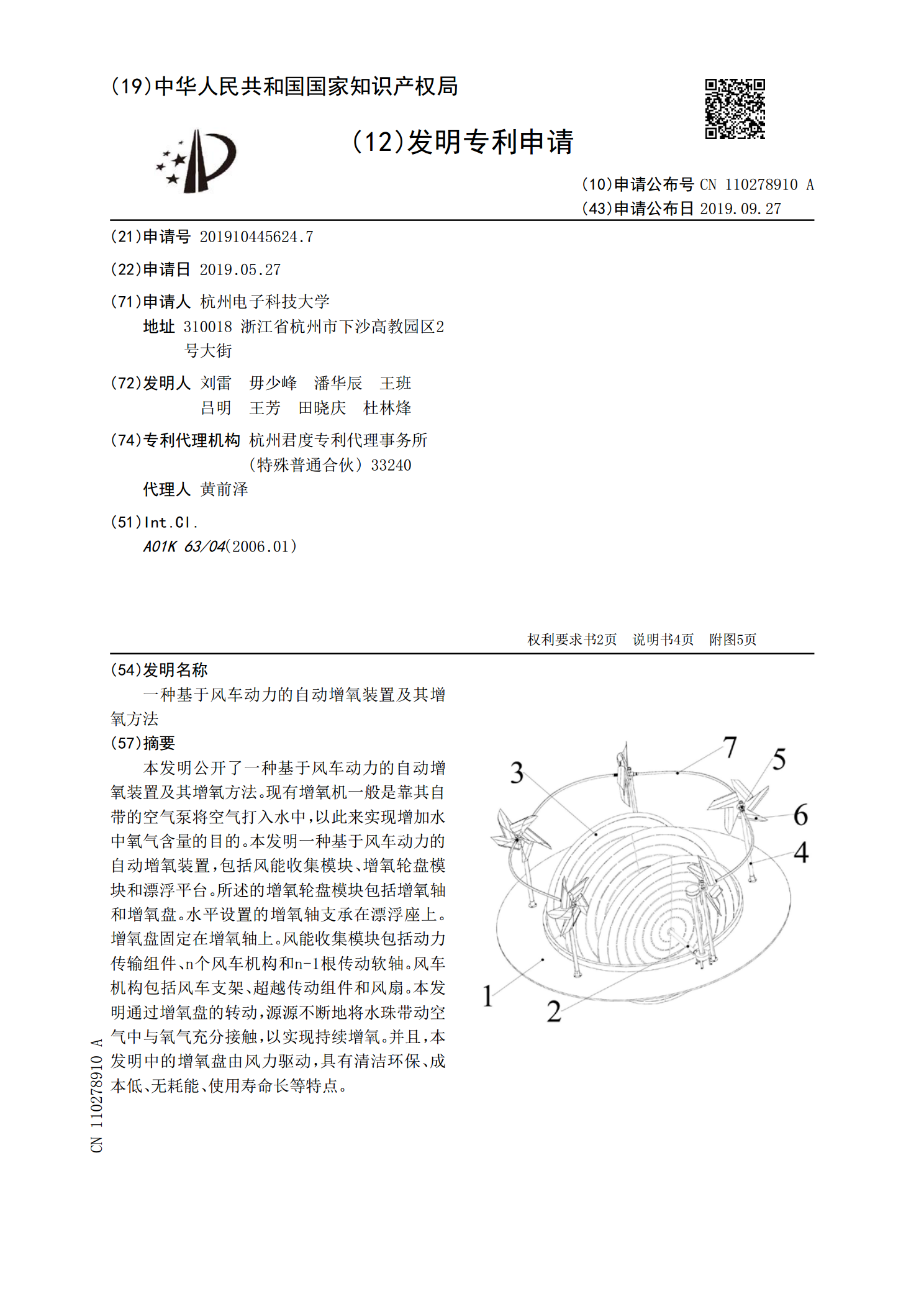
本发明提供一种基于ORP值的智能移动增氧装置及其增氧方法,其中装置包括:包括浮力圈、安装平台、ORP传感器、ORP探针、距离传感器、多个支撑连杆、多个支撑杆、太阳能电池板、蓄电池、增氧机构和转向行进机构和一控制中心;安装平台通过支撑连杆固定于浮力圈内侧;太阳能电池板通过支撑杆架设固定于安装平台上方;ORP探针设置于安装平台底部,ORP传感器连接ORP探针;距离传感器固定于浮力圈;控制中心连接ORP传感器、距离传感器、增氧机构和转向行进机构。本发明的一种基于ORP值的智能移动增氧装置及其增氧方法,通过测定水
一种基于风车动力的自动增氧装置及其增氧方法.pdf
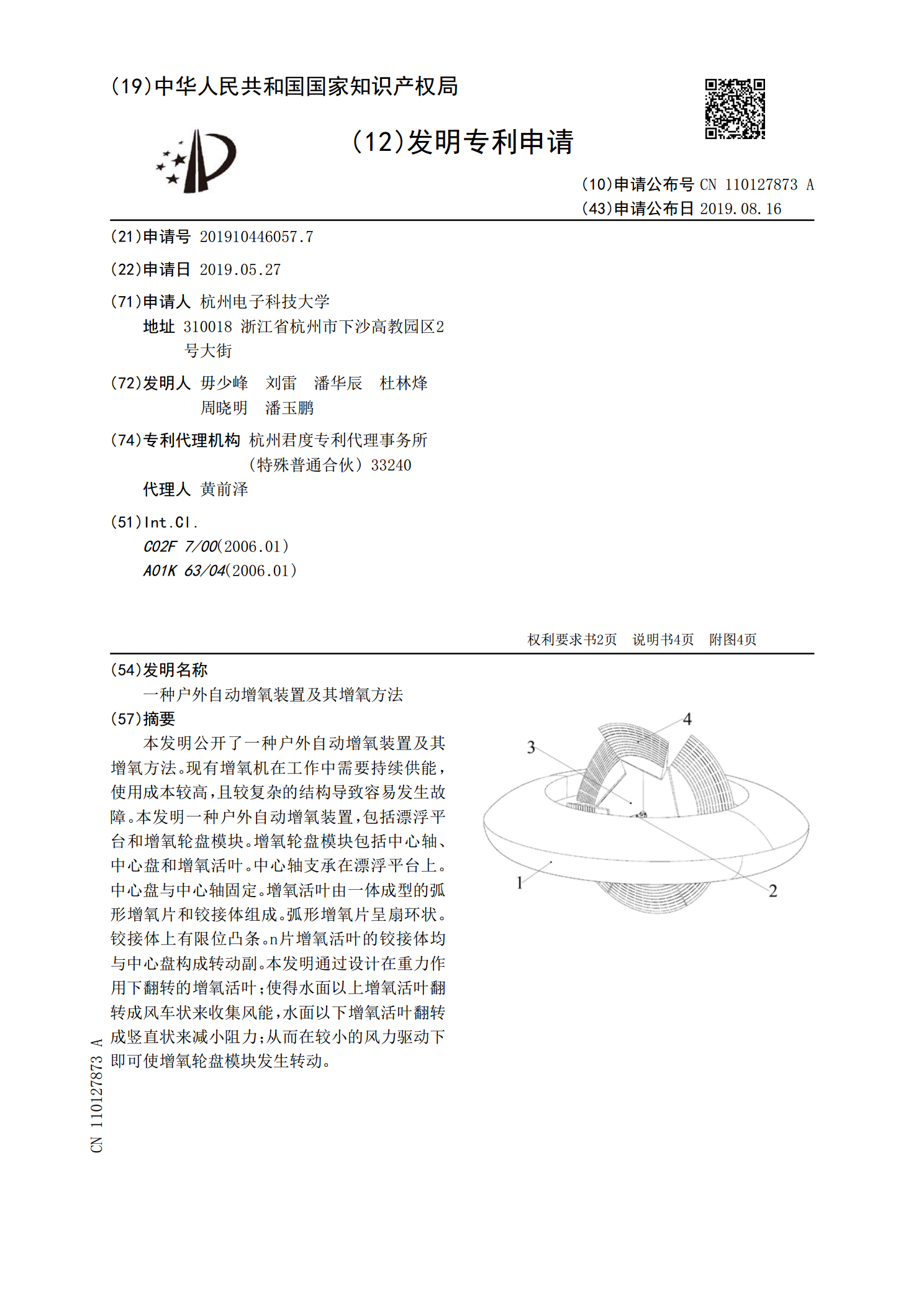
本发明公开了一种基于风车动力的自动增氧装置及其增氧方法。现有增氧机一般是靠其自带的空气泵将空气打入水中,以此来实现增加水中氧气含量的目的。本发明一种基于风车动力的自动增氧装置,包括风能收集模块、增氧轮盘模块和漂浮平台。所述的增氧轮盘模块包括增氧轴和增氧盘。水平设置的增氧轴支承在漂浮座上。增氧盘固定在增氧轴上。风能收集模块包括动力传输组件、n个风车机构和n‑1根传动软轴。风车机构包括风车支架、超越传动组件和风扇。本发明通过增氧盘的转动,源源不断地将水珠带动空气中与氧气充分接触,以实现持续增氧。并且,本发明中
一种户外自动增氧装置及其增氧方法.pdf
本发明公开了一种户外自动增氧装置及其增氧方法。现有增氧机在工作中需要持续供能,使用成本较高,且较复杂的结构导致容易发生故障。本发明一种户外自动增氧装置,包括漂浮平台和增氧轮盘模块。增氧轮盘模块包括中心轴、中心盘和增氧活叶。中心轴支承在漂浮平台上。中心盘与中心轴固定。增氧活叶由一体成型的弧形增氧片和铰接体组成。弧形增氧片呈扇环状。铰接体上有限位凸条。n片增氧活叶的铰接体均与中心盘构成转动副。本发明通过设计在重力作用下翻转的增氧活叶;使得水面以上增氧活叶翻转成风车状来收集风能,水面以下增氧活叶翻转成竖直状来减
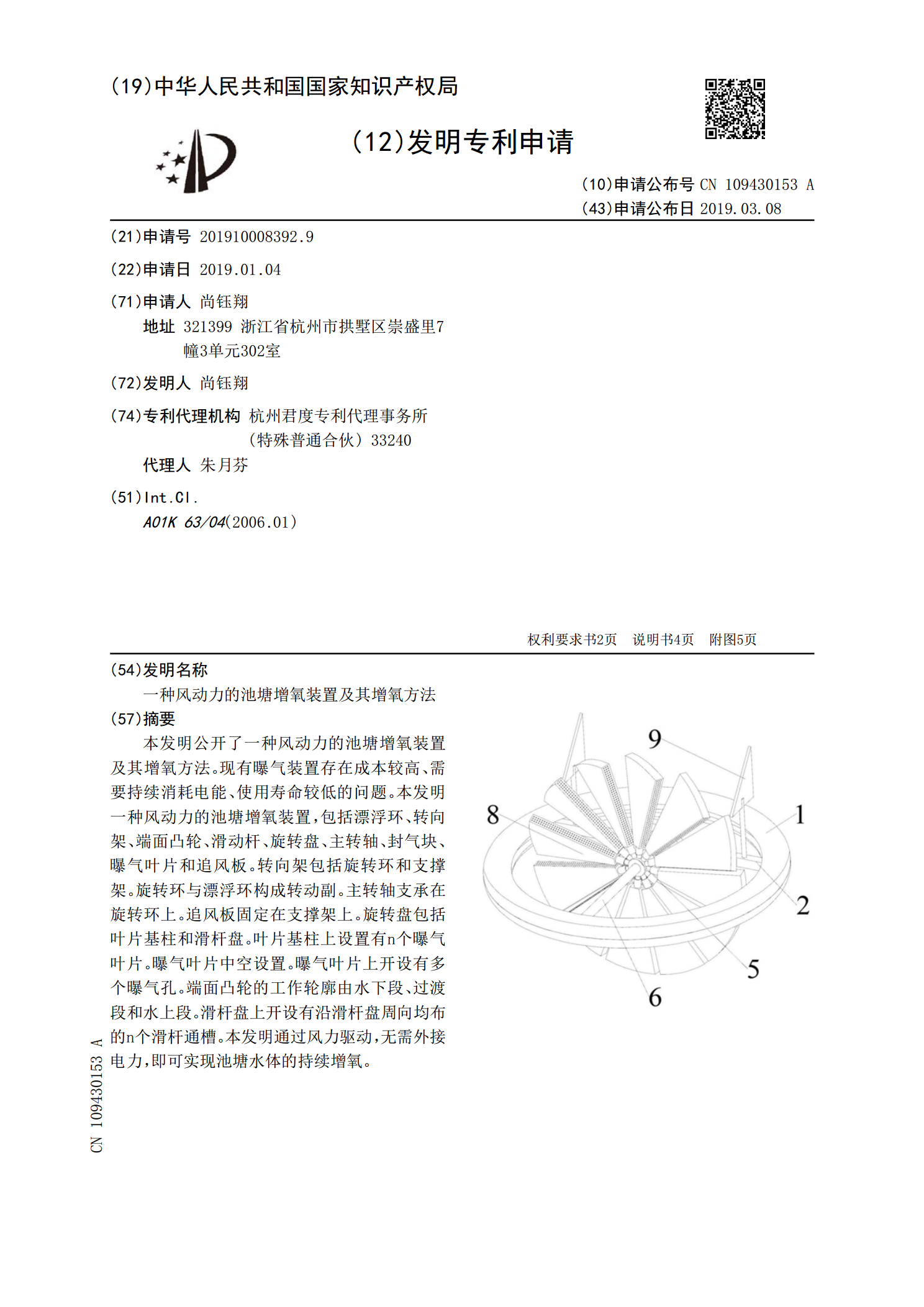
一种风动力的池塘增氧装置及其增氧方法.pdf
本发明公开了一种风动力的池塘增氧装置及其增氧方法。现有曝气装置存在成本较高、需要持续消耗电能、使用寿命较低的问题。本发明一种风动力的池塘增氧装置,包括漂浮环、转向架、端面凸轮、滑动杆、旋转盘、主转轴、封气块、曝气叶片和追风板。转向架包括旋转环和支撑架。旋转环与漂浮环构成转动副。主转轴支承在旋转环上。追风板固定在支撑架上。旋转盘包括叶片基柱和滑杆盘。叶片基柱上设置有n个曝气叶片。曝气叶片中空设置。曝气叶片上开设有多个曝气孔。端面凸轮的工作轮廓由水下段、过渡段和水上段。滑杆盘上开设有沿滑杆盘周向均布的n个滑杆
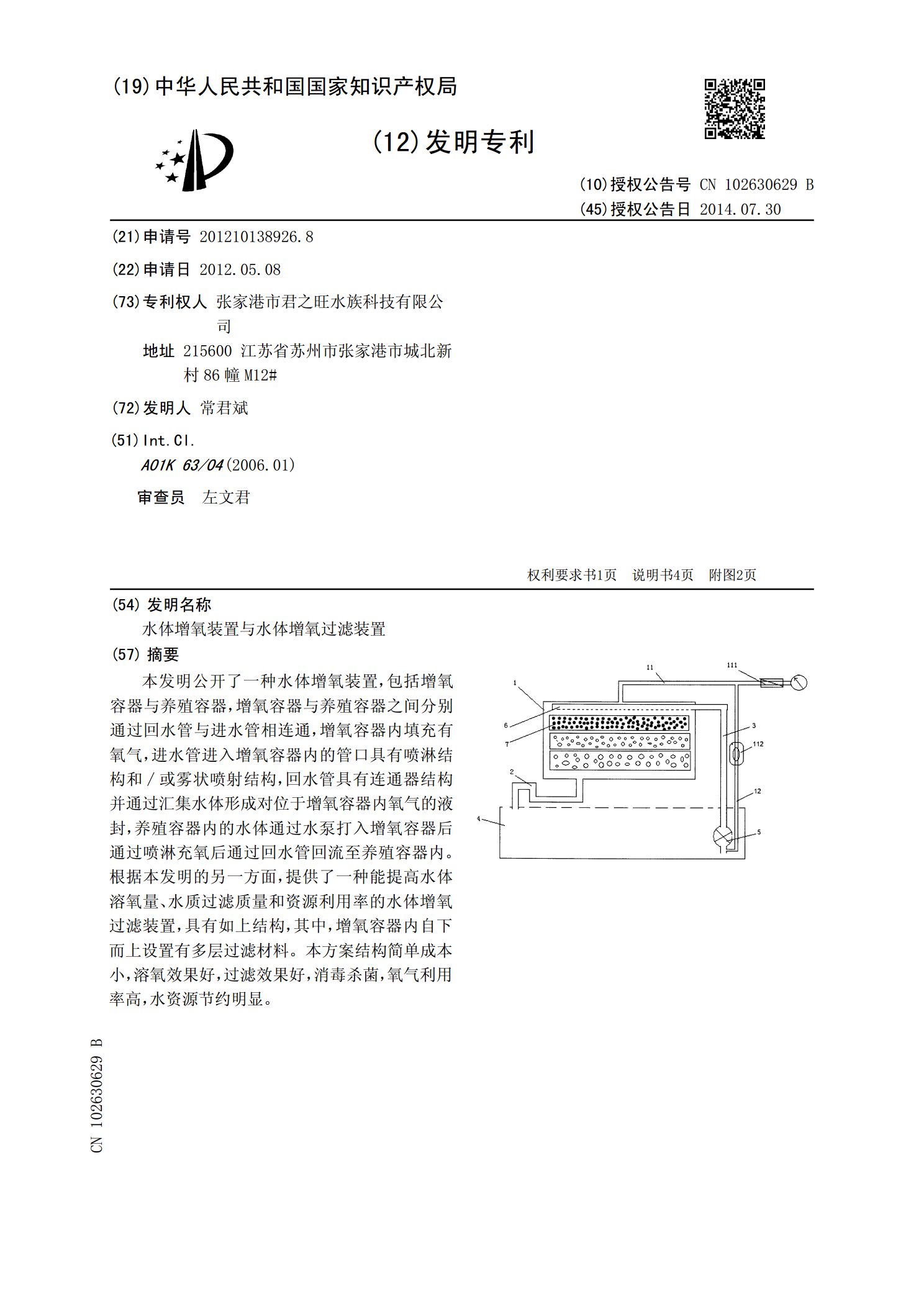
水体增氧装置与水体增氧过滤装置.pdf
本发明公开了一种水体增氧装置,包括增氧容器与养殖容器,增氧容器与养殖容器之间分别通过回水管与进水管相连通,增氧容器内填充有氧气,进水管进入增氧容器内的管口具有喷淋结构和/或雾状喷射结构,回水管具有连通器结构并通过汇集水体形成对位于增氧容器内氧气的液封,养殖容器内的水体通过水泵打入增氧容器后通过喷淋充氧后通过回水管回流至养殖容器内。根据本发明的另一方面,提供了一种能提高水体溶氧量、水质过滤质量和资源利用率的水体增氧过滤装置,具有如上结构,其中,增氧容器内自下而上设置有多层过滤材料。本方案结构简单成本小,溶氧